También podría gustarte
- Metodología de proyecto sismorresistente de edificiosDe EverandMetodología de proyecto sismorresistente de edificiosCalificación: 5 de 5 estrellas5/5 (1)
- 1ra Und Cinem Part Mov Curvilineo Parte 2 2022Documento39 páginas1ra Und Cinem Part Mov Curvilineo Parte 2 2022Jahayra Solanch Chancayauri CondorchoaAún no hay calificaciones
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoDe EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoCalificación: 4.5 de 5 estrellas4.5/5 (12)
- 5ta - UND - CINEMATICA - EN - EL - PLANO - DE - UN - C.R.PARTE 1 2021Documento26 páginas5ta - UND - CINEMATICA - EN - EL - PLANO - DE - UN - C.R.PARTE 1 2021dylanAún no hay calificaciones
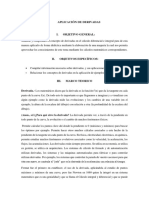
- Informe DerivadasDocumento4 páginasInforme Derivadascristian67% (6)
- 1ra Und Cinem Part Mov Curvilineo Parte 1 2022Documento32 páginas1ra Und Cinem Part Mov Curvilineo Parte 1 2022Edgar Paul Vera ChamorroAún no hay calificaciones
- Movimiento curvilíneo y cinemática de partículasDocumento284 páginasMovimiento curvilíneo y cinemática de partículasApex gamerAún no hay calificaciones
- Cálculo de volúmenes de sólidos de revoluciónDocumento23 páginasCálculo de volúmenes de sólidos de revoluciónJoker100% (1)
- Fase 3 - Camilo PaipillaDocumento9 páginasFase 3 - Camilo PaipillaMiguel Angel Mendigaño ArismendyAún no hay calificaciones
- Practica 12Documento3 páginasPractica 12Angel Paul LaraAún no hay calificaciones
- Torción y CurvaturaDocumento4 páginasTorción y CurvaturaLEONARDO CRISTIAN LUNA BEJARAún no hay calificaciones
- INFORME 2 - MulticuerpoDocumento17 páginasINFORME 2 - MulticuerpoLuis Eduardo Huaynate AlmonacidAún no hay calificaciones
- Aplicaciones del cálculo vectorial en ingenieríaDocumento8 páginasAplicaciones del cálculo vectorial en ingenieríafranz rojas machadoAún no hay calificaciones
- 2da Und Cinetica Part Parte1 2022Documento97 páginas2da Und Cinetica Part Parte1 2022Jahayra Solanch Chancayauri CondorchoaAún no hay calificaciones
- Cinética de una partícula: Leyes de NewtonDocumento50 páginasCinética de una partícula: Leyes de NewtondylanAún no hay calificaciones
- Trabajo de Investigación-Bma02Documento10 páginasTrabajo de Investigación-Bma02MACALUPU RAMIREZ ANDRIY ALDAIRAún no hay calificaciones
- Aplicacion Del Calculo Integral en La Ingenieria CivilDocumento8 páginasAplicacion Del Calculo Integral en La Ingenieria CivilDeysi Casa RojasAún no hay calificaciones
- Reporte de Investigacion 3Y4Documento19 páginasReporte de Investigacion 3Y4Arath AvilesAún no hay calificaciones
- Aplicacion Integral Ingenieria 3Documento11 páginasAplicacion Integral Ingenieria 3Abel Morillo Minaya100% (1)
- Dinamica BeerDocumento23 páginasDinamica BeerYeampier Pariente100% (1)
- Practica 8 2019Documento2 páginasPractica 8 2019Miguel Angel Sedano CcamaAún no hay calificaciones
- Trabajo Investigacion de CalculoDocumento19 páginasTrabajo Investigacion de Calculosofia barreraAún no hay calificaciones
- Proyecto S5 - Unidad 1Documento13 páginasProyecto S5 - Unidad 1ALEX GENARO COTRINA ESCOBALAún no hay calificaciones
- Ensayo Aplicacion Del Calculo Multivariable en La IngenieriaDocumento16 páginasEnsayo Aplicacion Del Calculo Multivariable en La IngenieriaAlex Dimora DimoraAún no hay calificaciones
- Investigación Vectores DuránDocumento12 páginasInvestigación Vectores DuránAlexander DuránAún no hay calificaciones
- Relacion Entre Las Integrales Con La Ingenieria IndustrialDocumento6 páginasRelacion Entre Las Integrales Con La Ingenieria IndustrialRenato QuiñonesAún no hay calificaciones
