También podría gustarte
- Diferencial NospinDocumento13 páginasDiferencial NospinCiro Avilio Sarmiento Quiñonez100% (6)
- Eje Delantero VochoDocumento12 páginasEje Delantero VochoVictorperezAún no hay calificaciones
- Mantenimiento auxiliar de sistemas mecánicos y fluidos de aeronaves. TMVO0109De EverandMantenimiento auxiliar de sistemas mecánicos y fluidos de aeronaves. TMVO0109Aún no hay calificaciones
- Metodos de Alineacion y Balanceo...Documento20 páginasMetodos de Alineacion y Balanceo...Darioo Javier100% (4)
- ANÁLISIS TÉCNICO Caja de CambiosDocumento36 páginasANÁLISIS TÉCNICO Caja de CambiosCristofer Aldaair Pérez VásquezAún no hay calificaciones
- ¿Qué Es Tan Divertido De...?: Carreras De Autos Tipo FórmulaDe Everand¿Qué Es Tan Divertido De...?: Carreras De Autos Tipo FórmulaAún no hay calificaciones
- Informe Alineacion de RuedasDocumento12 páginasInforme Alineacion de RuedasJimmyGallegosAún no hay calificaciones
- Construir Un BuggyDocumento30 páginasConstruir Un BuggyLuis Fernando Jimenez Sanchez100% (2)
- M.D.P Chasis de Go-KartDocumento17 páginasM.D.P Chasis de Go-KartFernando PilloAún no hay calificaciones
- Ejercicios Resueltos PotenciaDocumento6 páginasEjercicios Resueltos PotenciaLeonardo Quevedo0% (1)
- Valoración OpcionesDocumento8 páginasValoración Opcionesrodrigo torresAún no hay calificaciones
- Informe de SuspensionDocumento11 páginasInforme de SuspensionKlener OteroAún no hay calificaciones
- Sistemas Del Vehiculo, DireccionDocumento13 páginasSistemas Del Vehiculo, DireccionKevin GarciaAún no hay calificaciones
- Influencia Del Ajuste de La Dirección en El Desgaste de LOS NeumaticosDocumento11 páginasInfluencia Del Ajuste de La Dirección en El Desgaste de LOS NeumaticosLeo PereyraAún no hay calificaciones
- CuestionarioDocumento21 páginasCuestionarioMarco enrique Huaman aicaAún no hay calificaciones
- Marco TeóricoDocumento16 páginasMarco TeóricoJosué RodríguezAún no hay calificaciones
- Practica de TorsionDocumento9 páginasPractica de TorsionAndres AriasAún no hay calificaciones
- NeumaticosDocumento23 páginasNeumaticosjosuesisimithAún no hay calificaciones
- El Sistema de SuspensionDocumento7 páginasEl Sistema de SuspensionTalleres Marcelo BriozzoAún no hay calificaciones
- Alineamiento de DirecciónDocumento8 páginasAlineamiento de DirecciónGilmer PatricioAún no hay calificaciones
- Practica 2Documento13 páginasPractica 2stalinAún no hay calificaciones
- Caster y CamberDocumento12 páginasCaster y CamberAxel Méndez100% (1)
- Diseño de Un Bus para Transporte de PasajerosDocumento11 páginasDiseño de Un Bus para Transporte de PasajerosWagner DavilaAún no hay calificaciones
- SesionN° 4 - GEOMETRIA DE LA DIRECCIONDocumento82 páginasSesionN° 4 - GEOMETRIA DE LA DIRECCIONAndersonAún no hay calificaciones
- Sistema de SuspencionDocumento16 páginasSistema de SuspencionnolvervelasquesAún no hay calificaciones
- Informe 1 - Mantenimiento - II - Sistema de Suspensión MecánicaDocumento9 páginasInforme 1 - Mantenimiento - II - Sistema de Suspensión MecánicaMICHAEL VINICIO DE LA CRUZ GUAYASAMINAún no hay calificaciones
- Informe 9Documento16 páginasInforme 9Brian Trujillo100% (1)
- Angulos Direccionales Zereceda JonathanDocumento37 páginasAngulos Direccionales Zereceda Jonathanbryan gutierrezAún no hay calificaciones
- Guía de Reglajes IracingDocumento22 páginasGuía de Reglajes IracingJuanki BluesmanAún no hay calificaciones
