También podría gustarte
- Analizador LógicoDocumento19 páginasAnalizador LógicoFidel Angel Baquero LagosAún no hay calificaciones
- Inf7 5683 Casa Nasimba OñaDocumento10 páginasInf7 5683 Casa Nasimba OñaJAIRO WLADIMIR TOCTAGUANO HUTOAún no hay calificaciones
- Instrumentación 1Documento6 páginasInstrumentación 1Humberto ArizaAún no hay calificaciones
- Informe Tia PortalDocumento10 páginasInforme Tia PortalWendy TaipeAún no hay calificaciones
- Proyecto Final SensoricaDocumento6 páginasProyecto Final SensoricaOscar Eduardo Alzate CardonaAún no hay calificaciones
- Guía Práctica 2 FinalizadoDocumento9 páginasGuía Práctica 2 FinalizadoEdgarMartinezAún no hay calificaciones
- Laboratorio 1 ProcesosDocumento4 páginasLaboratorio 1 Procesoscristian Gabriel Oporto ArancibiaAún no hay calificaciones
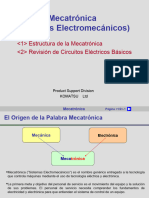
- 31 MecatrónicaDocumento17 páginas31 MecatrónicaFLAVIOAún no hay calificaciones
- Tema 1 - Parte 1Documento26 páginasTema 1 - Parte 1jhurguen guzman corralesAún no hay calificaciones
- Aplicacion Con LOGO!Documento3 páginasAplicacion Con LOGO!Anonymous BEAHDwiEkAún no hay calificaciones
- TI 3253 Tema1Documento10 páginasTI 3253 Tema1Carlos RodriguezAún no hay calificaciones
- Automatismo ElectricoDocumento152 páginasAutomatismo ElectricoSimon Caceres QuirozAún no hay calificaciones
- Lab 3Documento25 páginasLab 3geiner peraltaAún no hay calificaciones
- 411 - 2035472 - Juan Rodríguez - R6Documento15 páginas411 - 2035472 - Juan Rodríguez - R6Juan AntonioAún no hay calificaciones
- T Espe 033116 PDocumento37 páginasT Espe 033116 PISAEL BRACHOAún no hay calificaciones
- FeratGonzalez JoseManuel Actividad1Documento10 páginasFeratGonzalez JoseManuel Actividad1Jose .F.Aún no hay calificaciones
- Materia de ApoyoDocumento39 páginasMateria de ApoyoEstudiantilAún no hay calificaciones
- Informe 1Documento9 páginasInforme 1juan114dAún no hay calificaciones
- Saltos y SubrutinasDocumento10 páginasSaltos y SubrutinasArturoAún no hay calificaciones
- LAB3 - Componentes DentradaaaaaaaDocumento31 páginasLAB3 - Componentes DentradaaaaaaaGerson Ruben Chaupis JuarezAún no hay calificaciones
- TP N°1 Automatización AplicadaDocumento6 páginasTP N°1 Automatización AplicadaAngel BerriosAún no hay calificaciones
- Informe InstrumentacionDocumento29 páginasInforme InstrumentacionKevin Helbert RogelAún no hay calificaciones
- Norma Isa y SamaDocumento11 páginasNorma Isa y SamapaolaAún no hay calificaciones
- Control PIDDocumento20 páginasControl PIDJuan DavidAún no hay calificaciones
- Trabajo II Control de ProcesosDocumento6 páginasTrabajo II Control de Procesosdavid gonzales calderonAún no hay calificaciones
- Estado Del Arte en Sistemas de Automatización 1Documento181 páginasEstado Del Arte en Sistemas de Automatización 1Eliakin Sabrera IngaAún no hay calificaciones
- 2.1.2 Guía Taller 2Documento11 páginas2.1.2 Guía Taller 2Ignacio RivAún no hay calificaciones
- Fundamentos Tema 1 Componentes Básicos de SIDocumento34 páginasFundamentos Tema 1 Componentes Básicos de SIEduardo Acevedo OrihuelaAún no hay calificaciones
- Estado Del Arte en Sistemas de Automatización 1Documento169 páginasEstado Del Arte en Sistemas de Automatización 1Castañeda ValeriaAún no hay calificaciones
- Selector A 3 PosicionesDocumento14 páginasSelector A 3 PosicionesSebastian CruzAún no hay calificaciones
- Memoria DescriptivaDocumento9 páginasMemoria DescriptivaLuis ChacónAún no hay calificaciones
- Automatización de Un Proceso Industrial 1Documento248 páginasAutomatización de Un Proceso Industrial 1Ferdinand Raul Stone100% (1)
