También podría gustarte
- Segunda Unidad Parte CDocumento15 páginasSegunda Unidad Parte CDario AgramonteAún no hay calificaciones
- Tema 9 Parte1-MinDocumento36 páginasTema 9 Parte1-MinAlberto GarcíaAún no hay calificaciones
- Clase 13 Modelado y Representacion en El Espacio de EstadosDocumento18 páginasClase 13 Modelado y Representacion en El Espacio de EstadosCARLOS MORALESAún no hay calificaciones
- Sesión 4-Discretizacion PDFDocumento4 páginasSesión 4-Discretizacion PDFgorkantolinprraAún no hay calificaciones
- Semana 8 - Convolucion y Serie de FourierDocumento40 páginasSemana 8 - Convolucion y Serie de FourierGustavo Quispe InocenteAún no hay calificaciones
- Análisis Señales SistemasDocumento28 páginasAnálisis Señales SistemasGEORGE AR�MIS VASQUEZ LLANOSAún no hay calificaciones
- Control Modermo Espacio de EstadosDocumento9 páginasControl Modermo Espacio de EstadosElmer RchAún no hay calificaciones
- Proakis Ejercicios Cap 2Documento12 páginasProakis Ejercicios Cap 2Anonymous yeTg3p1faHAún no hay calificaciones
- Sistemas Lineales PapelDocumento31 páginasSistemas Lineales PapelantoAún no hay calificaciones
- Examen Final Control II EE648O 2021-IDocumento3 páginasExamen Final Control II EE648O 2021-IAlex Samuel Ludeña HuamaniAún no hay calificaciones
- XXX Espacio de EstadosDocumento28 páginasXXX Espacio de EstadosRicardo VilchezAún no hay calificaciones
- Clase 6 Unidad 2 Modelo de Espacio de EstadoDocumento4 páginasClase 6 Unidad 2 Modelo de Espacio de EstadoMilton VariosAún no hay calificaciones
- Ecuaciones de EstadoDocumento8 páginasEcuaciones de Estado...Aún no hay calificaciones
- Modelar y Simular Sistemas DiscretosDocumento29 páginasModelar y Simular Sistemas DiscretosPaco BejarAún no hay calificaciones
- Espacios de Estados LinealesDocumento15 páginasEspacios de Estados LinealesFreddy GarciaAún no hay calificaciones
- Modelo Estados Controladores v2Documento16 páginasModelo Estados Controladores v2David MadrigalAún no hay calificaciones
- 2018-2 Taller1-Transformaciones-SenalesDocumento2 páginas2018-2 Taller1-Transformaciones-SenalesCrizz CRAún no hay calificaciones
- 2018-2 Taller1-Transformaciones-Senales PDFDocumento2 páginas2018-2 Taller1-Transformaciones-Senales PDFCrizz CRAún no hay calificaciones
- Cuarta Practica Domiciliaria1Documento16 páginasCuarta Practica Domiciliaria1robertoAún no hay calificaciones
- Taller SeñalesDocumento3 páginasTaller SeñalesSebastián Medina RaigozaAún no hay calificaciones
- Leccion 02Documento29 páginasLeccion 02Álvaro Martínez SánchezAún no hay calificaciones
- Controlabilidad y ObservabilidadDocumento35 páginasControlabilidad y Observabilidaddeaj8710100% (1)
- CM 4 N2 Práctica8 1512822Documento14 páginasCM 4 N2 Práctica8 1512822Paola de LeonAún no hay calificaciones
- Espacio de EstadosDocumento50 páginasEspacio de EstadosDerlis Romero50% (4)
- 3ra Control IIcharapaDocumento17 páginas3ra Control IIcharapaRaul AdautoAún no hay calificaciones
- Representación en espacio de estados de un sistema electrónicoDocumento5 páginasRepresentación en espacio de estados de un sistema electrónicoliz andradeAún no hay calificaciones
- Trabajo de Investigacion 1.0 (Sca131)Documento4 páginasTrabajo de Investigacion 1.0 (Sca131)Carlos JavierAún no hay calificaciones
- Sistema ecuaciones diferenciales primer ordenDocumento19 páginasSistema ecuaciones diferenciales primer ordenRuben JPAún no hay calificaciones
- Capítulo 2Documento53 páginasCapítulo 2jesusAún no hay calificaciones