- PC4 - GeometriaDocumento23 páginasPC4 - GeometriaOvaldina Tamar Chilquillo GonzalesAún no hay calificaciones
- U3-Ada1-Martínez Rodríguez Karen IsabelDocumento12 páginasU3-Ada1-Martínez Rodríguez Karen IsabelkarenisAún no hay calificaciones
- Aplicaciones Del Calculo IntegralDocumento8 páginasAplicaciones Del Calculo IntegralLina María Pineda MuñozAún no hay calificaciones
- Actividad 6 - AplicacionesDocumento9 páginasActividad 6 - Aplicacionesjuan camilo palacio gutierrezAún no hay calificaciones
- Aplicaciones de La DerivadaDocumento18 páginasAplicaciones de La DerivadaAngela Thalia MaguiñaAún no hay calificaciones
- Elementos FinitosDocumento32 páginasElementos FinitosMiguel VenturaAún no hay calificaciones
- Integrales MultiplesDocumento19 páginasIntegrales MultiplesJosezhito Rojas DiburgaAún no hay calificaciones
- Aplicaciones de las integrales en ingenieríaDocumento16 páginasAplicaciones de las integrales en ingenieríaYuleidys pestana sotoAún no hay calificaciones
- Sílabo MC338 - DinamicaDocumento4 páginasSílabo MC338 - DinamicaDon Intercad100% (1)
- TÉCNICAS DE INTEGRACIÓN DOBLEDocumento7 páginasTÉCNICAS DE INTEGRACIÓN DOBLELupis Arvizu PichardoAún no hay calificaciones
- If - Algebra LinealDocumento10 páginasIf - Algebra LinealDIEGO ALVARO ANDRADE HERRERAAún no hay calificaciones
- Cálculo del impulso y cantidad de movimiento de una caja sometida a una fuerza horizontal variableDocumento20 páginasCálculo del impulso y cantidad de movimiento de una caja sometida a una fuerza horizontal variablejorge espinozaAún no hay calificaciones
- CAPITULO 0-CombinadoDocumento6 páginasCAPITULO 0-CombinadoSILVIA GABRIELA PUMA AYSAAún no hay calificaciones
- Integrales Aplicadas 98396 Downloadable 4764240Documento22 páginasIntegrales Aplicadas 98396 Downloadable 4764240David CanazaAún no hay calificaciones
- Coordenadas CilindricasDocumento30 páginasCoordenadas CilindricasRicardo AndreAún no hay calificaciones
- Canal Rectangular Diseño 2 Unidad GrandaDocumento8 páginasCanal Rectangular Diseño 2 Unidad GrandaFabrizzio Granda EscuderoAún no hay calificaciones
- Trabajo de Calculo EDDocumento16 páginasTrabajo de Calculo EDBemjy Junior Rodriguez BermudezAún no hay calificaciones
- Propiedades de Los Determinantes y Su Aplicacion en La Ingenieria CivilDocumento10 páginasPropiedades de Los Determinantes y Su Aplicacion en La Ingenieria CivilALAN JESITH SHUGULI REINOSOAún no hay calificaciones
- Cálculo T3Documento34 páginasCálculo T3Clauu Martinez PortalAún no hay calificaciones
- Dinamica 06 CinemáticaTridimensionalCuerpoRigidoDocumento10 páginasDinamica 06 CinemáticaTridimensionalCuerpoRigidoSebastian Granados SolarteAún no hay calificaciones
- Laboratorio N°3 Física-MecánicaDocumento17 páginasLaboratorio N°3 Física-Mecánicafasantana95Aún no hay calificaciones
- Aplicaciones Del Análisis Vectorial en La Ingeniería y CienciasDocumento9 páginasAplicaciones Del Análisis Vectorial en La Ingeniería y CienciasTirofijo19 SanpaAún no hay calificaciones
- Mecanica Proyecto Modular Martin BarrazaDocumento3 páginasMecanica Proyecto Modular Martin BarrazaMärtin BarrazaAún no hay calificaciones
- Ejercicios Dinamica EstructuralDocumento35 páginasEjercicios Dinamica Estructuraljose granados100% (1)
- Lógica y Programación 8Documento7 páginasLógica y Programación 8Luis García OlivosAún no hay calificaciones
- Aplicaciones Del Álgebra LinealDocumento16 páginasAplicaciones Del Álgebra LinealAzulitoAún no hay calificaciones
