También podría gustarte
- Interpolación bilineal: Mejora de la resolución y claridad de la imagen mediante interpolación bilinealDe EverandInterpolación bilineal: Mejora de la resolución y claridad de la imagen mediante interpolación bilinealAún no hay calificaciones
- Mec Dos Noc Apuntes Sep 20Documento2 páginasMec Dos Noc Apuntes Sep 20Martin Estores GalirAún no hay calificaciones
- Mec Dos Noc Apuntes Sep 22Documento2 páginasMec Dos Noc Apuntes Sep 22Martin Estores GalirAún no hay calificaciones
- Cuantica 1Documento5 páginasCuantica 1Mario Jesus Mamani HuayllaniAún no hay calificaciones
- Puente Levadizo Calculo VectorialDocumento7 páginasPuente Levadizo Calculo Vectorialmaria100% (3)
- Clase 14 v3 - BJT Polarizacion Pt. 2Documento17 páginasClase 14 v3 - BJT Polarizacion Pt. 2Vale ITreAún no hay calificaciones
- Soluciones Tarea GeometríaDocumento5 páginasSoluciones Tarea GeometríaCarlosAún no hay calificaciones
- AlvarezValentina - T11.U7.Recta y PlanoDocumento11 páginasAlvarezValentina - T11.U7.Recta y PlanoValeAún no hay calificaciones
- Polinomios de LagrangeDocumento5 páginasPolinomios de LagrangeCeleo EscoberAún no hay calificaciones
- Dinamica Inversa Brazo RoboticoDocumento4 páginasDinamica Inversa Brazo RoboticoWilliam WillAún no hay calificaciones
- Comp. Tareas CorregidasDocumento111 páginasComp. Tareas CorregidasValeAún no hay calificaciones
- Actividad 12 Conferencia Integrales de Línea Escalares y VectorialesDocumento40 páginasActividad 12 Conferencia Integrales de Línea Escalares y VectorialesJanier Rodríguez LópezAún no hay calificaciones
- Metodo de Region AlcanzableDocumento15 páginasMetodo de Region AlcanzableAngelo VarelaAún no hay calificaciones
- Pauta Prueba Solemne 1 - Cal 3Documento4 páginasPauta Prueba Solemne 1 - Cal 3sebastianAún no hay calificaciones
- 7 - Rectas en El PlanoDocumento13 páginas7 - Rectas en El PlanoFederico TorresAún no hay calificaciones
- Lógica de Relé Híbrido - ProteccionDocumento11 páginasLógica de Relé Híbrido - ProteccionGustavo CentenoAún no hay calificaciones
- La BVIEWDocumento10 páginasLa BVIEWIlder Juan Ticona MamaniAún no hay calificaciones
- PDS Lab y Taller FinalDocumento2 páginasPDS Lab y Taller FinalCristian AcevedoAún no hay calificaciones
- Taller1 SolucionDocumento32 páginasTaller1 SolucionJuan Diego Plaza GómezAún no hay calificaciones
- EjerciciosMain ActualDocumento71 páginasEjerciciosMain ActualFernando RiveraAún no hay calificaciones
- Laboratorio 4 - ANÁLISIS DE POSICIÓN DE UN MECANISMO CON CORREDERADocumento19 páginasLaboratorio 4 - ANÁLISIS DE POSICIÓN DE UN MECANISMO CON CORREDERAJorge Luis Cruz NievesAún no hay calificaciones
- Lectura - Citas Textuales y Uso de Los Gestores de ReferenciaDocumento6 páginasLectura - Citas Textuales y Uso de Los Gestores de Referenciasofia mendozaAún no hay calificaciones
- Análisis y Síntesis de Mecanismos Con Aplicaciones - (PG 119 - 119) PDFDocumento1 páginaAnálisis y Síntesis de Mecanismos Con Aplicaciones - (PG 119 - 119) PDFJesus D. Pardo RicaldayAún no hay calificaciones
- UntitledDocumento14 páginasUntitledSUSANA SANCHEZAún no hay calificaciones
- Semana 4 - ESTUDIANTE PDFDocumento36 páginasSemana 4 - ESTUDIANTE PDFLuis Angel Bejar GilAún no hay calificaciones
- Fisica 2Documento29 páginasFisica 2Ronaldo Aldair RAAún no hay calificaciones
- Guía Lab. N°1 - Matlab 2023Documento13 páginasGuía Lab. N°1 - Matlab 2023jahil zeballosAún no hay calificaciones
- Rectas y PropiedadesDocumento2 páginasRectas y PropiedadesSalomón Ching BriceñoAún no hay calificaciones
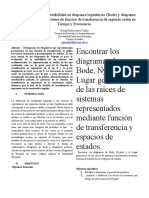
- Diagramas de Bode en MatlabDocumento2 páginasDiagramas de Bode en MatlabLuis MedinaAún no hay calificaciones