- Lab1 Solucioin Ecuaciones Diferenciales Lineales y No LinealesDocumento2 páginasLab1 Solucioin Ecuaciones Diferenciales Lineales y No LinealesJonathan David Cabrera TorresAún no hay calificaciones
- Laboratorio2 - MT227 - 2020Documento8 páginasLaboratorio2 - MT227 - 2020MB Legends100% (1)
- Análisis de señales y sistemas: Deber 4Documento2 páginasAnálisis de señales y sistemas: Deber 4Anderson RomeroAún no hay calificaciones
- Sistemas Dinamico Etapa 4Documento31 páginasSistemas Dinamico Etapa 4Ivan Bolaño100% (1)
- Guia1 ProblemasRecomendadosDocumento5 páginasGuia1 ProblemasRecomendadosJesusA GalvisAún no hay calificaciones
- Representacion de Los Sistemas de Control Mediante Variables de EstadoDocumento15 páginasRepresentacion de Los Sistemas de Control Mediante Variables de EstadoJoseAún no hay calificaciones
- Actividad Analisis de SistemasDocumento2 páginasActividad Analisis de SistemasYesid PeñaAún no hay calificaciones
- Descripcion de Variables de EstadoDocumento54 páginasDescripcion de Variables de EstadoLeazah Adacnom SoretsellabAún no hay calificaciones
- Modelado en El Espacio de EstadosDocumento5 páginasModelado en El Espacio de EstadosGuardado EduardoAún no hay calificaciones
- Análisis de señales y sistemas en ingeniería biomédicaDocumento8 páginasAnálisis de señales y sistemas en ingeniería biomédicaAdriana RodríguezAún no hay calificaciones
- Ejercio 4 Punto D - Angel VasquezDocumento8 páginasEjercio 4 Punto D - Angel Vasquezangel vasquezAún no hay calificaciones
- Control IIDocumento124 páginasControl IIMILTON CABRERAAún no hay calificaciones
- Funciones vectoriales y cálculo vectorialDocumento3 páginasFunciones vectoriales y cálculo vectorialhernancAún no hay calificaciones
- 19-20 ExtraordinariaDocumento3 páginas19-20 Extraordinariajosuecevallos.gAún no hay calificaciones
- Tema 5 UnlockedDocumento42 páginasTema 5 UnlockedMartín Ezequiel Pedrozo RocaAún no hay calificaciones
- Muestreo Submuestreo y SobremuestreoDocumento26 páginasMuestreo Submuestreo y SobremuestreoВиши АгиларAún no hay calificaciones
- Control Digital - IIDocumento46 páginasControl Digital - IIMichael Isael Altamirano CuevaAún no hay calificaciones
- Actividad 3 - GNDocumento11 páginasActividad 3 - GNMarco SabillonAún no hay calificaciones
- AbellDocumento2 páginasAbellRafael Jiménez GuerraAún no hay calificaciones
- Memorias Del Congreso Nacional de Control Automático 2016, Querétaro, México, Septiembre 28-30, 2016Documento1 páginaMemorias Del Congreso Nacional de Control Automático 2016, Querétaro, México, Septiembre 28-30, 2016Julio Alberto Guzman RabasaAún no hay calificaciones
- Esta Ciii3pcDocumento8 páginasEsta Ciii3pcRaul AdautoAún no hay calificaciones
- PresentaciónDocumento29 páginasPresentaciónDIEGO ALEJANDRO CASTILLO RAYMEAún no hay calificaciones
- Clase 03Documento35 páginasClase 03Giancarlo Salazar YaringañoAún no hay calificaciones
- Guia EjerciciosDocumento36 páginasGuia EjerciciosRao RaoAún no hay calificaciones
- Sistemas de ecuaciones diferenciales linealesDocumento68 páginasSistemas de ecuaciones diferenciales linealesPatriciaLlacsaLázaroAún no hay calificaciones
- Tarea 2 - Representacion en Espacio de EstadosDocumento6 páginasTarea 2 - Representacion en Espacio de EstadosOscar SantellanoAún no hay calificaciones
- AL1819 ExtraordinarioDocumento2 páginasAL1819 Extraordinariooriginal goofAún no hay calificaciones
- Fundamentos de Señales y Sistemas Capitulo 1Documento7 páginasFundamentos de Señales y Sistemas Capitulo 1Rogel AlfaroAún no hay calificaciones