- Memorias+Academia+Journals+Celaya+2018+ +tomo+20Documento166 páginasMemorias+Academia+Journals+Celaya+2018+ +tomo+20Guillermo San Román TajonarAún no hay calificaciones
- Ecuaciones Diferenciales Actividad Evaluativa Eje 2Documento19 páginasEcuaciones Diferenciales Actividad Evaluativa Eje 2Yadir Martinez DazaAún no hay calificaciones
- Cálculo integral en mecatrónicaDocumento3 páginasCálculo integral en mecatrónicaGil OrozcoAún no hay calificaciones
- Sólidos de revolución y cálculo de volumenDocumento28 páginasSólidos de revolución y cálculo de volumenElvis ToapantaAún no hay calificaciones
- GFPI-F-135 Guia 4 Resumen Trigonometria Numeros ComplejosDocumento7 páginasGFPI-F-135 Guia 4 Resumen Trigonometria Numeros Complejosjustyon53Aún no hay calificaciones
- Trabajo Práctico #1 - 2021Documento4 páginasTrabajo Práctico #1 - 2021Agustin GonzalezAún no hay calificaciones
- pc1 CalculoDocumento16 páginaspc1 Calculonery andrea humberth mariateguiAún no hay calificaciones
- Componente Investigacion Primer Parcial Tovar CristianDocumento11 páginasComponente Investigacion Primer Parcial Tovar CristianCristian IncaAún no hay calificaciones
- 2022 Práctica #5 - Reducción de Sistemas de FuerzasDocumento2 páginas2022 Práctica #5 - Reducción de Sistemas de FuerzasSebasAx24Aún no hay calificaciones
- Practica Nº3 - Equilibrio de Una Partícula en 3DDocumento2 páginasPractica Nº3 - Equilibrio de Una Partícula en 3DEsther Yanet Yanapa ZapanaAún no hay calificaciones
- 2022 Practica #2 - Equilibrio de Una Partícula en 2D y Momento Respecto A Un PuntoDocumento2 páginas2022 Practica #2 - Equilibrio de Una Partícula en 2D y Momento Respecto A Un PuntoSebasAx24Aún no hay calificaciones
- DATA VehiculosDocumento9 páginasDATA VehiculosSebasAx24Aún no hay calificaciones
- Tema 1 - Parte 1Documento24 páginasTema 1 - Parte 1SebasAx24Aún no hay calificaciones
- Conclusiones Ensayo Banco HidráulicoDocumento1 páginaConclusiones Ensayo Banco HidráulicoSebasAx24Aún no hay calificaciones
- Actividad #1 - UcsmDocumento3 páginasActividad #1 - UcsmSebasAx24Aún no hay calificaciones
- Tema 1 - Parte 2Documento13 páginasTema 1 - Parte 2SebasAx24Aún no hay calificaciones
- Practica Nº7 Limites de ConsistenciaDocumento6 páginasPractica Nº7 Limites de ConsistenciaSebasAx24Aún no hay calificaciones
- Demostracion Del Teorema de La Ecuacion de ReynoldsDocumento6 páginasDemostracion Del Teorema de La Ecuacion de ReynoldsSebasAx24Aún no hay calificaciones
- Practicas de DinámicaDocumento9 páginasPracticas de DinámicaSebasAx24Aún no hay calificaciones
- Practica 1 - Ing - CivilDocumento8 páginasPractica 1 - Ing - CivilSebasAx24Aún no hay calificaciones
- Demostracion Del Teorema de La Ecuacion de ReynoldsDocumento6 páginasDemostracion Del Teorema de La Ecuacion de ReynoldsSebasAx24Aún no hay calificaciones
- 9na - UND - VIBRACIONES MECÁNICAS 2021 - PARTE 1Documento40 páginas9na - UND - VIBRACIONES MECÁNICAS 2021 - PARTE 1SebasAx24Aún no hay calificaciones
- 7ma - UND - CINÉTICA EN EL PLANO DE UN CUERPO RÍGIDO - TRABAJO Y ENERGÍADocumento21 páginas7ma - UND - CINÉTICA EN EL PLANO DE UN CUERPO RÍGIDO - TRABAJO Y ENERGÍASebasAx24Aún no hay calificaciones
- Modulo de Yung EjemplosDocumento9 páginasModulo de Yung EjemplosAlexander Pulido MarínAún no hay calificaciones
- Cuestionario e Conservacion de EnergiaDocumento7 páginasCuestionario e Conservacion de EnergiaMiguel Tasayco100% (1)
- Balance de Cantidad de MovimientoDocumento11 páginasBalance de Cantidad de MovimientoBenjamín GarnicaAún no hay calificaciones
