También podría gustarte
- Cinética Tridimensional de Un Cuerpo RigidoDocumento47 páginasCinética Tridimensional de Un Cuerpo RigidoDanielAlexisHuamanTitoAún no hay calificaciones
- Dinamica 1Documento42 páginasDinamica 1Joel50% (2)
- Antologia de Poemas de Indios EstadounidensesDocumento43 páginasAntologia de Poemas de Indios EstadounidensesPao Mejía RiveraAún no hay calificaciones
- Final EnlatadosDocumento22 páginasFinal EnlatadosJohn Dennis Tadeo FloresAún no hay calificaciones
- Breve Estudio Morfosintáctico de Un Texto de La General Estoria de Alfonso XDocumento7 páginasBreve Estudio Morfosintáctico de Un Texto de La General Estoria de Alfonso XMartínHacheAún no hay calificaciones
- Cinética de Cuerpos Rígidos en Movimiento - InvestigacionDocumento8 páginasCinética de Cuerpos Rígidos en Movimiento - InvestigacionTamar evansAún no hay calificaciones
- Ecuaciones de Movimiento 1Documento14 páginasEcuaciones de Movimiento 1Luis Huaman QuispeAún no hay calificaciones
- Universidad Tecnológica Del PerúDocumento14 páginasUniversidad Tecnológica Del PerúRonaldo Yeyson Aliaga RamírezAún no hay calificaciones
- Cinetica Tridimensional de Un Cuerpo RigidoDocumento31 páginasCinetica Tridimensional de Un Cuerpo RigidoAnthony García TorresAún no hay calificaciones
- Cinética Tridimensional de Un Cuerpo RígidoDocumento49 páginasCinética Tridimensional de Un Cuerpo RígidoJhonatan Chamorro CervantesAún no hay calificaciones
- Marco TeoricoDocumento17 páginasMarco TeoricoEstebanAún no hay calificaciones
- Cinética Tridimensional de Un Cuerpo RígidoDocumento5 páginasCinética Tridimensional de Un Cuerpo RígidoJhonatan Chamorro CervantesAún no hay calificaciones
- 11 - Cinética TridimensionalDocumento69 páginas11 - Cinética TridimensionalErcilia Eulalia MaldonadoAún no hay calificaciones
- S11.s1 Fundamentos Dinamica 1Documento45 páginasS11.s1 Fundamentos Dinamica 1kenny YTAún no hay calificaciones
- S10 s18 CinéticaDocumento44 páginasS10 s18 CinéticaRonal VilcasAún no hay calificaciones
- Momentos de Inercia y Teorema de Ejes ParalelosDocumento4 páginasMomentos de Inercia y Teorema de Ejes ParalelosDaniel SanchezAún no hay calificaciones
- Momento de Inercia Mecanica RacionalDocumento7 páginasMomento de Inercia Mecanica RacionalPedro HerreraAún no hay calificaciones
- Cinetica de Los CuerposDocumento12 páginasCinetica de Los CuerposmmlutzowAún no hay calificaciones
- Cinética Del Cuerpo RígidoDocumento18 páginasCinética Del Cuerpo Rígido01-IC-HU-EDUARDO ABILIO PARRAGA ARROYOAún no hay calificaciones
- Resum01T5 19510020Documento6 páginasResum01T5 19510020Manuel CruzAún no hay calificaciones
- TEORIA de Momento de InerciaDocumento6 páginasTEORIA de Momento de Inerciajpdavila205Aún no hay calificaciones
- Metal Modulo de YoungDocumento5 páginasMetal Modulo de YoungAlex GabrielAún no hay calificaciones
- Resume N Mecanic ADocumento9 páginasResume N Mecanic ADiego Tafur LópezAún no hay calificaciones
- Momento de Inercia, Momento Polar de Inercia y Diagramas de F Cortantes y Momento FlectorDocumento14 páginasMomento de Inercia, Momento Polar de Inercia y Diagramas de F Cortantes y Momento FlectorLuis CaballeroAún no hay calificaciones