- Autosintonia de Controladores Borrosos Utilizando Tecnicas Clasicas Basadas en Reguladores PidDocumento9 páginasAutosintonia de Controladores Borrosos Utilizando Tecnicas Clasicas Basadas en Reguladores PidJorge Magaña NuñezAún no hay calificaciones
- Mat043 Clase 07 Esperanza de Variables AleatoriasDocumento6 páginasMat043 Clase 07 Esperanza de Variables AleatoriasJorge Magaña NuñezAún no hay calificaciones
- Apuntes de Maquinas Electric AsDocumento139 páginasApuntes de Maquinas Electric AsalberheryahooAún no hay calificaciones
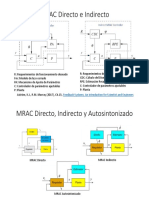
- MRAC Directo e IndirectoDocumento2 páginasMRAC Directo e IndirectoJorge Magaña NuñezAún no hay calificaciones
- Impuestos y Excedentes PDFDocumento21 páginasImpuestos y Excedentes PDFJorge Magaña NuñezAún no hay calificaciones
- CostosDocumento34 páginasCostosIsrael Aguirre VillaAún no hay calificaciones
- ELO-281 - Quizz Nº1 PDFDocumento2 páginasELO-281 - Quizz Nº1 PDFJorge Magaña NuñezAún no hay calificaciones
- Para Chuparse Los Dedos. CocinaDocumento43 páginasPara Chuparse Los Dedos. Cocinabanafsayi100% (1)
- S3. El Reactor - Bobinas AcopladasDocumento6 páginasS3. El Reactor - Bobinas AcopladasJorge Magaña NuñezAún no hay calificaciones
- S3-El reactor-Aplicaciones-Medicion Parametros-TransductoresDocumento18 páginasS3-El reactor-Aplicaciones-Medicion Parametros-TransductoresJorge Magaña NuñezAún no hay calificaciones
- S1-Circuito MagneticoDocumento20 páginasS1-Circuito MagneticoJorge Magaña NuñezAún no hay calificaciones
- S4 - El TransformadorDocumento9 páginasS4 - El TransformadorJorge Magaña NuñezAún no hay calificaciones
- Gui A 1Documento24 páginasGui A 1maritzapotAún no hay calificaciones
- Libro de Cocina-Kitchenaid PDFDocumento127 páginasLibro de Cocina-Kitchenaid PDFjuan cruzAún no hay calificaciones
- Ayudantía 3 - Relatividad Especial (Ma11-12)Documento5 páginasAyudantía 3 - Relatividad Especial (Ma11-12)Jorge Magaña NuñezAún no hay calificaciones
- Gui A 1Documento24 páginasGui A 1maritzapotAún no hay calificaciones
- S2-El Reactor - Modelado Sistema R-LDocumento19 páginasS2-El Reactor - Modelado Sistema R-LJorge Magaña NuñezAún no hay calificaciones
- Relatividad - Ayudantía FIS1Documento1 páginaRelatividad - Ayudantía FIS1Jorge Magaña NuñezAún no hay calificaciones
- Ayudantía 1. Ondas Electromagnéticas (Martes 11-12)Documento6 páginasAyudantía 1. Ondas Electromagnéticas (Martes 11-12)Jorge Magaña NuñezAún no hay calificaciones
- Guia Transformadores y MagnetizacionDocumento42 páginasGuia Transformadores y MagnetizacionMatiasRiquelmeGrezAún no hay calificaciones
- 1-Ejercicios de OndasDocumento4 páginas1-Ejercicios de OndasJorge Magaña NuñezAún no hay calificaciones
- La Filosofia de HouseDocumento126 páginasLa Filosofia de HouseRaúl E. Porras Lavalle100% (8)
- Inteligencia EmocionalDocumento1 páginaInteligencia EmocionalJorge Magaña NuñezAún no hay calificaciones
- El Hombre Que CalculabaDocumento242 páginasEl Hombre Que Calculabacarmelo_maduro100% (9)
- Movimiento ObreroDocumento4 páginasMovimiento ObreroJorge Magaña NuñezAún no hay calificaciones
- El Dinosaurio AnacletoDocumento1 páginaEl Dinosaurio AnacletoJorge Magaña NuñezAún no hay calificaciones
- El Lenguaje de Programación C#Documento260 páginasEl Lenguaje de Programación C#infobits75% (4)
- Curso de Posgrado: Trabajo FinalDocumento21 páginasCurso de Posgrado: Trabajo FinalHugo MoralesAún no hay calificaciones
- Diseño de ejes: optimización de materiales y configuración geométricaDocumento81 páginasDiseño de ejes: optimización de materiales y configuración geométricaMateo Violet100% (1)