- Tesis AutoguardadoDocumento13 páginasTesis AutoguardadoDavid Calle BravoAún no hay calificaciones
- 12 Sistema SuspensionesDocumento51 páginas12 Sistema SuspensionesalexortunoAún no hay calificaciones
- Presentacion Susp Nissan Sentra 94Documento46 páginasPresentacion Susp Nissan Sentra 94Freddy Lg100% (1)
- Informe-Alineacion de RuedasDocumento25 páginasInforme-Alineacion de Ruedasapolo5512Aún no hay calificaciones
- Proyecto de Ela 02-100Documento16 páginasProyecto de Ela 02-100Rodrigo PattyAún no hay calificaciones
- Informe de Suspension Tipo BallestasDocumento11 páginasInforme de Suspension Tipo BallestasAlejandro Fabián MoreyraAún no hay calificaciones
- BALANCEADORADocumento58 páginasBALANCEADORAAlex PinosAún no hay calificaciones
- Sistema de DireccionDocumento7 páginasSistema de DireccionJhoan PortalesAún no hay calificaciones
- Articulo 2da Entrega Al 90%Documento12 páginasArticulo 2da Entrega Al 90%Andres Felipe Pinilla LeonAún no hay calificaciones
- Cuestionario - ST - 2019Documento63 páginasCuestionario - ST - 2019Andres PeñalozaAún no hay calificaciones
- Alineacion de DireccionDocumento8 páginasAlineacion de DireccionSaul Eduardo Perez HiguitaAún no hay calificaciones
- Cuestionario de 2o ParcialDocumento11 páginasCuestionario de 2o ParcialLuis Octavio MateosAún no hay calificaciones
- AlineacionDocumento4 páginasAlineacionFabian LopezAún no hay calificaciones
- Cómo Construir Un Go KartDocumento4 páginasCómo Construir Un Go KartCESAR TAPIAAún no hay calificaciones
- Principio AckermanDocumento9 páginasPrincipio AckermanAdrian AlvarezAún no hay calificaciones
- Como Hacer Un Carro de Madera Con MotorDocumento5 páginasComo Hacer Un Carro de Madera Con MotorgeebewAún no hay calificaciones
- Sistemas Propulsores - 1ra ParteDocumento14 páginasSistemas Propulsores - 1ra PartedannyAún no hay calificaciones
- Informe Practica DireccionDocumento8 páginasInforme Practica DireccionRodrigo Miguel Ambuludi ErigoyaAún no hay calificaciones
- Sistema de SuspensiónDocumento20 páginasSistema de SuspensiónLuis SanchezAún no hay calificaciones
- Alineado ComputarizadoDocumento12 páginasAlineado ComputarizadoVladwing LCAún no hay calificaciones
- Alineacion y BalanceoDocumento9 páginasAlineacion y BalanceoCristian Rueda CastroAún no hay calificaciones
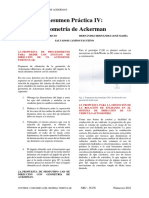
- Resumen Práctica 4 Geometria de AckermanDocumento3 páginasResumen Práctica 4 Geometria de AckermanVictor LopezAún no hay calificaciones
- Manual de Go Kart 2022Documento14 páginasManual de Go Kart 2022Arévalo RVAún no hay calificaciones
- Biela PistonDocumento5 páginasBiela PistonmekAún no hay calificaciones
- Centro de RolidoDocumento9 páginasCentro de Rolidofredytj_899036Aún no hay calificaciones
- Labs de ChasisDocumento5 páginasLabs de ChasisUntalkinchAún no hay calificaciones
- Mecánica Del Vehículo, Tania Sainz IsachDocumento9 páginasMecánica Del Vehículo, Tania Sainz IsachTania Sainz IsachAún no hay calificaciones
- Camber y CasterDocumento9 páginasCamber y Casterelias herreraAún no hay calificaciones
- Rotacion de Neumaticos en Camiones PDFDocumento4 páginasRotacion de Neumaticos en Camiones PDFAlex Rivera100% (1)
- Examen de Grado MecanicaDocumento38 páginasExamen de Grado Mecanicaedwin floresAún no hay calificaciones
- Formula SaeDocumento22 páginasFormula SaeDar JaviAún no hay calificaciones