- Práctica de resistencia de materiales con problemas resueltos usando datos personalesDocumento3 páginasPráctica de resistencia de materiales con problemas resueltos usando datos personalesNallely BarrozoAún no hay calificaciones
- Agitación y MezclaDocumento51 páginasAgitación y MezclaAnonymous GAB4gwAún no hay calificaciones
- Propuestos Maqhidra U3Documento4 páginasPropuestos Maqhidra U3Javier PosadaAún no hay calificaciones
- Capa Limite, Mapa ConceptualDocumento7 páginasCapa Limite, Mapa ConceptualOrlando Elera PurizagaAún no hay calificaciones
- 002.termodinámica. Conceptos y MagnitudesDocumento2 páginas002.termodinámica. Conceptos y MagnitudesAlberto PovedaAún no hay calificaciones
- Resistencia de materiales: Ejercicios de torsión, presión y esfuerzos compuestosDocumento2 páginasResistencia de materiales: Ejercicios de torsión, presión y esfuerzos compuestosCESAR ALEXANDER ZAVALETA RAMIREZAún no hay calificaciones
- CORAZADocumento3 páginasCORAZAVanessaAún no hay calificaciones
- Ejer Campo Magnetico y ElectromagnetismoDocumento3 páginasEjer Campo Magnetico y ElectromagnetismoMartaPonsMederosAún no hay calificaciones
- Coeficiente de Fricción ViscosaDocumento4 páginasCoeficiente de Fricción ViscosaEmmanuel PastorAún no hay calificaciones
- U2 EjerciciosDocumento113 páginasU2 EjerciciosCarlos Julio OsorioAún no hay calificaciones
- Deflexion de Una VigaDocumento4 páginasDeflexion de Una VigaLuis Ríos100% (1)
- Consolidado 2Documento17 páginasConsolidado 2ALBERTO CASTILLO VILCHEZAún no hay calificaciones
- Problemas Cap 2 ADocumento35 páginasProblemas Cap 2 AArleth Ticona100% (1)
- Fiee UnacDocumento16 páginasFiee UnacGodo SánchezAún no hay calificaciones
- Principio e Hipotesis de Resistencia de MaterialesDocumento3 páginasPrincipio e Hipotesis de Resistencia de MaterialesRafa Negrito100% (1)
- Impulso y Cantidad de MomentoDocumento7 páginasImpulso y Cantidad de MomentoliberenanelsondelrodeoAún no hay calificaciones
- Primera Ley de La TermodinamicaDocumento18 páginasPrimera Ley de La TermodinamicaYorvi LliqueAún no hay calificaciones
- Los Potenciales ElectromagneticosDocumento38 páginasLos Potenciales ElectromagneticosOscar DiceAún no hay calificaciones
- Análisis Macroscópico - 1Documento20 páginasAnálisis Macroscópico - 1el jeremiasAún no hay calificaciones
- Capítulo 22Documento2 páginasCapítulo 22Emiliano SimonAún no hay calificaciones
- Ipfl Lab N°2 Grupo 3Documento6 páginasIpfl Lab N°2 Grupo 3Jhon Brandon Rojas YauriAún no hay calificaciones
- Reología en Fluidos de PerforacionDocumento24 páginasReología en Fluidos de PerforacionFranz Kevin Luna AguilarAún no hay calificaciones
- Generacion de TerremotosDocumento29 páginasGeneracion de TerremotosDennis AquinoAún no hay calificaciones
- Ejemplo 1 Zapata Corrida para Muro de CargaDocumento24 páginasEjemplo 1 Zapata Corrida para Muro de CargaSteven Alvarez100% (1)
- 2 Ejercicios Tema 3Documento2 páginas2 Ejercicios Tema 3Hever Marx ZambranoAún no hay calificaciones
- Presentación en Power Point. Aletas de Transferencia de Calor. Karlis SanojaDocumento16 páginasPresentación en Power Point. Aletas de Transferencia de Calor. Karlis SanojaJesus Leonardo Molina WefferAún no hay calificaciones
- S16.s3 - PPT Taller8Documento11 páginasS16.s3 - PPT Taller8Jotacheq NacionalAún no hay calificaciones
- INTRODUCCIÓN AL DERECHO: Materiales didácticos de Derecho Civil y TributarioDe EverandINTRODUCCIÓN AL DERECHO: Materiales didácticos de Derecho Civil y TributarioCalificación: 4 de 5 estrellas4/5 (5)
- Neurocuántica: La nueva frontera de la neurocienciaDe EverandNeurocuántica: La nueva frontera de la neurocienciaCalificación: 5 de 5 estrellas5/5 (1)