- EstaticaDocumento6 páginasEstaticaMartin FigueroaAún no hay calificaciones
- Teorema de Ejes ParalelosDocumento2 páginasTeorema de Ejes Paralelosjosefa reyes100% (1)
- Ecuaciones de La Cinemática Del Cuerpo Rígido Con MovimientoDocumento19 páginasEcuaciones de La Cinemática Del Cuerpo Rígido Con Movimientoroberto ortegaAún no hay calificaciones
- Momento de InerciaDocumento4 páginasMomento de InerciaAxel Isaac H ZAún no hay calificaciones
- Fisica de Fluidos Momentos de InerciaDocumento6 páginasFisica de Fluidos Momentos de InerciaBrayan MoralesAún no hay calificaciones
- Cinetica de Cuerpos Rigidos en 3DDocumento16 páginasCinetica de Cuerpos Rigidos en 3DMCAún no hay calificaciones
- ESTRUCTURAS ISOSTATICAS (Recopilado)Documento25 páginasESTRUCTURAS ISOSTATICAS (Recopilado)RobyEangerAún no hay calificaciones
- Teorema de Ejes ParalelosDocumento2 páginasTeorema de Ejes Paralelosjosefa reyesAún no hay calificaciones
- Maquinaria Pesada y Movimientos de TierraDocumento33 páginasMaquinaria Pesada y Movimientos de TierraLeonardo DiazAún no hay calificaciones
- Tema Iii, Cinetica de Cuerpo RigidoDocumento60 páginasTema Iii, Cinetica de Cuerpo RigidoEisenhower Chaljub100% (11)
- Unidad 6 Cinética Plana de Cuerpos RígidosDocumento18 páginasUnidad 6 Cinética Plana de Cuerpos Rígidos1000DIEGO1000100% (1)
- Momentos de Inercia BosquejoDocumento6 páginasMomentos de Inercia BosquejoMichael GuerreroAún no hay calificaciones
- Ecuaciones Del MovimientoDocumento7 páginasEcuaciones Del MovimientoNikolay Fuel NcfcAún no hay calificaciones
- Mecánica y MecanismosDocumento17 páginasMecánica y MecanismosRoger ChungAún no hay calificaciones
- Ejes Principales de InerciaDocumento4 páginasEjes Principales de InerciaBeto Mera LaraAún no hay calificaciones
- Vibraciones Mecanicas - WillyvalroDocumento37 páginasVibraciones Mecanicas - WillyvalroPedroAún no hay calificaciones
- Resum02T5 19510023Documento7 páginasResum02T5 19510023Adan Dominguez RobledoAún no hay calificaciones
- Momento de InerciaDocumento18 páginasMomento de InerciaEli HillAún no hay calificaciones
- Momento de InerciaDocumento7 páginasMomento de InerciaMarcelo Alexandro Pontio CataldoAún no hay calificaciones
- Unidad2 DinamicaDocumento32 páginasUnidad2 DinamicaMateo YacelgaAún no hay calificaciones
- Exposicion 4Documento35 páginasExposicion 4Edgar GonzalezAún no hay calificaciones
- CollectionDocumento5 páginasCollectionabreujose123Aún no hay calificaciones
- Movimiento Plano en Cuerpos Rígidos.Documento18 páginasMovimiento Plano en Cuerpos Rígidos.liberenanelsondelrodeoAún no hay calificaciones
- Dinámica de Un Sistema de PartículasDocumento6 páginasDinámica de Un Sistema de PartículasFelipe Antonio Luengo AracenaAún no hay calificaciones
- Separata-Movimiento Plano de Cuerpo RigidoDocumento14 páginasSeparata-Movimiento Plano de Cuerpo RigidoIoel QcAún no hay calificaciones
- Momento de InerciaDocumento12 páginasMomento de Inerciaandres villamizarAún no hay calificaciones