- Mecanica Cuantica 2Documento35 páginasMecanica Cuantica 2Pedro DanielAún no hay calificaciones
- UNIDAD 1 LA RECTA de LLR 2021Documento12 páginasUNIDAD 1 LA RECTA de LLR 2021Diego Armando AlvarezAún no hay calificaciones
- Apunte Tensores PDFDocumento11 páginasApunte Tensores PDFDavid Buitrago CeballosAún no hay calificaciones
- Apunte TensoresDocumento11 páginasApunte TensoresPoly GonzalezAún no hay calificaciones
- Apunte Tensores PDFDocumento11 páginasApunte Tensores PDFkay sierraAún no hay calificaciones
- CODIFICACIONDocumento29 páginasCODIFICACIONPablo Andres BarbechoAún no hay calificaciones
- Diagrama de Bode y de NyquistDocumento3 páginasDiagrama de Bode y de NyquistAntonio ZamoranoAún no hay calificaciones
- BBBBBBDocumento17 páginasBBBBBBAdrián CasillasAún no hay calificaciones
- Tríptico - Funciones CuadráticasDocumento2 páginasTríptico - Funciones CuadráticasJenjen Jenny Yini100% (1)
- TRÍPTICODocumento2 páginasTRÍPTICOJenjen Jenny YiniAún no hay calificaciones
- Preparatorio 2 Instrumentaci N-2-5Documento4 páginasPreparatorio 2 Instrumentaci N-2-5ALEX JAVIER CHIGUANO LLUMIQUINGAAún no hay calificaciones
- Practica 2 CFDocumento5 páginasPractica 2 CFTeofilo GrandaAún no hay calificaciones
- Introduccion Cálculo VectorialDocumento4 páginasIntroduccion Cálculo VectorialLorenzo F. Villca AguilarAún no hay calificaciones
- Regresion LinealDocumento17 páginasRegresion LinealLeonelaAún no hay calificaciones
- Practica 1 Ejercicio 2Documento9 páginasPractica 1 Ejercicio 2Javier Fernando Ventura ZuñigaAún no hay calificaciones
- Httpsgrado - Pol.una - Pypluginfile.php421797mod Resourcecontent10Tarea206 PDFDocumento5 páginasHttpsgrado - Pol.una - Pypluginfile.php421797mod Resourcecontent10Tarea206 PDFStephenAún no hay calificaciones
- Valoracion de BonosDocumento33 páginasValoracion de BonosMaria ConisllaAún no hay calificaciones
- Guia Parametricas Vectores 2015Documento2 páginasGuia Parametricas Vectores 2015conocimiento12Aún no hay calificaciones
- Trabajo F1 - ICA - v2018 - Impar PDFDocumento2 páginasTrabajo F1 - ICA - v2018 - Impar PDFFabricio Benavente100% (1)
- Audio-Clases 3 y 4 (202215 KB-RE)Documento26 páginasAudio-Clases 3 y 4 (202215 KB-RE)cursostangAún no hay calificaciones
- Taller Estabilidad de Sistemas Realimentados 18-3 PDFDocumento5 páginasTaller Estabilidad de Sistemas Realimentados 18-3 PDFRoss SilvaAún no hay calificaciones
- Circuit Iii - Laboratorio 2Documento5 páginasCircuit Iii - Laboratorio 2Fabian HernandezAún no hay calificaciones
- Plan de Trabajo - CV - U2 - 2023Documento6 páginasPlan de Trabajo - CV - U2 - 2023marcos uribeAún no hay calificaciones
- Informe ACA 3 - Circuito RCDocumento4 páginasInforme ACA 3 - Circuito RCDaniel DarztAún no hay calificaciones
- Region AlcanzableDocumento8 páginasRegion AlcanzableSebastian VegaAún no hay calificaciones
- SSE-FI-EJ01-VECTORES (Suma de Vectores)Documento3 páginasSSE-FI-EJ01-VECTORES (Suma de Vectores)Franklin Muñoz PalominoAún no hay calificaciones
- Lab05 2020-1Documento15 páginasLab05 2020-1Peter Daniel Condor ReyesAún no hay calificaciones
- LABORATORIODocumento8 páginasLABORATORIOSTIVEN SEBASTIAN AMAYA MARQUEZAún no hay calificaciones
- Notación Teoría de ColasDocumento2 páginasNotación Teoría de ColasJuan David Lamus ParraAún no hay calificaciones
- 03 Operaciones Con VectoresDocumento9 páginas03 Operaciones Con VectorescarlosAún no hay calificaciones
- Análisis y Síntesis de Mecanismos Con Aplicaciones - (PG 120 - 125) PDFDocumento6 páginasAnálisis y Síntesis de Mecanismos Con Aplicaciones - (PG 120 - 125) PDFJesus D. Pardo RicaldayAún no hay calificaciones
- Física 5to Secundaria 3Documento22 páginasFísica 5to Secundaria 3Metade Marvel A ChAún no hay calificaciones
