También podría gustarte
- Montaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109De EverandMontaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109Aún no hay calificaciones
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209De EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Calificación: 1 de 5 estrellas1/5 (2)
- Practica 2Documento12 páginasPractica 2Charly BautistaAún no hay calificaciones
- Control de Motores AC y DCDocumento21 páginasControl de Motores AC y DCJesús Emanuel Urrutia33% (3)
- Practica 2Documento13 páginasPractica 2Charly BautistaAún no hay calificaciones
- Mecatronica P WoltonDocumento13 páginasMecatronica P WoltonJose Luis Alonso MartinezAún no hay calificaciones
- Actividad 1 Control de Maquinas Electricas, Equipo 5Documento28 páginasActividad 1 Control de Maquinas Electricas, Equipo 5Miguel Ángel Hernández ManuelAún no hay calificaciones
- Variador Velocidad MaquinasDocumento9 páginasVariador Velocidad MaquinasJm DsoAún no hay calificaciones
- Variado de VelocidadDocumento11 páginasVariado de VelocidadJose MoralesAún no hay calificaciones
- Investigación Unidad 4 - Maquinas Electricas - José Ángel Toledo SalinasDocumento21 páginasInvestigación Unidad 4 - Maquinas Electricas - José Ángel Toledo SalinasJosé ToledoAún no hay calificaciones
- Informe - Control Electronico de MotoresDocumento10 páginasInforme - Control Electronico de MotorescristoferAún no hay calificaciones
- Control de Un Motor DC Mediante SensoresDocumento9 páginasControl de Un Motor DC Mediante SensoresAlin Eduardo Gabino GarciaAún no hay calificaciones
- Examen 1 Sistema Elëctrico (Documento Guía)Documento14 páginasExamen 1 Sistema Elëctrico (Documento Guía)Monica MolinaAún no hay calificaciones
- Sistemas Auxiliares Maquinaria Pesada-1Documento19 páginasSistemas Auxiliares Maquinaria Pesada-1ғɪᴅᴇʟ ɪᴠᴀɴ ꜱᴇᴠᴇʀɪᴀɴᴏ ᴀʟғᴏɴꜱᴏAún no hay calificaciones
- Practica 4 Lds MDocumento9 páginasPractica 4 Lds MOscar MedellinAún no hay calificaciones
- Reporte Práctica Función de TransferenciaDocumento20 páginasReporte Práctica Función de TransferenciaDiego HernándezAún no hay calificaciones
- Laboratorio - 1 - Identificacion y Control de Motor DCDocumento5 páginasLaboratorio - 1 - Identificacion y Control de Motor DCDavid QuinteroAún no hay calificaciones
- Ensayo de BaldorDocumento6 páginasEnsayo de Baldorcomar05Aún no hay calificaciones
- Proyecto Motor GeneradorDocumento26 páginasProyecto Motor Generadorjulian sanchezAún no hay calificaciones
- Diseño de Un Servomecanismo de PosiciónDocumento12 páginasDiseño de Un Servomecanismo de PosiciónDiego Vidarte100% (1)
- Proyecto Control de PosiciónDocumento24 páginasProyecto Control de PosiciónBennyAguirre100% (1)
- Circuito TroceadorDocumento8 páginasCircuito TroceadorFredySoporteTecnicoAún no hay calificaciones
- PAE I Clase 13Documento8 páginasPAE I Clase 13Adrián SuárezAún no hay calificaciones
- 1) Definición D-WPS OfficeDocumento5 páginas1) Definición D-WPS OfficeMiguel FigueroaAún no hay calificaciones
- Proyecto Motor Generador 2Documento28 páginasProyecto Motor Generador 2julian sanchezAún no hay calificaciones
- Unidad5 Variadores de VelocidadDocumento28 páginasUnidad5 Variadores de VelocidadIsabel Alvarez SErranoAún no hay calificaciones
- Motores BLDCDocumento35 páginasMotores BLDCRogelio Santiago León JapaAún no hay calificaciones
- Arrancadores Electromagnéticos y Variadores de Frecuencia y Velocidad para El Control de Motores EléctricosDocumento3 páginasArrancadores Electromagnéticos y Variadores de Frecuencia y Velocidad para El Control de Motores EléctricosJulio César De Dios0% (1)
- El Sistema Ward-LeonardDocumento10 páginasEl Sistema Ward-LeonardMilton Jô100% (2)
- Sumativa 4 Máquinas electricasII Hermes ChavezDocumento12 páginasSumativa 4 Máquinas electricasII Hermes ChavezGlenda Ureña de ChavezAún no hay calificaciones
