También podría gustarte
- Old Fashioned SweetieDocumento58 páginasOld Fashioned SweetieViviane VentureAún no hay calificaciones
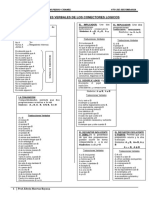
- Conectores Logicos.Documento1 páginaConectores Logicos.Edwiin Huertas100% (1)
- Trabajo de Investigación ContaminaciónDocumento49 páginasTrabajo de Investigación ContaminaciónMiltonBM0% (1)
- Forma y Función en ArquitecturaDocumento156 páginasForma y Función en ArquitecturaSantiago Villacrés100% (1)
- Teoría de Decisiones & Herramientas de Teoría de DecisionesDocumento85 páginasTeoría de Decisiones & Herramientas de Teoría de DecisionesJesús Miguel Gastelum Alvarado100% (1)
- Helen Fisher Porqué Amamos y EngañamosDocumento333 páginasHelen Fisher Porqué Amamos y EngañamosSandra Vera100% (1)
- Métodos Fundamentales de Economía Matemática, 4ta Edición, Alpha ChiangDocumento4 páginasMétodos Fundamentales de Economía Matemática, 4ta Edición, Alpha ChiangNoemi Mamani MamaniAún no hay calificaciones
- Ecuaciones Diferenciales de Primer Orden.Documento43 páginasEcuaciones Diferenciales de Primer Orden.JancAún no hay calificaciones
- Tip0s de Ecuaci0nes Diferenciales Lineal H0m0genea de Primer 0rden y de Segund0 0rdenDocumento5 páginasTip0s de Ecuaci0nes Diferenciales Lineal H0m0genea de Primer 0rden y de Segund0 0rdenMichael AbreuAún no hay calificaciones
- Ecuaciones Diferenciales de Primer OrdenDocumento41 páginasEcuaciones Diferenciales de Primer OrdenJuan Carlos Bejarano CuestaAún no hay calificaciones
- U2 M04 T01 - RP - (Tangentes)Documento11 páginasU2 M04 T01 - RP - (Tangentes)Luis Anthony Cadillo HuamanAún no hay calificaciones
- Ecuaciones Diferenciales de Segundo Orden. Aplicaciones y TallerDocumento40 páginasEcuaciones Diferenciales de Segundo Orden. Aplicaciones y Tallerjose ozunaAún no hay calificaciones
- Integral Definida4 2015-02 Usach Parametrica - NuevoDocumento12 páginasIntegral Definida4 2015-02 Usach Parametrica - NuevoPablo BarahonaAún no hay calificaciones
- Ecuacion en Diferencias - Primer OrdenDocumento5 páginasEcuacion en Diferencias - Primer OrdenSilvana ZaraiAún no hay calificaciones
- Calculo en Diferencias DiscretasDocumento14 páginasCalculo en Diferencias DiscretasJavi TolentinoAún no hay calificaciones
- Capitulo 4 Ano 2010 (Analisis Tensorial)Documento40 páginasCapitulo 4 Ano 2010 (Analisis Tensorial)Jorge Luis Díaz BlasAún no hay calificaciones
- Matematicas para Economistas Capitulo 6Documento23 páginasMatematicas para Economistas Capitulo 6Alvaro ChevalierAún no hay calificaciones
- Ecuaciones Diferenciales de Segundo Orden. Aplicaciones y TallerDocumento40 páginasEcuaciones Diferenciales de Segundo Orden. Aplicaciones y TallerWilliam SánchezAún no hay calificaciones
- FMMP312 s2 GomezDocumento11 páginasFMMP312 s2 Gomezlomejor delalifeAún no hay calificaciones
- Clase 6Documento6 páginasClase 6Paola Aristizabal CorreaAún no hay calificaciones
- Geometría Vectorial Unidad 3Documento47 páginasGeometría Vectorial Unidad 3FEDE G LOPERAAún no hay calificaciones
- Semana 2 EDDocumento33 páginasSemana 2 EDANDERSON RAMOS MAGALLANESAún no hay calificaciones
- Cal CuloDocumento10 páginasCal Culoyeferson10.yangaliAún no hay calificaciones
- Funcion VectorialDocumento24 páginasFuncion VectorialLenin RojasAún no hay calificaciones
- Cuestionario Del Capitulo 13Documento5 páginasCuestionario Del Capitulo 13Jose Antonio VazquezAún no hay calificaciones
- Sesion 6 Longitud de ArcoDocumento5 páginasSesion 6 Longitud de ArcoJeidi QuinteroAún no hay calificaciones
- FMMA215 s4 GomezDocumento11 páginasFMMA215 s4 GomezVictor Matias Vega ValenciaAún no hay calificaciones
- 2 Transformada de Laplace 2021Documento36 páginas2 Transformada de Laplace 2021guadaAún no hay calificaciones
- Actividad 1 EcuacionesDocumento5 páginasActividad 1 EcuacionesLeidy ArdilaAún no hay calificaciones
- Semana 2 EDDocumento32 páginasSemana 2 EDLeo C GAún no hay calificaciones