- Proyecto 3Documento25 páginasProyecto 3Roberth David Pinoargote ZambranoAún no hay calificaciones
- Dina MicaDocumento8 páginasDina MicastevenAún no hay calificaciones
- Investigación Momento de Inercia. Mario LagosDocumento10 páginasInvestigación Momento de Inercia. Mario LagosWalter Meneses CordobaAún no hay calificaciones
- Cinemática Del Movimiento Del Cuerpo RígidoDocumento13 páginasCinemática Del Movimiento Del Cuerpo RígidoAndres Davila MonteroAún no hay calificaciones
- Modulo Movimiento Plano de Cuerpo RigidoDocumento14 páginasModulo Movimiento Plano de Cuerpo RigidowalterAún no hay calificaciones
- INVESTIGACION - UNIDAD III - GALLEGOS - 3367 (Recuperado Automáticamente)Documento26 páginasINVESTIGACION - UNIDAD III - GALLEGOS - 3367 (Recuperado Automáticamente)Edgar GallegosAún no hay calificaciones
- Dinamica GermaniaDocumento11 páginasDinamica Germaniaanthony acuñaAún no hay calificaciones
- Guía para el análisis y solución de problemas de resistencia de materialesDe EverandGuía para el análisis y solución de problemas de resistencia de materialesAún no hay calificaciones
- Momentos de velocidad: Capturando la dinámica: conocimientos sobre la visión por computadoraDe EverandMomentos de velocidad: Capturando la dinámica: conocimientos sobre la visión por computadoraAún no hay calificaciones
- Estudio y Diseño Definitivo Del Proyecto Escalón 2 - Desde La Calle Juan Bernardo Hasta La Av. Camilo Orejuela - Provincia de PichinchaDocumento2 páginasEstudio y Diseño Definitivo Del Proyecto Escalón 2 - Desde La Calle Juan Bernardo Hasta La Av. Camilo Orejuela - Provincia de PichinchaAngie JayaAún no hay calificaciones
- Estudio y Diseño Definitivo Del Proyecto Escalón 2 - Desde La Calle Juan Bernardo Hasta La Av. Camilo Orejuela - Provincia de PichinchaDocumento1 páginaEstudio y Diseño Definitivo Del Proyecto Escalón 2 - Desde La Calle Juan Bernardo Hasta La Av. Camilo Orejuela - Provincia de PichinchaAngie JayaAún no hay calificaciones
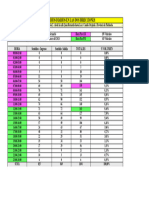
- Flujos Horarios Diarios en Las Dos Direcciones: Hora Sentidos - Ingreso Sentido-Salida Totales %volumenDocumento1 páginaFlujos Horarios Diarios en Las Dos Direcciones: Hora Sentidos - Ingreso Sentido-Salida Totales %volumenAngie JayaAún no hay calificaciones
- Estudio y Diseño Definitivo Del Proyecto Escalón 2 - Desde La Calle Juan Bernardo Hasta La Av. Camilo Orejuela - Provincia de PichinchaDocumento1 páginaEstudio y Diseño Definitivo Del Proyecto Escalón 2 - Desde La Calle Juan Bernardo Hasta La Av. Camilo Orejuela - Provincia de PichinchaAngie JayaAún no hay calificaciones
- LECCIÓN I PARCIAL - Revisión Del IntentoDocumento3 páginasLECCIÓN I PARCIAL - Revisión Del IntentoAngie JayaAún no hay calificaciones
- Taller #7 - 2p Jaya Angie.Documento2 páginasTaller #7 - 2p Jaya Angie.Angie JayaAún no hay calificaciones
- Taller #7 - 2PDocumento1 páginaTaller #7 - 2PAngie JayaAún no hay calificaciones
- 9.fallas en Trabes en CantiliverDocumento1 página9.fallas en Trabes en CantiliverAngie JayaAún no hay calificaciones