- Et01250-Cable Optico Cfoa-As-Ra, Tubo Único y Autosoportado para Vanos de Hasta 120 Metros - Modelo FicDocumento4 páginasEt01250-Cable Optico Cfoa-As-Ra, Tubo Único y Autosoportado para Vanos de Hasta 120 Metros - Modelo FicCésar Idrogo FactorAún no hay calificaciones
- Historia de La TrigonometríaDocumento11 páginasHistoria de La TrigonometríaBëlälcäzär JohännäAún no hay calificaciones
- Factorización de polinomios y álgebra para medir terrenosDocumento2 páginasFactorización de polinomios y álgebra para medir terrenosRosa MaríaAún no hay calificaciones
- Conceptos Básicos de Geometría para 1° de SecDocumento7 páginasConceptos Básicos de Geometría para 1° de Secmirson Santiago D.Aún no hay calificaciones
- Practica ReologíaDocumento13 páginasPractica ReologíaOscar RodriguezAún no hay calificaciones
- TFG Alvaro Guzman BautistaDocumento98 páginasTFG Alvaro Guzman Bautistaluigi12244Aún no hay calificaciones
- Estatica Puentes BaileyDocumento24 páginasEstatica Puentes BaileyAnthonyMarin100% (2)
- Diseño Calculos de Encofrado PDFDocumento249 páginasDiseño Calculos de Encofrado PDFIng. Alejandro Valencia HerreraAún no hay calificaciones
- Sem 03 HT Derivada Implicita. PDFDocumento2 páginasSem 03 HT Derivada Implicita. PDFWilin Ney Gonzales IdrogoAún no hay calificaciones
- Martinez Reyna VictorAlfonso M19S2AI4Documento8 páginasMartinez Reyna VictorAlfonso M19S2AI4Alemakey ReynaAún no hay calificaciones
- Cálculo I: Preparación para el cálculoDocumento54 páginasCálculo I: Preparación para el cálculoa_g_a09Aún no hay calificaciones
- Prueba Final de Eléctricidad 10 HRDocumento3 páginasPrueba Final de Eléctricidad 10 HRJorge MoralesAún no hay calificaciones
- Guia de Estudio de Función AfínDocumento8 páginasGuia de Estudio de Función AfínDr.finkelchsteinAún no hay calificaciones
- HiperbolaDocumento16 páginasHiperbolaPedro P Huamani AroneAún no hay calificaciones
- Solucionario Prueba de Desarrollo 1 2022 10 NRC 12970Documento3 páginasSolucionario Prueba de Desarrollo 1 2022 10 NRC 12970ROLY YUNIOR GOMEZ PAZAún no hay calificaciones
- Método RULA PDFDocumento14 páginasMétodo RULA PDFGeomar Mendez67% (3)
- Guía Lineas Equipotenciales y Campo ElectricoDocumento4 páginasGuía Lineas Equipotenciales y Campo ElectricoDANIEL FELIPE HENAO FLORAún no hay calificaciones
- Relaciones y Funciones-EjerciciosDocumento3 páginasRelaciones y Funciones-EjerciciosRafael DuránAún no hay calificaciones
- 1 - Montaje de Las Piezas en El TornoDocumento3 páginas1 - Montaje de Las Piezas en El TornoJeimy YepesAún no hay calificaciones
- Clase 3-Balances Energía EIQ543Documento21 páginasClase 3-Balances Energía EIQ543Sebastian Andres MuñozAún no hay calificaciones
- Zill-Series 12Documento1 páginaZill-Series 12Rodney Aguilar MendezAún no hay calificaciones
- La Tecnica de Richard FeynmanDocumento6 páginasLa Tecnica de Richard Feynmancesarbatista1367% (3)
- TALLER DE BIOLOGÍA Origen de La VidaDocumento4 páginasTALLER DE BIOLOGÍA Origen de La VidaMateoAún no hay calificaciones
- EspigonesDocumento8 páginasEspigonesFrank CtAún no hay calificaciones
- Metrología científica dimensionalDocumento39 páginasMetrología científica dimensionalRosinaldo Huanaco SuycoAún no hay calificaciones
- Momentos de Un Par de FuerzasDocumento5 páginasMomentos de Un Par de FuerzasEmanuelAún no hay calificaciones
- Estudio de Suelos Silo LATACUNGADocumento14 páginasEstudio de Suelos Silo LATACUNGABado Mau MayorgaAún no hay calificaciones
- EVA - 11 EscolarDocumento2 páginasEVA - 11 EscolarBravo Fuentes EstefanyAún no hay calificaciones