También podría gustarte
- Flexion de Vigas.Documento10 páginasFlexion de Vigas.Habith De LeonAún no hay calificaciones
- Ecuaciones diferenciales ingenieríaDocumento10 páginasEcuaciones diferenciales ingenieríaLuigi AndersonAún no hay calificaciones
- Aplicacion de Las Ecuacionesdiferenciales en La IngenieriacivilDocumento6 páginasAplicacion de Las Ecuacionesdiferenciales en La Ingenieriacivilantonio Gil AdrianzenAún no hay calificaciones
- Monografia Sobre La Aplicación de Las Ecuacionesdiferenciales en La IngenieriacivilDocumento6 páginasMonografia Sobre La Aplicación de Las Ecuacionesdiferenciales en La IngenieriacivilJasmir PonceAún no hay calificaciones
- pc1 CalculoDocumento16 páginaspc1 Calculonery andrea humberth mariateguiAún no hay calificaciones
- Rs 1er AporteDocumento11 páginasRs 1er AporteLUZMARINAAún no hay calificaciones
- Informe Sobre Aplicaciones de Ecuaciones DiferencialesDocumento10 páginasInforme Sobre Aplicaciones de Ecuaciones DiferencialesEmisario de los GorgonitasAún no hay calificaciones
- Aplicacion de Ecuaciones Diferrenciales en IngenieriaDocumento16 páginasAplicacion de Ecuaciones Diferrenciales en IngenieriaLuis Mario Quispe ChaconAún no hay calificaciones
- Espacios VectorialesDocumento39 páginasEspacios Vectoriales2023111208Aún no hay calificaciones
- Ecuaciones Diferenciales en Vigas PDFDocumento17 páginasEcuaciones Diferenciales en Vigas PDFBryanAún no hay calificaciones
- Aplicaciones de La Integral MultipleDocumento21 páginasAplicaciones de La Integral MultipleCmwUnapAún no hay calificaciones
- Integrales MultiplesDocumento19 páginasIntegrales MultiplesJosezhito Rojas DiburgaAún no hay calificaciones
- Aplicaciones de Ecuaciones Diferenciales en IngenieríaDocumento20 páginasAplicaciones de Ecuaciones Diferenciales en IngenieríaGersonAnguloMendozaAún no hay calificaciones
- Aplicaciones de Ecuaciones DiferencialesDocumento11 páginasAplicaciones de Ecuaciones DiferencialesJOSE ALBERTO QUINTANA SOLISAún no hay calificaciones
- Cálculo integral: Cuaderno de trabajo para preparatoriaDocumento133 páginasCálculo integral: Cuaderno de trabajo para preparatoriaCarvajal Luis JoseAún no hay calificaciones
- Ensayo de EcuacionesDocumento10 páginasEnsayo de EcuacionesFrank MarcAún no hay calificaciones
- BCMV U2 ContenidoDocumento26 páginasBCMV U2 ContenidoGuadalupe Ximena Real MuñozAún no hay calificaciones
- Producción Final de Análisis Matemático IDocumento12 páginasProducción Final de Análisis Matemático IYerdi Omar100% (3)
- Aplicaciones de Las Ecuaciones Diferenciales en La Ingenieria Civil.Documento15 páginasAplicaciones de Las Ecuaciones Diferenciales en La Ingenieria Civil.Erika HernándezAún no hay calificaciones
- Analis Vectorial - c33 Grupo (C) Rivera Caba Reynaldo - Farfan Ordoñez Elias-Meneces Maldonado Wilson - Cabrera Mamani Esther - Quiñones Salazar H.Documento34 páginasAnalis Vectorial - c33 Grupo (C) Rivera Caba Reynaldo - Farfan Ordoñez Elias-Meneces Maldonado Wilson - Cabrera Mamani Esther - Quiñones Salazar H.Wilson MenecesAún no hay calificaciones
