También podría gustarte
- Hoja de Trabajo 01 - Método CientíficoDocumento3 páginasHoja de Trabajo 01 - Método CientíficoAnthony Paul Goyes QuintanillaAún no hay calificaciones
- Laboratorio 2 (Paralelogramo de Fuerzas)Documento5 páginasLaboratorio 2 (Paralelogramo de Fuerzas)Jorge Daniel Guzmán Zapata100% (1)
- Selectividad de Dibujo (300 Problemas ResueltosDocumento173 páginasSelectividad de Dibujo (300 Problemas ResueltosIndalecio Díaz Martínez86% (7)
- Diapositivas Clases de VectoresDocumento37 páginasDiapositivas Clases de VectoresMiguel ArteagaAún no hay calificaciones
- VectoresDocumento5 páginasVectoreseusr388595034100% (3)
- 06 1 VectoresDocumento20 páginas06 1 VectoresRafael Gustavo Vargas EscaleraAún no hay calificaciones
- Unidad 3 VectoresDocumento32 páginasUnidad 3 VectoresArio Santiago Peralta FuentesAún no hay calificaciones
- Guia de VectoresDocumento4 páginasGuia de VectoresValenzuela C PazAún no hay calificaciones
- Repaso de VectoresDocumento57 páginasRepaso de VectoresBrianAún no hay calificaciones
- VECTORESDocumento2 páginasVECTORESRoberto AlvitresAún no hay calificaciones
- Clases VectoresDocumento39 páginasClases VectoresSofia Caicheo OteyAún no hay calificaciones
- Sistema CartesianoDocumento44 páginasSistema Cartesianojayro ramos coaguilaAún no hay calificaciones
- Repaso-Vectores 22618Documento66 páginasRepaso-Vectores 22618wagnerAún no hay calificaciones
- VectoresDocumento16 páginasVectoresAbel Rodriguez SolanoAún no hay calificaciones
- Vector EsDocumento18 páginasVector EsBrayan Pava OlarteAún no hay calificaciones
- 3 - Representacion VectorialDocumento16 páginas3 - Representacion Vectorialjeanpaulsolanomejia1Aún no hay calificaciones
- Introducción A Los VectoresDocumento8 páginasIntroducción A Los VectoresR3N474Aún no hay calificaciones
- VectoresDocumento104 páginasVectoreschavezcejAún no hay calificaciones
- Tema 3 FisicaDocumento38 páginasTema 3 Fisicahuayllaninoemi080Aún no hay calificaciones
- Coceptos Básicos de Vectores ElectivoDocumento16 páginasCoceptos Básicos de Vectores ElectivoJimena Scarich linerosAún no hay calificaciones
- Cap 1 Vectores y Problemas Wilson Buffa 2a EdDocumento11 páginasCap 1 Vectores y Problemas Wilson Buffa 2a EdDana OsegueraAún no hay calificaciones
- Propedéutico 2 1 Vectores CGDocumento13 páginasPropedéutico 2 1 Vectores CGguhAún no hay calificaciones
- Vectores Resumen Capitulo 3Documento12 páginasVectores Resumen Capitulo 3Oscar SantosAún no hay calificaciones
- Suma de VectoresDocumento4 páginasSuma de VectoresErKapiAún no hay calificaciones
- Guia 4 Cantidades Vectoriales y EscalaresDocumento12 páginasGuia 4 Cantidades Vectoriales y Escalaresximena94Aún no hay calificaciones
- Unidad - 3 - Vectores en ConstruccionDocumento18 páginasUnidad - 3 - Vectores en ConstruccionJuan Felipe Lindo NavarroAún no hay calificaciones
- 06 Física - Sesión 06 - Clases (19-05-2020) PDFDocumento54 páginas06 Física - Sesión 06 - Clases (19-05-2020) PDFEdson MaxAún no hay calificaciones
- Magnitudes Escalares y VectorialesDocumento19 páginasMagnitudes Escalares y VectorialesMargarita Sepulveda100% (2)
- Vectores 1 AñoDocumento3 páginasVectores 1 AñoRiveliñho CrzzAún no hay calificaciones
- Practica 1 Parte1 VectoresDocumento4 páginasPractica 1 Parte1 VectoresSara MAún no hay calificaciones
- Magnitudes Escalares y Vectoriales 3Documento17 páginasMagnitudes Escalares y Vectoriales 3Rosemberg Restrepo Salazar100% (1)
- Magnitudes Escalares y VectorialesDocumento17 páginasMagnitudes Escalares y VectorialesLuisAún no hay calificaciones
- Investigacion de Algebra VectorialDocumento24 páginasInvestigacion de Algebra VectorialFabio Sánchez CamargoAún no hay calificaciones
- Guia Concepto VectoresDocumento27 páginasGuia Concepto VectoresJimena ScarichAún no hay calificaciones
- Geometría VectorialDocumento57 páginasGeometría VectoriallolitoAún no hay calificaciones
- Cap1 Vectores en El PlanoDocumento23 páginasCap1 Vectores en El Planoramirex7Aún no hay calificaciones