- Practica 2 WordDocumento14 páginasPractica 2 WordRamos Alvarado ChristianAún no hay calificaciones
- Control de MáquinasDocumento7 páginasControl de MáquinasNorberto RosasAún no hay calificaciones
- MotorDocumento3 páginasMotorMiguel Ignacio Cabrera PerezAún no hay calificaciones
- CONTROLADOR-DE-MOTOR de CDDocumento21 páginasCONTROLADOR-DE-MOTOR de CDSamantha Arevalo Martinez100% (3)
- Control de Velocidad de Un Motor Dc.Documento23 páginasControl de Velocidad de Un Motor Dc.alonsold936924Aún no hay calificaciones
- Pract2 DSMDocumento9 páginasPract2 DSMMiguel SalasAún no hay calificaciones
- Variador de Velocidad LUIS LEALDocumento7 páginasVariador de Velocidad LUIS LEALLuis Ernesto LealAún no hay calificaciones
- Labo 4 InstaDocumento9 páginasLabo 4 Instaraulgarzon00331Aún no hay calificaciones
- Variadores 6 y 12 PulsosDocumento8 páginasVariadores 6 y 12 PulsosJorge Alberto Quiza PolaniaAún no hay calificaciones
- Practica 5. Garcia Gonzalez DaianaDocumento10 páginasPractica 5. Garcia Gonzalez DaianaMichel IslasAún no hay calificaciones
- Accionamientos y ElectricosDocumento6 páginasAccionamientos y ElectricosJOSE RENE VASQUES MENESESAún no hay calificaciones
- Informe Partidor SuaveDocumento11 páginasInforme Partidor SuaveMagdiel AriasAún no hay calificaciones
- Practica 2 Arranque de MotorDocumento11 páginasPractica 2 Arranque de MotorBF UlloaAún no hay calificaciones
- Douglas FuenmayorDocumento8 páginasDouglas FuenmayorDeiver Miguel Mieles HerreraAún no hay calificaciones
- 02 Sistema de Carga en A5Documento16 páginas02 Sistema de Carga en A5Leyla ContrerasAún no hay calificaciones
- Pruebas Generador SincronoDocumento5 páginasPruebas Generador SincronoFrancoAún no hay calificaciones
- Elite ControldearranqueyparomotordedcDocumento16 páginasElite ControldearranqueyparomotordedcLindsey GuzmanAún no hay calificaciones
- Motor ElectricoDocumento80 páginasMotor ElectricoAbraham Tzompantzi LeonAún no hay calificaciones
- Práctica No. 2 de PachecoDocumento5 páginasPráctica No. 2 de PachecoJonatan MartínezAún no hay calificaciones
- El Control Electrónico de Motores de Corriente DirectaDocumento5 páginasEl Control Electrónico de Motores de Corriente Directa10042767Aún no hay calificaciones
- Arranque DirectoDocumento11 páginasArranque DirectoJoseph LlangariAún no hay calificaciones
- Tema 67Documento57 páginasTema 67José DanielAún no hay calificaciones
- S11 - Actuadores ElectricosDocumento46 páginasS11 - Actuadores Electricosfranklingiovanni100% (1)
- Reporte - DriverDocumento5 páginasReporte - DriverJonah RsAún no hay calificaciones
- Servomecanismos ElectrohidraulicosDocumento28 páginasServomecanismos Electrohidraulicosisraelmh150887100% (3)
- Practica #1 Laboratorio de Automatizacion y Robotica.Documento6 páginasPractica #1 Laboratorio de Automatizacion y Robotica.Irving Zahir Anadón López100% (1)
- Control de Giro de MotorDocumento5 páginasControl de Giro de MotorJuan CalderonAún no hay calificaciones
- Bitacora1 Laboratorio Control Balancin Motor HeliceDocumento21 páginasBitacora1 Laboratorio Control Balancin Motor HelicePuig123Aún no hay calificaciones
- Control y Puesta en Marcha de Los Motores Eléctricos de CaDocumento19 páginasControl y Puesta en Marcha de Los Motores Eléctricos de CaMiguel Serra0% (2)
- Montaje y mantenimiento de transformadores. ELEE0109De EverandMontaje y mantenimiento de transformadores. ELEE0109Aún no hay calificaciones
- Tarea 2 ACTDocumento28 páginasTarea 2 ACTMiguel SalasAún no hay calificaciones
- Solid WorksDocumento6 páginasSolid WorksMiguel SalasAún no hay calificaciones
- Practica Moderno 8Documento6 páginasPractica Moderno 8Miguel SalasAún no hay calificaciones
- Practica Moderno 9Documento7 páginasPractica Moderno 9Miguel SalasAún no hay calificaciones
- Plan de Trabajo Semana 19Documento3 páginasPlan de Trabajo Semana 19Miguel SalasAún no hay calificaciones
- Pract1 DSMDocumento11 páginasPract1 DSMMiguel SalasAún no hay calificaciones