- Aplicaciones de las ecuaciones diferenciales de primer orden en ingeniería civilDocumento20 páginasAplicaciones de las ecuaciones diferenciales de primer orden en ingeniería civilRicardo Huamanchumo EcheandiaAún no hay calificaciones
- Aplicacion de La Integral en La Ingenieria CivilDocumento11 páginasAplicacion de La Integral en La Ingenieria CivilMisael Mendoza50% (2)
- Proyecto EcuacionesDocumento21 páginasProyecto EcuacionesPriscila MoreiraAún no hay calificaciones
- Resortes y VigasDocumento19 páginasResortes y VigasluisAún no hay calificaciones
- Cuadernillo Cálculo IntegralDocumento56 páginasCuadernillo Cálculo Integralcata linazAún no hay calificaciones
- Concepto de Integral DefinidaDocumento9 páginasConcepto de Integral DefinidaJhon David Diaz GarciaAún no hay calificaciones
- Informe MetodosDocumento24 páginasInforme MetodosDavid G. MirandaAún no hay calificaciones
- Trabajo MonograficoDocumento36 páginasTrabajo MonograficoSebastian PatrickAún no hay calificaciones
- Ensayo Ecuaciones CvaDocumento20 páginasEnsayo Ecuaciones CvaWilson PanchanaAún no hay calificaciones
- Monografia de MatematicaDocumento43 páginasMonografia de MatematicaMarleneCortezAún no hay calificaciones
- Producto Academico Ii UnidadDocumento19 páginasProducto Academico Ii UnidadCARLOS ALBERTO LLAJA SOTOAún no hay calificaciones
- Cálculo infinitesimal y APPDocumento14 páginasCálculo infinitesimal y APPCarlos Abraham GómezAún no hay calificaciones
- Aplicacion de La Integral Con 1000 EjemplosDocumento8 páginasAplicacion de La Integral Con 1000 EjemplosRenato TribalAún no hay calificaciones
- Borrador Matematicas IIIDocumento28 páginasBorrador Matematicas IIIErick NavarreteAún no hay calificaciones
- Grupo 06 - Matematica Basica Ii - Trabajo de Investigación FormativaDocumento12 páginasGrupo 06 - Matematica Basica Ii - Trabajo de Investigación FormativaPARIONA SOSA ANA LIAAún no hay calificaciones
- Rotacional y Teorema de StokesDocumento16 páginasRotacional y Teorema de StokesKEVIN ECOS ALAAún no hay calificaciones
- GFPI-F-135 Guia 4 Resumen Trigonometria Numeros ComplejosDocumento7 páginasGFPI-F-135 Guia 4 Resumen Trigonometria Numeros Complejosjustyon53Aún no hay calificaciones
- TÉCNICAS DE INTEGRACIÓN DOBLEDocumento7 páginasTÉCNICAS DE INTEGRACIÓN DOBLELupis Arvizu PichardoAún no hay calificaciones
- La Derivada CuadernoDocumento33 páginasLa Derivada CuadernoChristian Lopez MendezAún no hay calificaciones
- Sólidos de revolución y cálculo de volumenDocumento28 páginasSólidos de revolución y cálculo de volumenElvis ToapantaAún no hay calificaciones
- Aplicacion Del Calculo Integral en La Ingenieria CivilDocumento8 páginasAplicacion Del Calculo Integral en La Ingenieria CivilDeysi Casa RojasAún no hay calificaciones
- Ecuaciones EmpíricasDocumento18 páginasEcuaciones EmpíricasCarlos González Ayala67% (3)
- Metodo de Area de MomentoDocumento25 páginasMetodo de Area de MomentoAlvaro Alonso Huacchillo CalleAún no hay calificaciones
- PC4 CalculoDocumento19 páginasPC4 CalculoLuz Araujo MantariAún no hay calificaciones
- Aaala Teoría Cualitativa Global en El PlanoDocumento7 páginasAaala Teoría Cualitativa Global en El PlanoGarcía Abdiel EduardoAún no hay calificaciones