- Ecuaciones Diferenciales de Primeer Orden PDFDocumento30 páginasEcuaciones Diferenciales de Primeer Orden PDFFrangelys AbrahamAún no hay calificaciones
- Funciones Vectoriales de Una Variable RealDocumento10 páginasFunciones Vectoriales de Una Variable RealVazquez nieto Jorge AlbertoAún no hay calificaciones
- Tema 1Documento49 páginasTema 1David BermudezAún no hay calificaciones
- Tp07-Am2 2021 MSDocumento5 páginasTp07-Am2 2021 MSLUCAS GOMEZAún no hay calificaciones
- Guia EDODocumento11 páginasGuia EDOPaola GoitíaAún no hay calificaciones
- Ecuaciones Diferenciales Aplicadas, 1ra Edición, Fidel Villca, La Paz BoliviaDocumento22 páginasEcuaciones Diferenciales Aplicadas, 1ra Edición, Fidel Villca, La Paz BoliviaNoemi Mamani MamaniAún no hay calificaciones
- Infografia Curvas ParametricasDocumento1 páginaInfografia Curvas ParametricasJuan DavidAún no hay calificaciones
- Vectores Tangente Normal BinormalDocumento4 páginasVectores Tangente Normal BinormalNick ̶A̶y̶m̶a̶r̶Aún no hay calificaciones
- Clase #15. Cambio de Variables en Integrales DoblesDocumento8 páginasClase #15. Cambio de Variables en Integrales DoblesfacuAún no hay calificaciones
- Análisis Matemático II-1Documento16 páginasAnálisis Matemático II-1Avril Bolondi MedinaAún no hay calificaciones
- Tecnica CuantitativaDocumento7 páginasTecnica CuantitativaFabian VeraAún no hay calificaciones
- Sección 10.2 Cálculo Con Curvas Paramétricas 2Documento1 páginaSección 10.2 Cálculo Con Curvas Paramétricas 2Javier LeónAún no hay calificaciones
- Curvas ParametricasDocumento1 páginaCurvas ParametricasJuan DavidAún no hay calificaciones
- Tema 47Documento22 páginasTema 47TekitoAún no hay calificaciones
- Aranda - Formulario - EDODocumento2 páginasAranda - Formulario - EDOAileron_MajereAún no hay calificaciones
- 3 - Dorisgon - ALPO4 TL TareasDocumento2 páginas3 - Dorisgon - ALPO4 TL TareasErwing PlataAún no hay calificaciones
- Matematicas Divertidas T 47Documento15 páginasMatematicas Divertidas T 47Adoracion Garriguez100% (1)
- Unidad 5 de Albebra Casi TerminadaDocumento15 páginasUnidad 5 de Albebra Casi TerminadaRoberto Boyka CruzAún no hay calificaciones
- Thomas Una Variable 13e Cap11Documento53 páginasThomas Una Variable 13e Cap11Omar Cruz MaquedaAún no hay calificaciones
- S12-Integral de LíneaDocumento33 páginasS12-Integral de LíneadavidAún no hay calificaciones
- Derivada DireccionalDocumento23 páginasDerivada DireccionalSusan Mayela Pardo CcoiccaAún no hay calificaciones
- Algebra Lineal Taller 5 Transformaciones Lineales y Valores y Vectores PropiosDocumento314 páginasAlgebra Lineal Taller 5 Transformaciones Lineales y Valores y Vectores PropiosFelipe Chaves DelgadilloAún no hay calificaciones
- Tarea Calculo II ResumenDocumento2 páginasTarea Calculo II ResumenXIOMARA ISABEL AYQUIPA JIHUAÑAAún no hay calificaciones
- Funciones Vectoriales de Variable RealDocumento12 páginasFunciones Vectoriales de Variable RealyordifranAún no hay calificaciones
- 01 2.1 Ap PDFDocumento7 páginas01 2.1 Ap PDFJocelyn Aravena VelardeAún no hay calificaciones
- Sesión 03 AVTSF - Vector Tangente Unitario, Normal PrincipalDocumento18 páginasSesión 03 AVTSF - Vector Tangente Unitario, Normal PrincipalPatricia PomaAún no hay calificaciones
- Oscilador Armónico, Amortiguado y ForzadoDocumento9 páginasOscilador Armónico, Amortiguado y ForzadoUnSimpleUsuarioAún no hay calificaciones
- UNIDAD II 1ro 2013. AbrilDocumento26 páginasUNIDAD II 1ro 2013. AbrilNerimar IbarraAún no hay calificaciones
- Analisis Matematico III VectoresDocumento15 páginasAnalisis Matematico III VectoresChristianFIAún no hay calificaciones
- Cengel Repaso de Ecuaciones DiferencialesDocumento5 páginasCengel Repaso de Ecuaciones DiferencialesPerla Monroy100% (1)
- Derivadas ParcialesDocumento73 páginasDerivadas ParcialesJohan Romero RomeroAún no hay calificaciones
- Aula 1612Documento18 páginasAula 1612Joan Enrique Velarde AparicioAún no hay calificaciones
