También podría gustarte
- F. Agüera, F.J. Aguilar, F. Carvajal, M.A. Aguilar, B. NavarroDocumento1 páginaF. Agüera, F.J. Aguilar, F. Carvajal, M.A. Aguilar, B. NavarroYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- 083Documento1 página083YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- F. Agüera, F.J. Aguilar, F. Carvajal, M.A. Aguilar, B. NavarroDocumento1 páginaF. Agüera, F.J. Aguilar, F. Carvajal, M.A. Aguilar, B. NavarroYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- F. Agüera, F.J. Aguilar, F. Carvajal, M.A. Aguilar, B. NavarroDocumento1 páginaF. Agüera, F.J. Aguilar, F. Carvajal, M.A. Aguilar, B. NavarroYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- 145Documento1 página145YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- O L L L L L L L L L L L O A A B B D D W: Capítulo 2 Fundamentos de Cinemática 33Documento1 páginaO L L L L L L L L L L L O A A B B D D W: Capítulo 2 Fundamentos de Cinemática 33YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- 255Documento1 página255YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
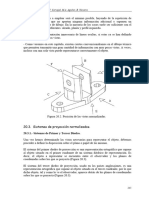
- ' en Una Dirección Que Forma Un Ángulo de 45° Con El Eje de La CarDocumento1 página' en Una Dirección Que Forma Un Ángulo de 45° Con El Eje de La CarYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Preliminares - Indd XVII Preliminares - Indd XVII 1/29/09 6:36:04 PM 1/29/09 6:36:04 PMDocumento1 páginaPreliminares - Indd XVII Preliminares - Indd XVII 1/29/09 6:36:04 PM 1/29/09 6:36:04 PMYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Capítulo 3 Síntesis Gráfi Ca de Eslabonamientos - . - . - . - . - . - . - . - . - . - . 87Documento1 páginaCapítulo 3 Síntesis Gráfi Ca de Eslabonamientos - . - . - . - . - . - . - . - . - . - . 87YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- A) Inversión Número 1 B) Inversión Número 2 C) Inversión Número 3 D) Inversión Número 4Documento1 páginaA) Inversión Número 1 B) Inversión Número 2 C) Inversión Número 3 D) Inversión Número 4YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- . De manera que (σ) .32 .415 (0.961) / (1 (0.885) ) : 750 Capítulo 14 Engranes rectos y helicoidalesDocumento1 página. De manera que (σ) .32 .415 (0.961) / (1 (0.885) ) : 750 Capítulo 14 Engranes rectos y helicoidalesYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Módulo Volumétrico: Figura 2.70 Estado de Esfuerzos Figura 2.69 Una Barra en TensiónDocumento1 páginaMódulo Volumétrico: Figura 2.70 Estado de Esfuerzos Figura 2.69 Una Barra en TensiónYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Límite Elástico y Deformación Plástica: Figura 2.62 Capa de MaterialDocumento1 páginaLímite Elástico y Deformación Plástica: Figura 2.62 Capa de MaterialYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Figura P2.68: Capítulo 16 Movimiento Plano de Cuerpos Rígidos: Fuerzas y AceleracionesDocumento1 páginaFigura P2.68: Capítulo 16 Movimiento Plano de Cuerpos Rígidos: Fuerzas y AceleracionesYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- A) El Cambio de Longitud de La Tubería, B) El Cambio en Su Diámetro Exterior, C) El Cambio en Su Espesor de ParedDocumento1 páginaA) El Cambio de Longitud de La Tubería, B) El Cambio en Su Diámetro Exterior, C) El Cambio en Su Espesor de ParedYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Problemas: B) Diámetro CDDocumento1 páginaProblemas: B) Diámetro CDYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- 125Documento1 página125YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- A) Localización Del Rotopolo en El Ejemplo 3-2Documento1 páginaA) Localización Del Rotopolo en El Ejemplo 3-2YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Barras de Watt Cuya Primera Etapa Es de Grashof Como Se Muestra en La Fi Gura 3-7b. Por Lo Tanto, SeDocumento1 páginaBarras de Watt Cuya Primera Etapa Es de Grashof Como Se Muestra en La Fi Gura 3-7b. Por Lo Tanto, SeYVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- 128Documento1 página128YVAN RENE LEIVA CALVANAPONAún no hay calificaciones