- EXAMEN PARCIAL 1 - Revisión Del IntentoDocumento5 páginasEXAMEN PARCIAL 1 - Revisión Del IntentoAngie JayaAún no hay calificaciones
- Estudio y Diseño Definitivo Del Proyecto Escalón 2 - Desde La Calle Juan Bernardo Hasta La Av. Camilo Orejuela - Provincia de PichinchaDocumento1 páginaEstudio y Diseño Definitivo Del Proyecto Escalón 2 - Desde La Calle Juan Bernardo Hasta La Av. Camilo Orejuela - Provincia de PichinchaAngie JayaAún no hay calificaciones
- Proyecto de Cam Po de AccionDocumento15 páginasProyecto de Cam Po de AccionAngie JayaAún no hay calificaciones
- MatlabDocumento12 páginasMatlabAngie JayaAún no hay calificaciones
- Bitacora 03 Sarahi JayaDocumento2 páginasBitacora 03 Sarahi JayaAngie JayaAún no hay calificaciones
- Mayerli Taller 4Documento2 páginasMayerli Taller 4Angie JayaAún no hay calificaciones
- Ingeniería Civil - Aulas 2023 2024 CiDocumento11 páginasIngeniería Civil - Aulas 2023 2024 CiAngie JayaAún no hay calificaciones
- Segundo Video 1Documento18 páginasSegundo Video 1Angie JayaAún no hay calificaciones
- Reflexiones Desde La Practica Profesional-Jaya AngieDocumento1 páginaReflexiones Desde La Practica Profesional-Jaya AngieAngie JayaAún no hay calificaciones
- Guia de Ensayos-1Documento2 páginasGuia de Ensayos-1Angie JayaAún no hay calificaciones
- Javier Espinoza Hoja de VidaDocumento1 páginaJavier Espinoza Hoja de VidaAngie JayaAún no hay calificaciones
- Taller #5 - 2p MayerliDocumento1 páginaTaller #5 - 2p MayerliAngie JayaAún no hay calificaciones
- Funciones en Excel.Documento2 páginasFunciones en Excel.Angie JayaAún no hay calificaciones
- Disposiciones Por Inicio de Clases, Periodo Académico 2023 - 2024 Ciclo I PDFDocumento2 páginasDisposiciones Por Inicio de Clases, Periodo Académico 2023 - 2024 Ciclo I PDFAngie JayaAún no hay calificaciones
- Andres Cedeño Topografia 1 Marzo PDFDocumento4 páginasAndres Cedeño Topografia 1 Marzo PDFAngie JayaAún no hay calificaciones
- Solicitud para Certificado de Estar Legalmente MatriculadoDocumento1 páginaSolicitud para Certificado de Estar Legalmente MatriculadoAngie JayaAún no hay calificaciones
- Examen Primer Parcial - Revisión Del IntentoDocumento3 páginasExamen Primer Parcial - Revisión Del IntentoAngie JayaAún no hay calificaciones
- Examen de Dinamica 2 Parcial Peñarrieta John PDFDocumento2 páginasExamen de Dinamica 2 Parcial Peñarrieta John PDFAngie JayaAún no hay calificaciones
- Reactivo PDFDocumento2 páginasReactivo PDFAngie JayaAún no hay calificaciones
- Sesión #10 - 2do PDocumento3 páginasSesión #10 - 2do PAngie JayaAún no hay calificaciones
- Sesión #9 - 2do P PDFDocumento4 páginasSesión #9 - 2do P PDFAngie JayaAún no hay calificaciones
- Tarea Ensayo3Documento20 páginasTarea Ensayo3Angie JayaAún no hay calificaciones
- Cap 11 - Estimadores de RazónDocumento19 páginasCap 11 - Estimadores de RazónAlvarado VillaAún no hay calificaciones
- Tarea 4 Ismael Escalona - 19.494.953Documento7 páginasTarea 4 Ismael Escalona - 19.494.953Ismael EscalonaAún no hay calificaciones
- TDR Forestal CalcaDocumento10 páginasTDR Forestal CalcaWilliams ZevallosAún no hay calificaciones