- Semana 1 CINEMATICA - DE - UNA - PARTICULADocumento57 páginasSemana 1 CINEMATICA - DE - UNA - PARTICULAMIGUEL DIOGENES RAMOS RODRIGUEZAún no hay calificaciones
- Tarea No. 2 FísicaDocumento3 páginasTarea No. 2 FísicaRodrigo SalgueroAún no hay calificaciones
- Aplicación de La Ley de TorricelliDocumento6 páginasAplicación de La Ley de TorricelliDixon Antonio MaradiagaAún no hay calificaciones
- Electricidad Teórico Práctica IIIDocumento307 páginasElectricidad Teórico Práctica IIICyberRAD RAULAún no hay calificaciones
- Paralelo Cepunt 2017 Ii Vectores y Cinematica I KeplerDocumento8 páginasParalelo Cepunt 2017 Ii Vectores y Cinematica I KeplerJackeline Carrión TAún no hay calificaciones
- Guia Trabajo Energía JoseLuisDocumento10 páginasGuia Trabajo Energía JoseLuisMariaAún no hay calificaciones
- Talleres de Varios GradosDocumento7 páginasTalleres de Varios GradosOLMES GORDILLO VILLANUEVAAún no hay calificaciones
- Cinemática Vectorial (II)Documento2 páginasCinemática Vectorial (II)Carmen Ruiz DuránAún no hay calificaciones
- Optimización de Estaciones de Bombeo en Riego A La Demanda PDFDocumento14 páginasOptimización de Estaciones de Bombeo en Riego A La Demanda PDFjgarciaAún no hay calificaciones
- Aquasec - Manual PDFDocumento14 páginasAquasec - Manual PDFMorodh KuagmireAún no hay calificaciones
- Problemas de Física 1Documento2 páginasProblemas de Física 1Alan BritoAún no hay calificaciones
- Tema Muestra TecnologiaDocumento50 páginasTema Muestra Tecnologiamaria100% (1)
- Clase 04 Mas y OscilacionesDocumento3 páginasClase 04 Mas y Oscilacionesdilmer delgado herreraAún no hay calificaciones
- Manuale CNC20Documento87 páginasManuale CNC20josuaseiAún no hay calificaciones
- Flujo en Medios PorososDocumento12 páginasFlujo en Medios PorososJohn Junior Ubillus DelgadoAún no hay calificaciones
- Preguntas de RepasoDocumento4 páginasPreguntas de RepasoChristopher Leonardo Perez EsperanzaAún no hay calificaciones
- Metodo de NewmarkDocumento1123 páginasMetodo de NewmarkIda Liliana Ichpas LimaAún no hay calificaciones
- 02 Prueba Física Fuerza y Movimiento 2° Medio DifícilDocumento4 páginas02 Prueba Física Fuerza y Movimiento 2° Medio DifícilWinston ContulianoAún no hay calificaciones
- PARTEMISHELLDocumento2 páginasPARTEMISHELLIvan Alexander Carchipulla AuquiAún no hay calificaciones
- Movimiento ParabolicoDocumento5 páginasMovimiento ParabolicoDiana Katherine Montes MerchanAún no hay calificaciones
- Fisica Moderna 1Documento90 páginasFisica Moderna 1Anonymous JIoaxmAún no hay calificaciones
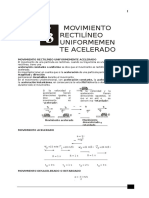
- Actividad 2 Unidad 3. Movimiento Rectil Neo Uniformemente VariadoDocumento3 páginasActividad 2 Unidad 3. Movimiento Rectil Neo Uniformemente VariadoElin Morales0% (1)
- Practico 4 Cinemática 12021Documento4 páginasPractico 4 Cinemática 12021Duran Pacheco Leonardo Jared100% (1)
- Mru Ejercicios Resueltos PDFDocumento6 páginasMru Ejercicios Resueltos PDFmonf0Aún no hay calificaciones
- Fisica Cuantica - ProblemasDocumento9 páginasFisica Cuantica - ProblemasantonesproAún no hay calificaciones
- MagnetismoDocumento29 páginasMagnetismoSevnt MoranAún no hay calificaciones
- 1e.-Cinematica de La Particula Tito Vilchez PDFDocumento34 páginas1e.-Cinematica de La Particula Tito Vilchez PDFJuan ArnaoAún no hay calificaciones
- Física, Leyes de NewtonDocumento17 páginasFísica, Leyes de NewtonasdAún no hay calificaciones
- Movimiento SemiparabolicoDocumento3 páginasMovimiento Semiparabolicocamilabr44Aún no hay calificaciones
- Fundamentos de matemática: Introducción al nivel universitarioDe EverandFundamentos de matemática: Introducción al nivel universitarioCalificación: 3 de 5 estrellas3/5 (9)