- Ecuaciones DiferencialesDocumento24 páginasEcuaciones DiferencialesEDWIN ALVAREZ MAMAMNIAún no hay calificaciones
- Trabajo TefyDocumento10 páginasTrabajo Tefylessly muñozAún no hay calificaciones
- Informe Integral DefinidaDocumento15 páginasInforme Integral DefinidaDIEGO ALDAIR RIOS AVENDAÑOAún no hay calificaciones
- Funciones vectoriales: Introducción a funciones de varias variables y álgebra vectorialDocumento33 páginasFunciones vectoriales: Introducción a funciones de varias variables y álgebra vectorialjuan luis ibarra floresAún no hay calificaciones
- Aplicasion de ED en Ing. CivilDocumento16 páginasAplicasion de ED en Ing. Civilmiguel angel aguilar diazAún no hay calificaciones
- Taller II Cálculo Diferencial 2019-3Documento8 páginasTaller II Cálculo Diferencial 2019-3Nico MoralesAún no hay calificaciones
- Trabajo Final Calculo IntegralDocumento11 páginasTrabajo Final Calculo Integraljose luisAún no hay calificaciones
- Documento Sin TítuloDocumento13 páginasDocumento Sin TítuloRoberto EliasAún no hay calificaciones
- Metodo de Area de MomentosDocumento8 páginasMetodo de Area de MomentosErick Delgado PaisigAún no hay calificaciones
- Aplicaciones de la derivadaDocumento27 páginasAplicaciones de la derivadaMarcelo Garcia HurtadoAún no hay calificaciones
- Modelado Viga EcuacionesDocumento16 páginasModelado Viga EcuacionesAlex Bustamante LaraAún no hay calificaciones
- EcuacionesDiferencialesIngenieriaCivilDocumento4 páginasEcuacionesDiferencialesIngenieriaCivilyadira jucaAún no hay calificaciones
- Problemas resueltos de electromagnetismo. Volumen I: ElectrostáticaDe EverandProblemas resueltos de electromagnetismo. Volumen I: ElectrostáticaAún no hay calificaciones
- CANTIDAD Y CALIDAD DEL AGUA: EL CICLO HIDROLÓGICO, LA CUENCA Y LA PRECIPITACIÓNDocumento50 páginasCANTIDAD Y CALIDAD DEL AGUA: EL CICLO HIDROLÓGICO, LA CUENCA Y LA PRECIPITACIÓNBemjy Junior Rodriguez BermudezAún no hay calificaciones
- Municipalidad Provincial de Marañon: Perfil de Inversion Del ProyectoDocumento167 páginasMunicipalidad Provincial de Marañon: Perfil de Inversion Del ProyectoBemjy Junior Rodriguez BermudezAún no hay calificaciones
- Mapa de la región Matasuyo en PerúDocumento1 páginaMapa de la región Matasuyo en PerúBemjy Junior Rodriguez BermudezAún no hay calificaciones
- Semana 4Documento25 páginasSemana 4Bemjy Junior Rodriguez BermudezAún no hay calificaciones
- Municipalidad Provincial de Marañon: Perfil de Inversion Del ProyectoDocumento167 páginasMunicipalidad Provincial de Marañon: Perfil de Inversion Del ProyectoBemjy Junior Rodriguez BermudezAún no hay calificaciones
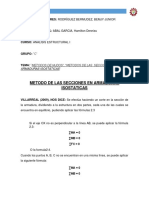
- Parte de EstrDocumento2 páginasParte de EstrBemjy Junior Rodriguez BermudezAún no hay calificaciones
- Municipalidad Provincial de Marañon: Perfil de Inversion Del ProyectoDocumento167 páginasMunicipalidad Provincial de Marañon: Perfil de Inversion Del ProyectoBemjy Junior Rodriguez BermudezAún no hay calificaciones
- Semana 3Documento15 páginasSemana 3Bemjy Junior Rodriguez BermudezAún no hay calificaciones
- 04 872180xtgrwmqczdDocumento23 páginas04 872180xtgrwmqczdBemjy Junior Rodriguez BermudezAún no hay calificaciones