- Historia Del PerúDocumento28 páginasHistoria Del PerúAnabel QuiñonesAún no hay calificaciones
- Guía de Práctica Biofísica Médica 2016 IDocumento9 páginasGuía de Práctica Biofísica Médica 2016 IfranciscoAún no hay calificaciones
- Demografia 2020Documento139 páginasDemografia 2020Ortuño Herrera Camila PatriciaAún no hay calificaciones
- Teoria de ColasDocumento15 páginasTeoria de ColasAlexander SantamariaAún no hay calificaciones
- Reforzando Lo Aprendido DE NUMEROS ENTEROSDocumento5 páginasReforzando Lo Aprendido DE NUMEROS ENTEROSEtson Edu Alarcon AlarconAún no hay calificaciones
- View-Source:https://mail Google Com/mail/u/0/#inbox/1544716c536eb71aDocumento4 páginasView-Source:https://mail Google Com/mail/u/0/#inbox/1544716c536eb71agerardo rodriguezAún no hay calificaciones
- Climatologia Historica en LatinoAmDocumento29 páginasClimatologia Historica en LatinoAmSebastián GarcíaAún no hay calificaciones
- Aplicación de Criterios de Diseños Sismorresistentes Ante Sismos SeveroDocumento32 páginasAplicación de Criterios de Diseños Sismorresistentes Ante Sismos SeveroSheyla Jiménez MatuteAún no hay calificaciones
- Manual de Operaciones Foullard SantaStrechDocumento25 páginasManual de Operaciones Foullard SantaStrechOGAún no hay calificaciones
- REMITAL-m 5.1 20220322Documento18 páginasREMITAL-m 5.1 20220322andres mauricio lopez idarragaAún no hay calificaciones
- Formato - Revista ColombianaDocumento9 páginasFormato - Revista ColombianatomboAún no hay calificaciones
- 03 Borrador de Documento Ejecutivo Pdot Eloy AlfaroDocumento62 páginas03 Borrador de Documento Ejecutivo Pdot Eloy AlfaroWilmer VillarroelAún no hay calificaciones
- I.E.D Brasilia - Usme: Nuestra Estrealla, El SolDocumento2 páginasI.E.D Brasilia - Usme: Nuestra Estrealla, El SolJose MoraAún no hay calificaciones
- Universidad Peruana Los Andes: Vicerrectorado de InvestigaciónDocumento125 páginasUniversidad Peruana Los Andes: Vicerrectorado de Investigación05-ES-HU-NICOLE ALLISON YAURI NAVARROAún no hay calificaciones
- Practica Gestion Abastecimiento1ER PARCIALDocumento3 páginasPractica Gestion Abastecimiento1ER PARCIALFabiola PesantesAún no hay calificaciones
- Sacramentales Cuadernos-MonasticosDocumento14 páginasSacramentales Cuadernos-MonasticosPascualAún no hay calificaciones
- Reporte de Práctica 7 Biología Celular.Documento4 páginasReporte de Práctica 7 Biología Celular.valedamian.004Aún no hay calificaciones
- Matriz Dofa RseDocumento1 páginaMatriz Dofa RseHector ValenciaAún no hay calificaciones
- SEM 7 Losas LACUDocumento23 páginasSEM 7 Losas LACUMadeleine SAAún no hay calificaciones
- Cultura TiahuanacoDocumento2 páginasCultura Tiahuanacoandy rojas100% (2)
- SX de Retencion GastricaDocumento6 páginasSX de Retencion GastricaYáskara MorgadoAún no hay calificaciones
- Norma 022Documento25 páginasNorma 022alex0% (1)
- INFORME FINAL - Práctica Alimentaria IDocumento20 páginasINFORME FINAL - Práctica Alimentaria IEze LedesmaAún no hay calificaciones
- Resumen de Actividad en Petróleos de VenezuelaDocumento1 páginaResumen de Actividad en Petróleos de VenezuelaCosme FulanitoAún no hay calificaciones