- ADVANCE 202305 - VectoresDocumento55 páginasADVANCE 202305 - VectoresManu AvilaVAún no hay calificaciones
- Operaciones Con VectoresDocumento7 páginasOperaciones Con VectoresMaricarmen BellaAún no hay calificaciones
- Vector EsDocumento39 páginasVector EsErick RicardoAún no hay calificaciones
- Fisica Aplicada 2022 TSEI TSCAIDocumento23 páginasFisica Aplicada 2022 TSEI TSCAINancy FernandezAún no hay calificaciones
- Magnitudes Físicas: Escalares Y Vectores: Unidad 1Documento46 páginasMagnitudes Físicas: Escalares Y Vectores: Unidad 1Michell Lobos ValenzuelaAún no hay calificaciones
- Magnitudes Escalares y VectorialesDocumento16 páginasMagnitudes Escalares y VectorialesperrocaminanteAún no hay calificaciones
- Vector EsDocumento6 páginasVector EsSergio SalasAún no hay calificaciones
- Unidad 2 Magnitudes Fisicas y CinematicaDocumento27 páginasUnidad 2 Magnitudes Fisicas y CinematicaGABRIELAAún no hay calificaciones
- Semana 2 - VectotesDocumento20 páginasSemana 2 - VectotesStiven UlloaAún no hay calificaciones
- Física, A-B Medidas, VectoresDocumento25 páginasFísica, A-B Medidas, VectoresDennys ChaconAún no hay calificaciones
- Facultad de Estudios A DistanciaDocumento23 páginasFacultad de Estudios A Distanciajorge eliecerAún no hay calificaciones
- 3 VectoresDocumento8 páginas3 VectoresEdgar Llave VincentiAún no hay calificaciones
- Magnitudes Escalares y VectorialesDocumento17 páginasMagnitudes Escalares y VectorialesJosesito HernandezAún no hay calificaciones
- Magnitudes Escalares y Vectoriales 2Documento17 páginasMagnitudes Escalares y Vectoriales 2Rosemberg Restrepo Salazar100% (1)
- Componentes Rectangulares de Un Vector en El Espacio UdoDocumento7 páginasComponentes Rectangulares de Un Vector en El Espacio Udoandrea britoAún no hay calificaciones
- Cuestionario de MatematicasDocumento11 páginasCuestionario de Matematicasjuan morenoAún no hay calificaciones
- Unidad 1 CalculoDocumento9 páginasUnidad 1 CalculoIsrael XoloAún no hay calificaciones
- VectoresDocumento15 páginasVectoresAndres Casas OrdosgoitiaAún no hay calificaciones
- Parte A Vectores - Concepto y Método de SumaDocumento64 páginasParte A Vectores - Concepto y Método de SumaAndres Felipe Galvis CadavidAún no hay calificaciones
- Vectores TEORIADocumento25 páginasVectores TEORIAvegi17100% (1)
- Suma de VectoresDocumento12 páginasSuma de VectoresErika VintimillaAún no hay calificaciones
- Material de Apoyo Unidad 1 (Parte 2)Documento5 páginasMaterial de Apoyo Unidad 1 (Parte 2)Marina MolinaAún no hay calificaciones
- Sesion 4Documento11 páginasSesion 4Andresa SoncoAún no hay calificaciones
- Microsoft PowerPoint - 5tarea Academica - MateDocumento27 páginasMicrosoft PowerPoint - 5tarea Academica - MateJeshua AbalAún no hay calificaciones
- VectoresDocumento7 páginasVectoresMercedes RoblesAún no hay calificaciones
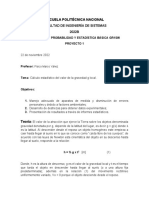
- Proyecto 2Documento2 páginasProyecto 2Anthony Paul Goyes QuintanillaAún no hay calificaciones
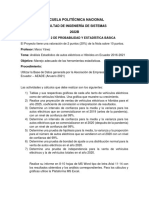
- Proyecto 1 de Estadística - GR1SW - 2022B - Marco YánezDocumento3 páginasProyecto 1 de Estadística - GR1SW - 2022B - Marco YánezAnthony Paul Goyes QuintanillaAún no hay calificaciones
- Capítulo 1. - Medidas y El Método CientíficoDocumento31 páginasCapítulo 1. - Medidas y El Método CientíficoAnthony Paul Goyes QuintanillaAún no hay calificaciones
- Introducción A La FísicaDocumento8 páginasIntroducción A La FísicaAnthony Paul Goyes QuintanillaAún no hay calificaciones
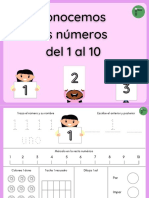
- Conocemos Los Numeros Del 1 Al 10Documento11 páginasConocemos Los Numeros Del 1 Al 10Anthony Paul Goyes QuintanillaAún no hay calificaciones
- Hoja de Trabajo 02 - VectoresDocumento5 páginasHoja de Trabajo 02 - VectoresAnthony Paul Goyes QuintanillaAún no hay calificaciones
- Proceso de MedidaDocumento4 páginasProceso de MedidaAnthony Paul Goyes QuintanillaAún no hay calificaciones