- Semana 1Documento7 páginasSemana 1Bemjy Junior Rodriguez BermudezAún no hay calificaciones
- Semana 4Documento25 páginasSemana 4Bemjy Junior Rodriguez BermudezAún no hay calificaciones
- 08208-04-872198hvgwlzjdbd GeoligiaDocumento22 páginas08208-04-872198hvgwlzjdbd GeoligiaBemjy Junior Rodriguez BermudezAún no hay calificaciones
- 04 872196vgxhjspgmyDocumento14 páginas04 872196vgxhjspgmyBemjy Junior Rodriguez BermudezAún no hay calificaciones
- Semana 2Documento7 páginasSemana 2Bemjy Junior Rodriguez BermudezAún no hay calificaciones
- 04 872200uudfcsgmnz PDFDocumento12 páginas04 872200uudfcsgmnz PDFBemjy Junior Rodriguez BermudezAún no hay calificaciones
- Instrumentos y materiales de laboratorioDocumento102 páginasInstrumentos y materiales de laboratorioBemjy Junior Rodriguez BermudezAún no hay calificaciones
- 04 872199eairyudkraDocumento20 páginas04 872199eairyudkraBemjy Junior Rodriguez BermudezAún no hay calificaciones
- Examen de GeologiaDocumento1 páginaExamen de GeologiaBemjy Junior Rodriguez BermudezAún no hay calificaciones
- Malla 2015 UdhDocumento2 páginasMalla 2015 UdhBemjy Junior Rodriguez BermudezAún no hay calificaciones
- INFORME FINAL TOPOGRAFIA 2 FinalDocumento27 páginasINFORME FINAL TOPOGRAFIA 2 FinalBemjy Junior Rodriguez BermudezAún no hay calificaciones
- 05.01.02. MC-1Documento40 páginas05.01.02. MC-1Bemjy Junior Rodriguez BermudezAún no hay calificaciones
- Formulak Elect.Documento1 páginaFormulak Elect.Bemjy Junior Rodriguez BermudezAún no hay calificaciones
- Caracteristicas de Una SerpienteDocumento2 páginasCaracteristicas de Una SerpienteBemjy Junior Rodriguez BermudezAún no hay calificaciones
- AnalisisDocumento5 páginasAnalisisBemjy Junior Rodriguez BermudezAún no hay calificaciones
- Cálculo de PrimitivasDocumento6 páginasCálculo de PrimitivasBienvenido Acero BarrazaAún no hay calificaciones
- Formato de La Uap para Realizar Trabajos A ManoDocumento1 páginaFormato de La Uap para Realizar Trabajos A ManoBemjy Junior Rodriguez BermudezAún no hay calificaciones
- Formulas de Identidades TrigonometricasDocumento10 páginasFormulas de Identidades TrigonometricasBrianAún no hay calificaciones
- ACERODocumento17 páginasACEROBemjy Junior Rodriguez BermudezAún no hay calificaciones
- Transformaciones LinealesDocumento37 páginasTransformaciones LinealesBemjy Junior Rodriguez BermudezAún no hay calificaciones
- ACERODocumento17 páginasACEROBemjy Junior Rodriguez BermudezAún no hay calificaciones
- Val 01 Agua Desague Carrera OriginalDocumento39 páginasVal 01 Agua Desague Carrera OriginalMarian Flores MezaAún no hay calificaciones
- Esquemática eléctrica automóvilDocumento118 páginasEsquemática eléctrica automóvillast730100% (6)
- Pet-Osermin-Proy-014 - Soldadura ElectricaDocumento2 páginasPet-Osermin-Proy-014 - Soldadura ElectricaGerson Santiago EspinozaAún no hay calificaciones
- Ecuaciones diferenciales y problemas de resortesDocumento2 páginasEcuaciones diferenciales y problemas de resortesElkin MurielAún no hay calificaciones
- Circulo de MohrDocumento7 páginasCirculo de Mohrmodesta araujoAún no hay calificaciones
