También podría gustarte
- Laboratorio 1Documento5 páginasLaboratorio 1Maria JuliaAún no hay calificaciones
- Laboratorio2 Control2Documento23 páginasLaboratorio2 Control20632021011Aún no hay calificaciones
- Lab05 Modelos Sistemas ElectricosDocumento5 páginasLab05 Modelos Sistemas ElectricosÁngel Reyes PizarroAún no hay calificaciones
- La PerronaDocumento21 páginasLa PerronaAngel David CarreraAún no hay calificaciones
- Introducción A La Programación Estructura en LabVIEWDocumento4 páginasIntroducción A La Programación Estructura en LabVIEWJuan Sebastián González GuerraAún no hay calificaciones
- Tarea 3 Garcia OchoaDocumento15 páginasTarea 3 Garcia OchoaChava GarciaAún no hay calificaciones
- Informefinal N°3Documento8 páginasInformefinal N°3Brayan VQAún no hay calificaciones
- Ejercicio 1 - SimulaciónDocumento4 páginasEjercicio 1 - SimulaciónAndy FloresAún no hay calificaciones
- Informe de Laboratorio 3Documento9 páginasInforme de Laboratorio 3Alejandra GranadaAún no hay calificaciones
- Evaluación DiagnósticaDocumento3 páginasEvaluación DiagnósticaMARCOS GILBERTO MEDINA PÉREZAún no hay calificaciones
- Tarea2 3Documento15 páginasTarea2 3JUAN DANIEL VASQUEZ RENGIFOAún no hay calificaciones
- LPVDocumento8 páginasLPVYulmer CardenasAún no hay calificaciones
- Lab 4 Miguel Torrejon Teoria de ControlDocumento12 páginasLab 4 Miguel Torrejon Teoria de ControlRafo OrtizAún no hay calificaciones
- Diseño de Un Servomotor en Base de Un Motor DC Usando Matlab/simulinkDocumento3 páginasDiseño de Un Servomotor en Base de Un Motor DC Usando Matlab/simulinkFranzum MamaniAún no hay calificaciones
- Control Robot ScaraDocumento10 páginasControl Robot ScaraAxel Luis Reategui LobatoAún no hay calificaciones
- Trabajo F1 - ICA - V2019 - ImparDocumento2 páginasTrabajo F1 - ICA - V2019 - ImparJunior Tejada SanchezAún no hay calificaciones
- Perez Arellano AlanDocumento15 páginasPerez Arellano AlanFernando ReyesAún no hay calificaciones
- De GR5 Alejandro Chicaiza Práctica#2 InformeDocumento4 páginasDe GR5 Alejandro Chicaiza Práctica#2 InformeAlejandro Sebastian Chicaiza TipanAún no hay calificaciones
- Previo 6 Sistemas de ControlesDocumento18 páginasPrevio 6 Sistemas de ControlesxvidAún no hay calificaciones
- SCII IF2 Cruz CondorDocumento7 páginasSCII IF2 Cruz CondorHarold Cruz SalasAún no hay calificaciones
- Modelo Dinámico 2R-P PDFDocumento15 páginasModelo Dinámico 2R-P PDFMarco RodríguezAún no hay calificaciones
- Informe de La Práctica de Laboratorio N4 ControlDocumento6 páginasInforme de La Práctica de Laboratorio N4 ControlEiverPaltaAún no hay calificaciones
- Lab 15 Simulacion Del Pendulo Invertido y Control Difuso PDFDocumento9 páginasLab 15 Simulacion Del Pendulo Invertido y Control Difuso PDFoscarlalilagosAún no hay calificaciones
- Diseño Del Sistema Bola BarraDocumento40 páginasDiseño Del Sistema Bola BarraErwin Geovanni Villalobos GutiérrezAún no hay calificaciones
- Entrega Final ProyectoDocumento5 páginasEntrega Final ProyectoKIi LeeAún no hay calificaciones
- Guia Robotica Simulacion Control PDFDocumento3 páginasGuia Robotica Simulacion Control PDFJaime Enrique Arango CastroAún no hay calificaciones
- Practica 2 - Simulaciones para Matlab y SimulinkDocumento4 páginasPractica 2 - Simulaciones para Matlab y SimulinkJimmy Arias (JimmyStron)Aún no hay calificaciones
- Robotica U A Problemario MoralesCabreraDocumento9 páginasRobotica U A Problemario MoralesCabreraDaniel MoralesAún no hay calificaciones
- Simulacion ROBOT 2GDLDocumento14 páginasSimulacion ROBOT 2GDLjulieta marquezAún no hay calificaciones