- Stewart - Subtema 3.7Documento4 páginasStewart - Subtema 3.7isaias hernandezAún no hay calificaciones
- Análisis Matemático II - Derivadas (Funciones de Variables Múltiples)Documento134 páginasAnálisis Matemático II - Derivadas (Funciones de Variables Múltiples)carlosAún no hay calificaciones
- Transformaciones LinealesDocumento15 páginasTransformaciones LinealesJosé Francisco Caamal PechAún no hay calificaciones
- Clase 7,2Documento8 páginasClase 7,2Paola Aristizabal CorreaAún no hay calificaciones
- Clase 6Documento6 páginasClase 6Paola Aristizabal CorreaAún no hay calificaciones
- Dinamica Económica 16.4Documento5 páginasDinamica Económica 16.4Paola Aristizabal CorreaAún no hay calificaciones
- Modelo Oferta Demanda Continuo Especulacion IIIDocumento10 páginasModelo Oferta Demanda Continuo Especulacion IIIPaola Aristizabal CorreaAún no hay calificaciones
- Revista Filopóiesis. Año 1. Nº1. 2022Documento20 páginasRevista Filopóiesis. Año 1. Nº1. 2022Colectivo Filopóiesis100% (2)
- Seminario Urologia MBCDocumento13 páginasSeminario Urologia MBCMaria Bautista ContrerasAún no hay calificaciones
- Taller de EjerciciosDocumento3 páginasTaller de EjerciciosDaniela OsorioAún no hay calificaciones
- Cantar de Roldán (I)Documento2 páginasCantar de Roldán (I)RociprofeAún no hay calificaciones
- Merleau-Ponty - La Percepción Del Prójimo en El Niño - 1era ParteDocumento41 páginasMerleau-Ponty - La Percepción Del Prójimo en El Niño - 1era ParteVictoria BianchiAún no hay calificaciones
- Robocode 2Documento7 páginasRobocode 2jmedarzAún no hay calificaciones
- El Yo Acuso de Pablo NerudaDocumento5 páginasEl Yo Acuso de Pablo NerudaOscar Dante Conejeros E.Aún no hay calificaciones
- INFRAORBITARIODocumento3 páginasINFRAORBITARIOpatriciaAún no hay calificaciones
- Relación Entre Ética y PoliticaDocumento3 páginasRelación Entre Ética y PoliticaJorge mario Gañan DelgadoAún no hay calificaciones
- Trabajo Del Dia Viernes PDFDocumento204 páginasTrabajo Del Dia Viernes PDFJosé Luis Nonalaya VillogasAún no hay calificaciones
- El Aumento, Reducción, Exoneración y Extinción Del Derecho AlimentarioDocumento3 páginasEl Aumento, Reducción, Exoneración y Extinción Del Derecho Alimentarioronaldo gabriel gomez salvatierraAún no hay calificaciones
- Desarrollo A Escala HumanaDocumento1 páginaDesarrollo A Escala HumanaJuan Sebastian Vargas RodriguezAún no hay calificaciones
- La Penologia y Sus DerivadosDocumento14 páginasLa Penologia y Sus DerivadosmaryAún no hay calificaciones
- Lecto Escritura 2019-2Documento16 páginasLecto Escritura 2019-2PaulaAún no hay calificaciones
- ECA-MC-C05 Criterios para La Eval de La Norma INTE-ISOIEC 17021 V15Documento59 páginasECA-MC-C05 Criterios para La Eval de La Norma INTE-ISOIEC 17021 V15luisAún no hay calificaciones
- FTP GND 002Documento1 páginaFTP GND 002Josbin Alexander Hurtado ReyesAún no hay calificaciones
- Judith Filc Sobre Marta TrabaDocumento8 páginasJudith Filc Sobre Marta TrabataniaAún no hay calificaciones
- El CerebroDocumento16 páginasEl CerebroYamerylis AyalaAún no hay calificaciones
- Lme2 PDocumento48 páginasLme2 PDIANA CALDERÓNAún no hay calificaciones
- Actividad 3 de Derecho Civil ViDocumento20 páginasActividad 3 de Derecho Civil ViᎬᎠᎶᎯᏒᎠᎾ ᏨᎯᏕᎿᏒᎬᏝᏝᎾᏁAún no hay calificaciones
- Investigacion de Transferencia de CalorDocumento10 páginasInvestigacion de Transferencia de CalorMario FarfanAún no hay calificaciones
- Triptico AnsiedadDocumento2 páginasTriptico AnsiedadMichelleGutiérrezUgarteAún no hay calificaciones
- Ejercicio de Declinacion de 10 Sust de Segunda Declinación-Nom Sing en - Er-Sin TraducciónDocumento1 páginaEjercicio de Declinacion de 10 Sust de Segunda Declinación-Nom Sing en - Er-Sin TraducciónmilsAún no hay calificaciones
- Plan de Accion IE MANUEL SCORZA TORRESDocumento9 páginasPlan de Accion IE MANUEL SCORZA TORRESHector Vilcatoma FloresAún no hay calificaciones