- Puntos triples y ecuación de Clausius-ClapeyronDocumento3 páginasPuntos triples y ecuación de Clausius-Clapeyronpaula alarconAún no hay calificaciones
- Reglamento Tecnico 2017 Categoria - 150CC 4T VarilleroDocumento8 páginasReglamento Tecnico 2017 Categoria - 150CC 4T VarillerocarrizofAún no hay calificaciones
- Parte 1 - Reparacion de Equipos de Refrigeracion DomesticaDocumento12 páginasParte 1 - Reparacion de Equipos de Refrigeracion DomesticaJonathanAún no hay calificaciones
- Esfuerzos combinados en elementos estructuralesDocumento31 páginasEsfuerzos combinados en elementos estructuralesEmanuel GonzalezAún no hay calificaciones
- Silabo - Fisica 1 - 2020 BDocumento6 páginasSilabo - Fisica 1 - 2020 BDiego Gutierrez RamosAún no hay calificaciones
- Practica 3 - ANÁLISIS CINEMÁTICO DE TRENES DE ENGRANES - 1930203Documento11 páginasPractica 3 - ANÁLISIS CINEMÁTICO DE TRENES DE ENGRANES - 1930203Marco AguilarAún no hay calificaciones
- Practica 3. COMPRESION PERPENDICULAR A LA FIBRA DE MADERADocumento9 páginasPractica 3. COMPRESION PERPENDICULAR A LA FIBRA DE MADERAMARINA SAAVEDRA CAMACHOAún no hay calificaciones
- Guia Fisica II 2o Dep Mar 11Documento36 páginasGuia Fisica II 2o Dep Mar 11Oseas AguirreAún no hay calificaciones
- Service 3123413 03-18-2010 Global LatinSpanishDocumento536 páginasService 3123413 03-18-2010 Global LatinSpanishRuben Angel Roque100% (4)
- Generador C15 (Manual Piezas)Documento717 páginasGenerador C15 (Manual Piezas)JasonA.BeltranAún no hay calificaciones
- 60 - 90 - 01 Ejercicios de Automatismos PDFDocumento7 páginas60 - 90 - 01 Ejercicios de Automatismos PDFqcoyaAún no hay calificaciones
- Tabla de Capilares RefrigeracionDocumento1 páginaTabla de Capilares Refrigeracioncesar100% (1)
- Máquinas de Calor, Segunda Ley de La Termodinámica y EntropiaDocumento9 páginasMáquinas de Calor, Segunda Ley de La Termodinámica y EntropiaAlexis GarciaAún no hay calificaciones
- D10T TransmicionbDocumento25 páginasD10T TransmicionbJuan Galleguillos VilchesAún no hay calificaciones
- 11tema3 K Baja Presion Puros Mezclas PDFDocumento6 páginas11tema3 K Baja Presion Puros Mezclas PDFLuis Antonio Sánchez SánchezAún no hay calificaciones
- Actividad 1.4 - TrabajoDocumento10 páginasActividad 1.4 - TrabajoVale BarajasAún no hay calificaciones
- 2 Máquinas de Corriente DirectaDocumento29 páginas2 Máquinas de Corriente DirectaAce Sainz0% (1)
- Estatica-Equilib MecanicoDocumento15 páginasEstatica-Equilib MecanicoJhoni Trujillo MartelAún no hay calificaciones
- Compuerta CilindricaDocumento10 páginasCompuerta CilindricaIvan Cruz GarciaAún no hay calificaciones
- Sesión de Aprendizaje 8-5Documento6 páginasSesión de Aprendizaje 8-5Jade Liz100% (4)
- Actividad 01 PDFDocumento31 páginasActividad 01 PDFDelgado Aponte YersonAún no hay calificaciones
- BLMDocumento2 páginasBLMAlex AlvarezAún no hay calificaciones
- Laboratorio N 1 de FisicoquimicaDocumento10 páginasLaboratorio N 1 de FisicoquimicaJuan David MontesAún no hay calificaciones
- Cambio de válvulas y reempaque en subestaciónDocumento64 páginasCambio de válvulas y reempaque en subestacióndarkzero20Aún no hay calificaciones
- Diseño GoussetDocumento24 páginasDiseño GoussetFrancisco GarridoAún no hay calificaciones