- Informe Final 3 - ModeladoDocumento7 páginasInforme Final 3 - ModeladoLUIS ALFREDO SANDOVAL SALINASAún no hay calificaciones
- Práctica 3 - Simulaciones para LabVIEW y Simulink PDFDocumento3 páginasPráctica 3 - Simulaciones para LabVIEW y Simulink PDFJimmy Arias (JimmyStron)Aún no hay calificaciones
- El Mundo Mágico de Las Funciones 1Documento15 páginasEl Mundo Mágico de Las Funciones 1MARIA CAMILA FONTALVO DOMINGUEZAún no hay calificaciones
- Control 5 PDFDocumento2 páginasControl 5 PDFhoolmanAún no hay calificaciones
- Sec Pv1 Pendulo Invertido 1314a-5195Documento12 páginasSec Pv1 Pendulo Invertido 1314a-5195Eddy León RamírezAún no hay calificaciones
- Lab01 - Control AvanzadoDocumento32 páginasLab01 - Control AvanzadowbejarAún no hay calificaciones
- Trabajo F1 - ICA - v2018 - Impar PDFDocumento2 páginasTrabajo F1 - ICA - v2018 - Impar PDFFabricio Benavente100% (1)
- Informe PspiceDocumento3 páginasInforme PspiceOscar David Vega HernandezAún no hay calificaciones
- Ej Prop 1 SC1 2019Documento4 páginasEj Prop 1 SC1 2019Nico DomínguezAún no hay calificaciones
- Implementación de Simulink en Un Robot Paralelo - RobóticaDocumento26 páginasImplementación de Simulink en Un Robot Paralelo - RobóticaAdrian RicardezAún no hay calificaciones
- Documents - MX - Simulacion de Un Robot de 2gdl en Matlab PDFDocumento3 páginasDocuments - MX - Simulacion de Un Robot de 2gdl en Matlab PDFheromx2Aún no hay calificaciones
- Siatemas de Control Practica 4Documento39 páginasSiatemas de Control Practica 4ERWIN GEOVANNI VILLALOBOS GUTIERREZAún no hay calificaciones
- Laboratorio1 Diagrama Bloques Simulink V2Documento8 páginasLaboratorio1 Diagrama Bloques Simulink V2AndresChangoluisaAún no hay calificaciones
- Presaberes Control AnalogoDocumento7 páginasPresaberes Control AnalogoGerman Correa100% (10)
- Laboratorio1 Diagrama Bloques Simulink V2 (Realizado1) 2Documento14 páginasLaboratorio1 Diagrama Bloques Simulink V2 (Realizado1) 2Andres UchoAún no hay calificaciones
- Informe Final 3Documento5 páginasInforme Final 3Darwin Dario Uscacchi ValenciaAún no hay calificaciones
- Paper Fina 3Documento6 páginasPaper Fina 3Ricardo ZapataAún no hay calificaciones
- SimulinkDocumento12 páginasSimulinkJeanpBalbinAún no hay calificaciones
- TP 63Documento4 páginasTP 63isaacAún no hay calificaciones
- Respuesta en Sistema de Primer Orden Con Escalon UnitarioDocumento6 páginasRespuesta en Sistema de Primer Orden Con Escalon UnitarioDaisy GutiérrezAún no hay calificaciones
- Deber 3 - Cinemática de Robots IndustrialesDocumento5 páginasDeber 3 - Cinemática de Robots IndustrialesCristian UrrestaAún no hay calificaciones
- Practica 4 PIDDocumento11 páginasPractica 4 PIDCristhiam Flores ZavalaAún no hay calificaciones
- Informe de Laboratorio #2Documento4 páginasInforme de Laboratorio #2Lil GaugeAún no hay calificaciones
- SISTEMAS DINÁMICOS FINAL TERMINADO Etapa 2Documento25 páginasSISTEMAS DINÁMICOS FINAL TERMINADO Etapa 2carlospovedaAún no hay calificaciones
- Matlab ControlDocumento9 páginasMatlab Controljuan carlos revillaAún no hay calificaciones
- Implementación de Una Planta Con Amplificadores OperacionalesDocumento2 páginasImplementación de Una Planta Con Amplificadores OperacionalesSantiago Alfonso Castellanos MaestreAún no hay calificaciones
- IE3041 - Lab 8, GuíaDocumento3 páginasIE3041 - Lab 8, Guíaangelomachorro6Aún no hay calificaciones
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- Características de Los EmprendedoresDocumento10 páginasCaracterísticas de Los EmprendedoresMaria JuliaAún no hay calificaciones
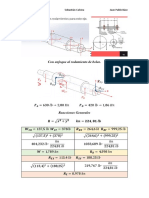