- Pia Cad-CamDocumento155 páginasPia Cad-CamMiguel SalasAún no hay calificaciones
- Tarea 2 ACTDocumento28 páginasTarea 2 ACTMiguel SalasAún no hay calificaciones
- Bloque I Unidad 1.4 Técnicas y Procedimientos de RescateDocumento33 páginasBloque I Unidad 1.4 Técnicas y Procedimientos de Rescatenicolas3628Aún no hay calificaciones
- Woltman DorotDocumento2 páginasWoltman DorotVictor Alonso Martinez RodriguezAún no hay calificaciones
- Une - 36832 1997 Hormigón Estructurla - Uniones Soldadas BarrasDocumento16 páginasUne - 36832 1997 Hormigón Estructurla - Uniones Soldadas BarrasPamela SanabriaAún no hay calificaciones
- Semana 11Documento7 páginasSemana 11Yurianis MoralesAún no hay calificaciones
- Presentacion de Integrales DefinidasDocumento33 páginasPresentacion de Integrales DefinidasSamuel ParazuelaAún no hay calificaciones
- Manual Instrucciones Poolex SilverlineDocumento36 páginasManual Instrucciones Poolex SilverlineyoAún no hay calificaciones
- CLAVEDocumento10 páginasCLAVEalbertoAún no hay calificaciones
- Guía Física 7 SeptiembreDocumento3 páginasGuía Física 7 SeptiembreWINETH DURAN RODRIGUEZAún no hay calificaciones
- Variable Aleatoria Continua UcaDocumento18 páginasVariable Aleatoria Continua UcaElena MartinezAún no hay calificaciones
- 3 Propiedades Mecánicas de Los MetalesDocumento6 páginas3 Propiedades Mecánicas de Los MetalesandresAún no hay calificaciones
- Instrumento Eval. Cuestionario Duvan 22Documento10 páginasInstrumento Eval. Cuestionario Duvan 22cristian correa amarizAún no hay calificaciones
- Reporte 9 TermoDocumento3 páginasReporte 9 TermoLuis Carlos Luna RubioAún no hay calificaciones
- Taller 3Documento2 páginasTaller 3Nicolás Andrés Vargas CáceresAún no hay calificaciones
- Compendio Proyectos GTE Construccion Enero 2022Documento128 páginasCompendio Proyectos GTE Construccion Enero 2022LUCIO QUIROZ MILLAAún no hay calificaciones
- UntitledDocumento17 páginasUntitledFabian RodriguezAún no hay calificaciones
- 03 - Tarea SET BDocumento2 páginas03 - Tarea SET BMargaritaAún no hay calificaciones
- Evaluación 1 Undécimo II S 2020Documento11 páginasEvaluación 1 Undécimo II S 2020Santiago RodriguezAún no hay calificaciones
- 12 Dureza Rockwell - Pt.esDocumento8 páginas12 Dureza Rockwell - Pt.esGrecia valAún no hay calificaciones
- BitácoraDocumento9 páginasBitácoraSteven ZúñigaAún no hay calificaciones
- SubestacionesDocumento34 páginasSubestacionesFREDDY BERMUDEZAún no hay calificaciones
- MercatorDocumento6 páginasMercatorBenito CamelasAún no hay calificaciones
- Guia 7 Grado 10 QuimicaDocumento4 páginasGuia 7 Grado 10 Quimicaalexander cordobaAún no hay calificaciones
- PROYECTODocumento34 páginasPROYECTOKevin E DezaAún no hay calificaciones
- 3.1. Guia de Practicas 3er Parcial Ejercicios Propuestos PDFDocumento9 páginas3.1. Guia de Practicas 3er Parcial Ejercicios Propuestos PDFEvanz Gutierrez QuispeAún no hay calificaciones
- GUÍA 3 Matemática 10° 2021 - RESUELTODocumento10 páginasGUÍA 3 Matemática 10° 2021 - RESUELTOAlex Navarro MartinezAún no hay calificaciones
- ESPACIOS VECTORIALES Word-FusionadoDocumento5 páginasESPACIOS VECTORIALES Word-FusionadoIván GuachamínAún no hay calificaciones
- Sensor de Presión Del Filtro de Partículas Diesel A - AutodataDocumento3 páginasSensor de Presión Del Filtro de Partículas Diesel A - AutodataSantiago Rodriguez BejaranoAún no hay calificaciones
- C-Estatica Aplicada A La Ing Civil 2021-1Documento2 páginasC-Estatica Aplicada A La Ing Civil 2021-1Yerovi Ventura SigueñasAún no hay calificaciones
- Unidad I - Rectas en El PlanoDocumento7 páginasUnidad I - Rectas en El PlanoRogerAún no hay calificaciones
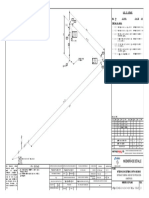
- Ingeniería de Detalle: Plano Integracion Sistema Contra IncendioDocumento1 páginaIngeniería de Detalle: Plano Integracion Sistema Contra IncendiojavierAún no hay calificaciones