- Goyes AnthonyDocumento1 páginaGoyes AnthonyAnthony Paul Goyes QuintanillaAún no hay calificaciones
- Goyes Anthony Semana8 13BDocumento26 páginasGoyes Anthony Semana8 13BAnthony Paul Goyes QuintanillaAún no hay calificaciones
- 8 Sesion Dib y Cal Sold 2020Documento8 páginas8 Sesion Dib y Cal Sold 2020Tristan Roni LOPEZ FLORESAún no hay calificaciones
- Área de SuperficiesDocumento18 páginasÁrea de Superficiesfedee22Aún no hay calificaciones
- Acv Relaciones Metricas y Areas Triangulares PDFDocumento5 páginasAcv Relaciones Metricas y Areas Triangulares PDFManowar JcAún no hay calificaciones
- Tarea 2 MAT235 Maximiliano Ramírez PDFDocumento6 páginasTarea 2 MAT235 Maximiliano Ramírez PDFMaximiliano Antonio Ramirez NuñezAún no hay calificaciones
- Cing15a.dinamicarot - Doc DINÁMICA ROTACIONALDocumento19 páginasCing15a.dinamicarot - Doc DINÁMICA ROTACIONALYeliber Aguirre ManzabaAún no hay calificaciones
- P7 GAV 2015I SolucionDocumento5 páginasP7 GAV 2015I SolucionLicely ZavaletaAún no hay calificaciones
- Volumen de Un Sólido Hueco Método de La ArandelaDocumento7 páginasVolumen de Un Sólido Hueco Método de La ArandelaJordan LluguayAún no hay calificaciones
- WWW - Sectormatematica.cl Basica Santillana AreasDocumento3 páginasWWW - Sectormatematica.cl Basica Santillana AreasLuis Barrios100% (1)
- Ecuación Ordinaria de La CircunferenciaDocumento4 páginasEcuación Ordinaria de La CircunferenciaIsrael AlcalaAún no hay calificaciones
- Condiciones TopograficasDocumento20 páginasCondiciones TopograficasEloy HernandezAún no hay calificaciones
- 01 Introducción PDFDocumento68 páginas01 Introducción PDFFelix RodriguezAún no hay calificaciones
- Diccionario Lexical MatematicasDocumento32 páginasDiccionario Lexical MatematicasNico Romero RodriguezAún no hay calificaciones
- Sistema de Funciones IteradosDocumento6 páginasSistema de Funciones IteradosJose Luis BenitesAún no hay calificaciones
- Laboratorio 3-3Documento6 páginasLaboratorio 3-3Perez Obando Marco AlejandroAún no hay calificaciones
- Taller de TrigonometríaDocumento12 páginasTaller de TrigonometríaAlejandro BriseñoAún no hay calificaciones
- Matriz Modelo Proyecto Escolar 2 ADocumento15 páginasMatriz Modelo Proyecto Escolar 2 AJulio Ayala EspinosaAún no hay calificaciones
- Triángulo RectánguloDocumento15 páginasTriángulo RectánguloJose Gustavo Lopez MujicaAún no hay calificaciones
- Ejercicio Cantidades Escalares y Vectoriales. Estudiante 2Documento2 páginasEjercicio Cantidades Escalares y Vectoriales. Estudiante 2Aleja OrtegaAún no hay calificaciones
- Prog Anual 2023 - JGCDocumento20 páginasProg Anual 2023 - JGCKeyla N. Barturen GuevaraAún no hay calificaciones
- Fa3 2021 2 02flujoDocumento44 páginasFa3 2021 2 02flujoAngel RosalesAún no hay calificaciones
- Función LinealDocumento3 páginasFunción LinealJeremias OssvaldAún no hay calificaciones
- MI - Clase15 - Momentos de Inercia de Area VCLASEDocumento46 páginasMI - Clase15 - Momentos de Inercia de Area VCLASERussell Pastor MedinaAún no hay calificaciones
- G Sem2Documento8 páginasG Sem2edward VladimirovichAún no hay calificaciones
- 02-11-22 - Mat - Hoja de AplicacionDocumento7 páginas02-11-22 - Mat - Hoja de AplicacionJhanahee FarroAún no hay calificaciones
- Diseño y Análisis de Un Tanque A Presión de GLPDocumento5 páginasDiseño y Análisis de Un Tanque A Presión de GLPXavier AsitimbayAún no hay calificaciones
- Segunda Unidad Dibujo de Ing1Documento13 páginasSegunda Unidad Dibujo de Ing1Josias JonatanAún no hay calificaciones
- Rubrica MatematicasDocumento1 páginaRubrica MatematicasBJ Emanuel Gonzalez ChavezAún no hay calificaciones
- Preguntas de Exámenes de Admisión de La Universidad Mayor de San MarcosDocumento11 páginasPreguntas de Exámenes de Admisión de La Universidad Mayor de San MarcosJordanIvánAún no hay calificaciones
- Ejercicios Resueltos Algebra LinealDocumento9 páginasEjercicios Resueltos Algebra LinealRicardo HerreraAún no hay calificaciones