- La Figura 3.19, Muestra El Diseño Que Se Quiere Implementar para Los Apicultores, Consiste en Usar Poleas Fijas y MóvilesDocumento10 páginasLa Figura 3.19, Muestra El Diseño Que Se Quiere Implementar para Los Apicultores, Consiste en Usar Poleas Fijas y MóvilesMaria JuliaAún no hay calificaciones
- TareaDocumento1 páginaTareaMaria JuliaAún no hay calificaciones
- Curriculum Vitae Descripción 1 2 3 4 5 6 7 8 9 10Documento1 páginaCurriculum Vitae Descripción 1 2 3 4 5 6 7 8 9 10Maria JuliaAún no hay calificaciones
- Mano de Obra: Figura 1.8. Causas Por La Cual Ocurren Lesiones Fuentes: Elaboración PropiaDocumento3 páginasMano de Obra: Figura 1.8. Causas Por La Cual Ocurren Lesiones Fuentes: Elaboración PropiaMaria JuliaAún no hay calificaciones
- Carlos CaballeroDocumento3 páginasCarlos CaballeroMaria JuliaAún no hay calificaciones
- Tarea 1 - Sistemas InteligentesDocumento9 páginasTarea 1 - Sistemas InteligentesMaria JuliaAún no hay calificaciones
- Control II - TanqueDocumento6 páginasControl II - TanqueMaria JuliaAún no hay calificaciones
- Practico 9 - TecmeDocumento19 páginasPractico 9 - TecmeMaria JuliaAún no hay calificaciones
- 1Documento7 páginas1Maria JuliaAún no hay calificaciones
- Problemas de DobladoDocumento17 páginasProblemas de DobladoMaria JuliaAún no hay calificaciones
- Lab2 - Control IDocumento1 páginaLab2 - Control IMaria JuliaAún no hay calificaciones
- Grupo - TecmeDocumento24 páginasGrupo - TecmeMaria JuliaAún no hay calificaciones
- Practico 9 - TecmeDocumento7 páginasPractico 9 - TecmeMaria Julia100% (2)
- ExamenDocumento6 páginasExamenMaria JuliaAún no hay calificaciones
- Normas Aga 9Documento24 páginasNormas Aga 9Maria JuliaAún no hay calificaciones
- Lab 4 - InteligentesDocumento21 páginasLab 4 - InteligentesMaria JuliaAún no hay calificaciones
- Proyecto 2Documento12 páginasProyecto 2Maria JuliaAún no hay calificaciones
- Lab 3 Sistemas EmbebidosDocumento15 páginasLab 3 Sistemas EmbebidosMaria JuliaAún no hay calificaciones
- Lab-2 - Sistemas EmbebidosDocumento7 páginasLab-2 - Sistemas EmbebidosMaria JuliaAún no hay calificaciones
- Segundo Parcial 2021 Copiar CopiarDocumento9 páginasSegundo Parcial 2021 Copiar CopiarMaria JuliaAún no hay calificaciones
- Parcial 1Documento2 páginasParcial 1Maria JuliaAún no hay calificaciones
- Grupo 1 - Diseño de Maquinas - RodamientosDocumento12 páginasGrupo 1 - Diseño de Maquinas - RodamientosMaria JuliaAún no hay calificaciones
- DecepticonsDocumento25 páginasDecepticonsMaria JuliaAún no hay calificaciones
- Grupo N2Documento12 páginasGrupo N2Maria JuliaAún no hay calificaciones
- Modelación, Simulación y Control de Un Levitador NeumáticoDocumento9 páginasModelación, Simulación y Control de Un Levitador NeumáticoAdalberto LazariniAún no hay calificaciones
- Tarea 1 - Sistemas EmbebidosDocumento7 páginasTarea 1 - Sistemas EmbebidosMaria JuliaAún no hay calificaciones
- Cálculo y Diseño de La Hélice Óptima para Turbinas Eólicas2Documento48 páginasCálculo y Diseño de La Hélice Óptima para Turbinas Eólicas2tg91002009Aún no hay calificaciones
- MANOVA y PerMANOVA Con RStudioDocumento15 páginasMANOVA y PerMANOVA Con RStudioDIEGO ANDRES CADENA DURAN100% (1)
- Primera Entrega Del Trabajo Final-Grupo 7Documento8 páginasPrimera Entrega Del Trabajo Final-Grupo 7Christian Romero PeñafielAún no hay calificaciones
- Habilitacion Variable ComplejaDocumento1 páginaHabilitacion Variable ComplejaEDUART ARLEY MEDINA AGUIRREAún no hay calificaciones
- Solución Práctica de Problemas en 7 Pasos SegúnDocumento4 páginasSolución Práctica de Problemas en 7 Pasos SegúnjposadaAún no hay calificaciones