- Actividad 7 Trans ATDocumento3 páginasActividad 7 Trans ATLa empresa XAún no hay calificaciones
- DcsDocumento46 páginasDcsKaren Isabel Ambiado RivasAún no hay calificaciones
- Vims IiDocumento45 páginasVims IiMarcelo Diaz CortesAún no hay calificaciones
- AutomatizaciónDocumento347 páginasAutomatizaciónDavid EstradaAún no hay calificaciones
- Automatizacion de Estacion de Verificacion Didactica FestoDocumento9 páginasAutomatizacion de Estacion de Verificacion Didactica FestokeimakamisamaAún no hay calificaciones
- Presentacinnnn1 1262eaf0f1d89e6Documento42 páginasPresentacinnnn1 1262eaf0f1d89e6Santiago RiveraAún no hay calificaciones
- Tema 7 Instrumentacion y Control 2 2021Documento89 páginasTema 7 Instrumentacion y Control 2 2021Silvana Rojas MarancenbaumAún no hay calificaciones
- 3500 Guia de UsoDocumento47 páginas3500 Guia de UsoRafael Lopez100% (4)
- Arquitecturas Más UtilizadasDocumento3 páginasArquitecturas Más UtilizadasAureliano BarjauAún no hay calificaciones
- Practica 1Documento10 páginasPractica 1PerSk EzAún no hay calificaciones
- Clyon Manual Basico EspDocumento64 páginasClyon Manual Basico EspAlbetoAún no hay calificaciones
- Apuntes U1 y U2 PLCDocumento22 páginasApuntes U1 y U2 PLCCarlos BuenrostroAún no hay calificaciones
- Laboratorio Simulado 1Documento20 páginasLaboratorio Simulado 1steveduff19830% (1)
- Caracterizacion MPSDocumento29 páginasCaracterizacion MPSalexis pedroza0% (1)
- Preinforme 2Documento2 páginasPreinforme 2Jorge Andres Cardona AmorteguiAún no hay calificaciones
- Informe Sensor de MovimientoDocumento10 páginasInforme Sensor de MovimientoBryan Omar Yauri Santa Cruz0% (1)
- Manual de Operaciones de S.EDocumento95 páginasManual de Operaciones de S.EMFOBLLLLLLLAún no hay calificaciones
- Examen Final SensoresDocumento12 páginasExamen Final Sensoresirenequepuy05Aún no hay calificaciones
- Redes Industriales ExamenDocumento11 páginasRedes Industriales ExamenCristian Alarcon100% (5)
- Informe Final AutomaticaDocumento6 páginasInforme Final AutomaticaLeandro Esteban GarciaAún no hay calificaciones
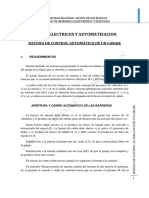
- Proyecto (Garaje) PDFDocumento12 páginasProyecto (Garaje) PDFAntony Salcedo Ortiz100% (1)
- PRÁCTICA 2 Aplicación de Conceptos Básicos de Lógica Cableada Y Lógica ProgramadaDocumento55 páginasPRÁCTICA 2 Aplicación de Conceptos Básicos de Lógica Cableada Y Lógica ProgramadaKATIA CASTRO ARMENDARIZAún no hay calificaciones
- Instrumentación, ParcialDocumento5 páginasInstrumentación, ParcialEder Doria VillalbaAún no hay calificaciones
- SAC3 - Miranda Matheo - U1 - LAB2 - 23-24Documento13 páginasSAC3 - Miranda Matheo - U1 - LAB2 - 23-24matheomiranda2006Aún no hay calificaciones
- Dispositivos de Control ElectronicoDocumento12 páginasDispositivos de Control Electronicofabian menesesAún no hay calificaciones
- Sistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208De EverandSistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208Aún no hay calificaciones
- Reingeniería De Procesos De Manufactura Industrial: Colaboración Entre Cuerpos Académicos Tlaxcala Y Puebla (Enero 2021)De EverandReingeniería De Procesos De Manufactura Industrial: Colaboración Entre Cuerpos Académicos Tlaxcala Y Puebla (Enero 2021)Calificación: 5 de 5 estrellas5/5 (2)
- ExamenDocumento2 páginasExamenroger floresAún no hay calificaciones
- PvisotestDocumento40 páginasPvisotestJose Luis RodriguezAún no hay calificaciones
- 001az019a Es XDocumento34 páginas001az019a Es XJhesus Lucena100% (2)
- Gran Turismo 5Documento36 páginasGran Turismo 5eoyjulioeoy100% (3)