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Cálculo integral: Técnicas de integraciónDe EverandCálculo integral: Técnicas de integraciónCalificación: 4 de 5 estrellas4/5 (8)
- Guía práctica para la refracción ocularDe EverandGuía práctica para la refracción ocularCalificación: 5 de 5 estrellas5/5 (2)
- Había una vez el átomo: O cómo los científicos imaginan lo invisibleDe EverandHabía una vez el átomo: O cómo los científicos imaginan lo invisibleCalificación: 5 de 5 estrellas5/5 (3)
- La Física - Aventura del pensamientoDe EverandLa Física - Aventura del pensamientoCalificación: 4.5 de 5 estrellas4.5/5 (9)
- Entrelazamiento cuántico y sincronicidad. Campos de fuerza, no localidad, percepciones extrasensoriales. Las sorprendentes propiedades de la física cuántica.De EverandEntrelazamiento cuántico y sincronicidad. Campos de fuerza, no localidad, percepciones extrasensoriales. Las sorprendentes propiedades de la física cuántica.Calificación: 4.5 de 5 estrellas4.5/5 (9)
- Los mágicos números del Doctor Matrix: Conviértete en un maestro de los númerosDe EverandLos mágicos números del Doctor Matrix: Conviértete en un maestro de los númerosCalificación: 5 de 5 estrellas5/5 (2)
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalDe EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalCalificación: 5 de 5 estrellas5/5 (3)
- Mentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraDe EverandMentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraCalificación: 4.5 de 5 estrellas4.5/5 (5)
- La magia de los números: 136 recreaciones aritméticas y geométricasDe EverandLa magia de los números: 136 recreaciones aritméticas y geométricasCalificación: 1 de 5 estrellas1/5 (1)
- Visualización: Cambie su vida en cuatro semanas utilizando la ley de atracciónDe EverandVisualización: Cambie su vida en cuatro semanas utilizando la ley de atracciónCalificación: 5 de 5 estrellas5/5 (18)
- Física mecánica: Nivelación para estudiantes universitariosDe EverandFísica mecánica: Nivelación para estudiantes universitariosCalificación: 4 de 5 estrellas4/5 (7)
- Matemáticas financieras y evaluación de proyectos: Segunda ediciónDe EverandMatemáticas financieras y evaluación de proyectos: Segunda ediciónAún no hay calificaciones
- Mecánica cuántica para principiantesDe EverandMecánica cuántica para principiantesCalificación: 3.5 de 5 estrellas3.5/5 (5)
- Química orgánica: ejercicios de aplicaciónDe EverandQuímica orgánica: ejercicios de aplicaciónCalificación: 5 de 5 estrellas5/5 (3)
- Los gatos sueñan con física cuántica y los perros con universos paralelos: Mecánica cuántica para todas las edadesDe EverandLos gatos sueñan con física cuántica y los perros con universos paralelos: Mecánica cuántica para todas las edadesCalificación: 4.5 de 5 estrellas4.5/5 (18)
- Estadística básica: Introducción a la estadística con RDe EverandEstadística básica: Introducción a la estadística con RCalificación: 5 de 5 estrellas5/5 (8)
- La Guía Definitiva en Matemáticas para el Ingreso a la UniversidadDe EverandLa Guía Definitiva en Matemáticas para el Ingreso a la UniversidadCalificación: 4 de 5 estrellas4/5 (11)
- La teoría de casi todo: El modelo estándar, triunfo no reconocido de la física modernaDe EverandLa teoría de casi todo: El modelo estándar, triunfo no reconocido de la física modernaCalificación: 4 de 5 estrellas4/5 (32)
- Universo cuántico y sincronicidad. La visión antrópica. Coincidencias significativas. El inconsciente colectivo. El papel de las pandemias en el camino evolutivo humano.De EverandUniverso cuántico y sincronicidad. La visión antrópica. Coincidencias significativas. El inconsciente colectivo. El papel de las pandemias en el camino evolutivo humano.Aún no hay calificaciones