- Algoritmo para El Calculo de Areas y Volumenes GA2 240201528 AA4 EV01 El Que Ya Habia Enviar Que Ya Estaba CalificadoDocumento12 páginasAlgoritmo para El Calculo de Areas y Volumenes GA2 240201528 AA4 EV01 El Que Ya Habia Enviar Que Ya Estaba CalificadoSebastián Castrillón CifuentesAún no hay calificaciones
- Manual de Usuario V8PlusDocumento2 páginasManual de Usuario V8PlusNicolas Ried RondanelliAún no hay calificaciones
- Presentacion Corporativa Netlan 2021 VfinalDocumento15 páginasPresentacion Corporativa Netlan 2021 VfinalKristian Martinez GutierrezAún no hay calificaciones
- Modelo Población y MuestraDocumento3 páginasModelo Población y MuestraDayane Bravo SalasAún no hay calificaciones
- 01 Memoria Descriptiva CanalDocumento22 páginas01 Memoria Descriptiva CanalDaniel Ortega CotrinaAún no hay calificaciones
- Entrada Morat AlanDocumento1 páginaEntrada Morat AlanMarii SanchezAún no hay calificaciones
- UntitledDocumento5 páginasUntitledcrisvillaraAún no hay calificaciones
- Videoclase Gerencia de Operaciones, Semana 2. DAHH BlendedDocumento27 páginasVideoclase Gerencia de Operaciones, Semana 2. DAHH BlendedJERSIN JULINHO ZEVALLOS ARZAPALOAún no hay calificaciones
- Ejercicio de TorneriaDocumento6 páginasEjercicio de TorneriaRICHARD MAYORGA CHAVEZAún no hay calificaciones
- Unidad III. Factorización de Polinomios. Matemática IDocumento17 páginasUnidad III. Factorización de Polinomios. Matemática Ijhonestevez1101Aún no hay calificaciones
- GEyAD - EA1. Ejemplo de EA1 Reporte de InvestigaciónDocumento22 páginasGEyAD - EA1. Ejemplo de EA1 Reporte de InvestigaciónChorinho Atkinson LaurieAún no hay calificaciones
- Escenario 3 Versión Definitiva (1) - 1Documento6 páginasEscenario 3 Versión Definitiva (1) - 1Juan Fernández SánchezAún no hay calificaciones
- El Correo Electrónico y Sus AplicacionesDocumento10 páginasEl Correo Electrónico y Sus AplicacionesAdrian Garcia SarabiaAún no hay calificaciones
- Factura N 5130Documento2 páginasFactura N 5130heartsbrokeenAún no hay calificaciones
- Monitorización de Procesos - Navarro Romero Erika YamilethDocumento8 páginasMonitorización de Procesos - Navarro Romero Erika YamilethErika Navarro RomeroAún no hay calificaciones
- Porta FolioDocumento36 páginasPorta FoliodanielleAún no hay calificaciones
- ICI - T3 Redes de ComunicacionesDocumento43 páginasICI - T3 Redes de ComunicacionesfrankyAún no hay calificaciones
- Ecosistemas Digitales 2Documento10 páginasEcosistemas Digitales 2Sonia Velosa G.Aún no hay calificaciones
- Qué Es La MercadotecniaDocumento3 páginasQué Es La MercadotecniaJose Lizandro Medina CalderonAún no hay calificaciones
- ExxxxDocumento2 páginasExxxxFernanda SalinasAún no hay calificaciones
- AA4 - Lógica Matemática y de ProgramaciónDocumento5 páginasAA4 - Lógica Matemática y de Programaciónerick_coAún no hay calificaciones
- Sesión de Arte - Decoramos Nuestro Espacio Por El Dia Del Logro - 7 de JulioDocumento4 páginasSesión de Arte - Decoramos Nuestro Espacio Por El Dia Del Logro - 7 de Juliorosario vives100% (2)
- Cuestionario Generalidades de AuditoriaDocumento3 páginasCuestionario Generalidades de AuditoriaCarlosArturoBlandonJaramilloAún no hay calificaciones
- Modelos de Design Thinking - Blogs - GestiónDocumento14 páginasModelos de Design Thinking - Blogs - GestiónVictor CaceresAún no hay calificaciones
- Sciu-163 - Actividad Entregable - 002Documento2 páginasSciu-163 - Actividad Entregable - 002Jhon Eduard Mandujano OréAún no hay calificaciones
- Compendio Proyectos GTE Construccion Enero 2022Documento128 páginasCompendio Proyectos GTE Construccion Enero 2022LUCIO QUIROZ MILLAAún no hay calificaciones