- Problemas de física general en un año olímpicoDe EverandProblemas de física general en un año olímpicoCalificación: 5 de 5 estrellas5/5 (1)
- Historia Universal: XXI capítulos fundamentalesDe EverandHistoria Universal: XXI capítulos fundamentalesCalificación: 4.5 de 5 estrellas4.5/5 (32)
- Entretejer espacios para aprender y convivir en el aulaDe EverandEntretejer espacios para aprender y convivir en el aulaCalificación: 5 de 5 estrellas5/5 (1)
- Física cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasDe EverandFísica cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasCalificación: 5 de 5 estrellas5/5 (4)
- Mil ejercicios de preparación física (2 Vol)De EverandMil ejercicios de preparación física (2 Vol)Calificación: 3 de 5 estrellas3/5 (5)
- Educar la atención: Cómo entrenar esta habilidad en niños y adultosDe EverandEducar la atención: Cómo entrenar esta habilidad en niños y adultosCalificación: 4.5 de 5 estrellas4.5/5 (10)
- La sabiduría del cuerpo: Recopilación de artículos de Moshe FeldenkraisDe EverandLa sabiduría del cuerpo: Recopilación de artículos de Moshe FeldenkraisCalificación: 4 de 5 estrellas4/5 (5)
- El Diseño Universal para el Aprendizaje: Educación para todos y prácticas de Enseñanza InclusivasDe EverandEl Diseño Universal para el Aprendizaje: Educación para todos y prácticas de Enseñanza InclusivasCalificación: 5 de 5 estrellas5/5 (2)
- El método de los elementos finitos: Un enfoque teórico prácticoDe EverandEl método de los elementos finitos: Un enfoque teórico prácticoCalificación: 3 de 5 estrellas3/5 (4)
- Guía práctica para la refracción ocularDe EverandGuía práctica para la refracción ocularCalificación: 5 de 5 estrellas5/5 (2)
- Emprendedores: La Aventura de Crear tu Propio CaminoDe EverandEmprendedores: La Aventura de Crear tu Propio CaminoCalificación: 4.5 de 5 estrellas4.5/5 (3)
- La guía definitiva en Matemáticas para el Ingreso al BachilleratoDe EverandLa guía definitiva en Matemáticas para el Ingreso al BachilleratoCalificación: 4.5 de 5 estrellas4.5/5 (9)
- Análisis De Una Práctica Docente: La Práctica Pedagógica Y La Visión De Una Docente NormalistaDe EverandAnálisis De Una Práctica Docente: La Práctica Pedagógica Y La Visión De Una Docente NormalistaAún no hay calificaciones
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalDe EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalCalificación: 5 de 5 estrellas5/5 (3)
- Fisicoquímica II: Materia, electricidad y magnetismo. Fuerzas y camposDe EverandFisicoquímica II: Materia, electricidad y magnetismo. Fuerzas y camposAún no hay calificaciones
- NIKOLA TESLA: Mis Inventos - AutobiografiaDe EverandNIKOLA TESLA: Mis Inventos - AutobiografiaCalificación: 4.5 de 5 estrellas4.5/5 (2)
- Proyectos de instalaciones eléctrica de baja tensiónDe EverandProyectos de instalaciones eléctrica de baja tensiónCalificación: 5 de 5 estrellas5/5 (1)
- Montessori para bebés: El enfoque Montessori desde el nacimiento hasta los 3 añosDe EverandMontessori para bebés: El enfoque Montessori desde el nacimiento hasta los 3 añosCalificación: 4.5 de 5 estrellas4.5/5 (24)
- Neuroeducación: ¿Cómo aprende el cerebro humano y cómo deberían enseñar los docentes?De EverandNeuroeducación: ¿Cómo aprende el cerebro humano y cómo deberían enseñar los docentes?Calificación: 5 de 5 estrellas5/5 (6)
- Física paso a paso: Más de 100 problemas resueltosDe EverandFísica paso a paso: Más de 100 problemas resueltosCalificación: 4 de 5 estrellas4/5 (12)