- Guia Laboratorio Inspeccion Tren DelanteroDocumento16 páginasGuia Laboratorio Inspeccion Tren DelanteroDiego JopiaAún no hay calificaciones
- GlosarioDocumento6 páginasGlosarioEDISA RIVERAAún no hay calificaciones
- Guía de Utilización Herramienta EstelaDocumento7 páginasGuía de Utilización Herramienta EstelaEnrique del ReyAún no hay calificaciones
- Evidencia 3 MichelinDocumento6 páginasEvidencia 3 Michelintournat madridAún no hay calificaciones
- Cultura OrganizacionalDocumento32 páginasCultura OrganizacionalMireya Linares AsquiAún no hay calificaciones
- 2.7 Reingeniería de ProcesosDocumento5 páginas2.7 Reingeniería de ProcesosJaqueline OsorioAún no hay calificaciones
- Meza, Maria Belen. Ni Pan Ni Techo Ni Abrigo.Documento161 páginasMeza, Maria Belen. Ni Pan Ni Techo Ni Abrigo.Daniel CordovaAún no hay calificaciones
- Actividad 08. - Prueba de Hipótesis para La Media y La Proporción PoblacionalDocumento4 páginasActividad 08. - Prueba de Hipótesis para La Media y La Proporción PoblacionalKatherine ToapantaAún no hay calificaciones
- Caso Clínico Coloprocto 2Documento3 páginasCaso Clínico Coloprocto 2Joel RJAún no hay calificaciones
- Sintesis CurricularDocumento3 páginasSintesis CurricularAna PetitAún no hay calificaciones
- Acero DPDocumento196 páginasAcero DPJesus CumpaAún no hay calificaciones
- Neumonia en PediatriaDocumento23 páginasNeumonia en Pediatriagabriela cedeñoAún no hay calificaciones
- CTTO PF ESR ServiciosDocumento4 páginasCTTO PF ESR ServiciosDaniel Tudela HigueraAún no hay calificaciones
- M11 U1 A2 LUGV Politicasylineamientos.Documento7 páginasM11 U1 A2 LUGV Politicasylineamientos.SAMARA HAILEN GONZALEZAún no hay calificaciones
- KinectDocumento9 páginasKinectMarcos GodoyAún no hay calificaciones
- Trabajo Final PastosDocumento9 páginasTrabajo Final Pastosjoelrueda2011Aún no hay calificaciones
- Texto de TopografiaDocumento175 páginasTexto de TopografiaJoel Abdel Bravo Pereira100% (1)
- 4º Ciclo Vii - Carpeta de Recuperación 2022 - Arte y CulturaDocumento20 páginas4º Ciclo Vii - Carpeta de Recuperación 2022 - Arte y CulturaLibreri TyjAún no hay calificaciones
- ACTIVIDAD NO.2 Linea de TiempoDocumento6 páginasACTIVIDAD NO.2 Linea de TiempoMayra Alejandra ALFONSO MOYAAún no hay calificaciones
- Ergonomía y Diseño GráficoDocumento2 páginasErgonomía y Diseño GráficoCamila ArangoAún no hay calificaciones
- Jaguar X6Documento2 páginasJaguar X6Miguel Angel Torrez GuzmanAún no hay calificaciones
- Agenda Económica BolivarianaDocumento13 páginasAgenda Económica BolivarianaJennyfer de VelascoAún no hay calificaciones
- Auto Ingles para El TurismoDocumento32 páginasAuto Ingles para El TurismoSalma AndreaAún no hay calificaciones
- CV Ingeniero ResidenteDocumento6 páginasCV Ingeniero ResidenteXimena Andrea Gamboa TorresAún no hay calificaciones
- Trabajo Se SeguridadDocumento6 páginasTrabajo Se SeguridadMega Inversiones Jaen100% (1)
- Monografía DaniDocumento40 páginasMonografía Daniallyson ortuñoAún no hay calificaciones
- Análisis de RiesgoDocumento56 páginasAnálisis de RiesgoBernardo CampusanoAún no hay calificaciones
- Tarea 4 Administracion de EmpresaDocumento7 páginasTarea 4 Administracion de EmpresaEilin SanchezAún no hay calificaciones
- Reglas VeroDocumento9 páginasReglas Veromelina-solisAún no hay calificaciones
- EXAMEN 1 2017 ComentadoDocumento7 páginasEXAMEN 1 2017 ComentadoCarlos ArriazaAún no hay calificaciones