- Matematicas Financieras Abel Maria Cano MoralesDocumento347 páginasMatematicas Financieras Abel Maria Cano MoralesRoxana MurilloAún no hay calificaciones
- Determinacion de Humedad Del Afrecho - COMENTARIO TECNICADocumento6 páginasDeterminacion de Humedad Del Afrecho - COMENTARIO TECNICADanny Daniel Romero CcasaniAún no hay calificaciones
- Diligencias Voluntarias de DivorcioDocumento3 páginasDiligencias Voluntarias de DivorcioManuel EduardoAún no hay calificaciones
- Exportación de Vinos en MendozaDocumento10 páginasExportación de Vinos en MendozaOlgaLuciaFigueroaAún no hay calificaciones
- Evaluacion Final BateaDocumento2 páginasEvaluacion Final BateaLeonel Sanjines RadaAún no hay calificaciones
- Diagnóstico de Fallas de Sistemas ElectromecánicosDocumento44 páginasDiagnóstico de Fallas de Sistemas ElectromecánicosMonter J Javier57% (14)
- 5.2 Dinamica de MaquinasDocumento14 páginas5.2 Dinamica de MaquinasLuis SimonAún no hay calificaciones
- Diseño de Un Sistema de Depuración para Concha Prieta Usando Acido Láctico Como Agente Antimicrobiano PDFDocumento95 páginasDiseño de Un Sistema de Depuración para Concha Prieta Usando Acido Láctico Como Agente Antimicrobiano PDFYocelin MorenoAún no hay calificaciones
- Monografia Viviendas PunoDocumento74 páginasMonografia Viviendas PunoHugo JuyoAún no hay calificaciones
- Sesion de Aprendizaje No11Documento5 páginasSesion de Aprendizaje No11Carlos QFAún no hay calificaciones
- Modificación Del Escape de Clavijas. Enrique BuenoDocumento14 páginasModificación Del Escape de Clavijas. Enrique BuenorhgnicanorAún no hay calificaciones
- Elasticidad EjemploDocumento2 páginasElasticidad EjemploKryssia MartinezAún no hay calificaciones
- Circular 016 Instrucciones 2da Convocatoria ESEDocumento2 páginasCircular 016 Instrucciones 2da Convocatoria ESEJean HerazoAún no hay calificaciones
- Exposición de Sistema de FrenosDocumento2 páginasExposición de Sistema de FrenosJean MarcoAún no hay calificaciones
- Ejemplo Reporte A3 - DERCODocumento14 páginasEjemplo Reporte A3 - DERCOJohn Francisco Murrugarra ZuñigaAún no hay calificaciones
- Helado Proceso y Composicion QuimicaDocumento17 páginasHelado Proceso y Composicion QuimicaZammy MayaAún no hay calificaciones
- Monomero Metil MetacrilatoDocumento8 páginasMonomero Metil MetacrilatoBelénAún no hay calificaciones
- Documentos para Matricula Articulación Media Técnica Guía Formatos 3Documento13 páginasDocumentos para Matricula Articulación Media Técnica Guía Formatos 3Santiago CañizaresAún no hay calificaciones
- Bautista Akane T2Documento4 páginasBautista Akane T2Akane Daniela Bautista BriseñoAún no hay calificaciones
- Trabajo Final de Seminario EmpresarialDocumento29 páginasTrabajo Final de Seminario EmpresarialDEgiraldo OliverAún no hay calificaciones
- Actividad Evaluativa Eje 2 Fundamentos de EconomiaDocumento7 páginasActividad Evaluativa Eje 2 Fundamentos de EconomiaDiego Fernandez ContresasAún no hay calificaciones
- Ruta CriticaDocumento47 páginasRuta CriticaJohn Fredy Calderon GarciaAún no hay calificaciones
- Primer Mensaje A La Legislatura Del Gobernador Amadeo Sabattini 1936Documento12 páginasPrimer Mensaje A La Legislatura Del Gobernador Amadeo Sabattini 1936Marcos FunesAún no hay calificaciones
- Integracion de Los Costos Indirectos de Los Santos U2Documento61 páginasIntegracion de Los Costos Indirectos de Los Santos U2gabriel munguia100% (1)
- Lab 1 Practica C Serie y ParaleloDocumento8 páginasLab 1 Practica C Serie y ParalelolokomapleAún no hay calificaciones
- Practica 1 LDRDocumento7 páginasPractica 1 LDRNava AylinAún no hay calificaciones