- Incorporación de Ejercitos en El TEGDocumento13 páginasIncorporación de Ejercitos en El TEGRicardo FantiniAún no hay calificaciones
- Guia Uno Ingles 6-7Documento7 páginasGuia Uno Ingles 6-7Andres LindadoAún no hay calificaciones
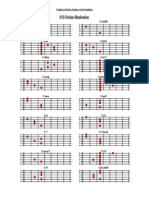
- Tablaturas para GuitarraDocumento18 páginasTablaturas para GuitarraHenry Heart100% (1)
- Asignación #4 MAEC 2221Documento4 páginasAsignación #4 MAEC 2221Yarianis Ortiz PadillaAún no hay calificaciones
- TALLER DE ESPAÑOL GRADO 2º. Letra SDocumento4 páginasTALLER DE ESPAÑOL GRADO 2º. Letra SCindy100% (1)
- I Periodo - Inglés 3 º - Acumulativa - 2024Documento2 páginasI Periodo - Inglés 3 º - Acumulativa - 2024Melanny Kristel Marval ToroAún no hay calificaciones
- En Una Fábrica de Bolsas de Plástico Un Aspecto Importante de Calidad Es La Dimensión de Las BolsasDocumento2 páginasEn Una Fábrica de Bolsas de Plástico Un Aspecto Importante de Calidad Es La Dimensión de Las BolsasOrtega Martinez JohanithaAún no hay calificaciones
- Matemática 19 de AgostoDocumento3 páginasMatemática 19 de AgostoHugo Rueda CarbajalAún no hay calificaciones
- MDocumento1 páginaM654catAún no hay calificaciones
- Zona de Actividad Minera y Zona de Exclusión MineraDocumento1 páginaZona de Actividad Minera y Zona de Exclusión MineraDarwin Arapa GuzmánAún no hay calificaciones
- Defensa Manhattan y Sist. TarraschDocumento3 páginasDefensa Manhattan y Sist. TarraschOscar DiazAún no hay calificaciones
- Taller EndoDocumento3 páginasTaller EndoMONICA DANIELA ROMERO NOCUAAún no hay calificaciones
- Práctica 2 - Gráficas de VelocidadDocumento3 páginasPráctica 2 - Gráficas de VelocidadJosé CalderónAún no hay calificaciones
- 4.polinomio Completo y Ordenado - AlgDocumento3 páginas4.polinomio Completo y Ordenado - AlgFRANKLER MILLER MUNDACA GONZALESAún no hay calificaciones
- Formato PR1Documento1 páginaFormato PR1Daniel OsorioAún no hay calificaciones
- Cómo Hablamos Los ChilenosDocumento13 páginasCómo Hablamos Los ChilenosPili RojasAún no hay calificaciones
- Jerarquia de OperacionesDocumento4 páginasJerarquia de OperacionesNoelia Edith Medrano ChaboyaAún no hay calificaciones
- ESCALA DE INADAPTACIÓN (Echeburúa y Corral, 1995)Documento1 páginaESCALA DE INADAPTACIÓN (Echeburúa y Corral, 1995)Brenda ChavezAún no hay calificaciones
- Rúbrica de Trabajo Lectura ComplementariaDocumento1 páginaRúbrica de Trabajo Lectura ComplementariaCynthia Karina Navarrete LeonAún no hay calificaciones
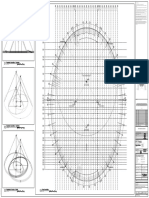
- Fp-Free: Replanteo Volumétrico - FachaadaDocumento1 páginaFp-Free: Replanteo Volumétrico - FachaadaMarco ReyesAún no hay calificaciones
- Numeros Primos y Compuestos PDFDocumento2 páginasNumeros Primos y Compuestos PDFPedro LopezAún no hay calificaciones
- Evalúe La Función en Los Valores IndicadosDocumento3 páginasEvalúe La Función en Los Valores IndicadosMauricio VergaraAún no hay calificaciones
- Aritmética: Práctica Dirigida deDocumento1 páginaAritmética: Práctica Dirigida deMax JuniorAún no hay calificaciones
- Actividad Aplicativa #14Documento3 páginasActividad Aplicativa #14Mileydi LazoAún no hay calificaciones
- Plantilla Levantamiento de Precios Mar2020Documento13 páginasPlantilla Levantamiento de Precios Mar2020juanAún no hay calificaciones
- Ejercicios de Pirámides Numéricas para Cuarto de PrimariaDocumento3 páginasEjercicios de Pirámides Numéricas para Cuarto de Primariaalexmn1978Aún no hay calificaciones
- 01-Definiciones de La Zona Costera PDFDocumento58 páginas01-Definiciones de La Zona Costera PDFCAROLAILEENAún no hay calificaciones
- Multiplicación de Números Fraccionarios para Quinto de PrimariaDocumento2 páginasMultiplicación de Números Fraccionarios para Quinto de PrimariaHilda Elizabeth VeraAún no hay calificaciones
- Mathcad - TareaContinuidadfinalDocumento6 páginasMathcad - TareaContinuidadfinalFrancisco GoFlesAún no hay calificaciones
- Preguntas Ranking Algebra YTrigonometriaDocumento3 páginasPreguntas Ranking Algebra YTrigonometriaKevin AsttAún no hay calificaciones