También podría gustarte
- Control preciso posición eje con servomotorDocumento5 páginasControl preciso posición eje con servomotorHumberto José Reyes CevallosAún no hay calificaciones
- PPAA01 TareaDocumento4 páginasPPAA01 Tareasandra100% (1)
- Recipientes Sometidos A PresiónDocumento46 páginasRecipientes Sometidos A PresiónVASQUEZ CERQUIN LUIS ANGEL100% (1)
- Presentacion Actuadores Electricos PDFDocumento16 páginasPresentacion Actuadores Electricos PDFCHQXXVIIIAún no hay calificaciones
- ITTI Circuitos y Maquinarias Eléctricas 2021-2. ServomotoresDocumento12 páginasITTI Circuitos y Maquinarias Eléctricas 2021-2. ServomotoresMauricio MerazAún no hay calificaciones
- Investigación Unidad 4 - Maquinas Electricas - José Ángel Toledo SalinasDocumento21 páginasInvestigación Unidad 4 - Maquinas Electricas - José Ángel Toledo SalinasJosé ToledoAún no hay calificaciones
- Servomotor para ModelismoDocumento7 páginasServomotor para ModelismoPablo Emilio ParedesAún no hay calificaciones
- Servomotores G6Documento35 páginasServomotores G6abdieltarqui7Aún no hay calificaciones
- Variador Velocidad MaquinasDocumento9 páginasVariador Velocidad MaquinasJm DsoAún no hay calificaciones
- Proyecto 2 Manipuladores IndustrialesDocumento52 páginasProyecto 2 Manipuladores IndustrialesCarlos FloresAún no hay calificaciones
- MotoresDocumento12 páginasMotoresjavla2525Aún no hay calificaciones
- Servomotores Eléctricos PDFDocumento17 páginasServomotores Eléctricos PDFbrianj010% (1)
- BM ServomotoresDocumento13 páginasBM ServomotoresSaid GonzálezAún no hay calificaciones
- ServomotoresDocumento14 páginasServomotoresRuben Mejía Almeida50% (2)
- Practica 7 MSGTDocumento13 páginasPractica 7 MSGTMelanie Sarahi González TovarAún no hay calificaciones
- Laboratorio 3.1Documento14 páginasLaboratorio 3.1jscacuangoAún no hay calificaciones
- Echegaray y YoDocumento14 páginasEchegaray y YoAldahir SoriaAún no hay calificaciones
- Grupo#2 Actuadores Electricos. InformeDocumento5 páginasGrupo#2 Actuadores Electricos. InformeGabiita Lara CevallosAún no hay calificaciones
- 7) Servomotor PDFDocumento8 páginas7) Servomotor PDFdavid delgadoAún no hay calificaciones
- T1 Robotica Industrial - ServomotoresDocumento83 páginasT1 Robotica Industrial - Servomotoressilverio17antezanaAún no hay calificaciones
- Douglas FuenmayorDocumento8 páginasDouglas FuenmayorDeiver Miguel Mieles HerreraAún no hay calificaciones
- Motor Paso A PasoDocumento10 páginasMotor Paso A PasoPedraza MyersAún no hay calificaciones
- Practica 5 Actuadores YISEDocumento9 páginasPractica 5 Actuadores YISEYoselin SantiagoAún no hay calificaciones
- Servomotor modelismoDocumento6 páginasServomotor modelismoAldo Velarde TorresAún no hay calificaciones
- Sem 5 Hoja de InformaciónDocumento6 páginasSem 5 Hoja de InformaciónFranco AlejandriaAún no hay calificaciones
- Arrancadores ElectrónicosDocumento18 páginasArrancadores ElectrónicosCarlos FernandezAún no hay calificaciones
- Como Funciona Un ServomotorDocumento6 páginasComo Funciona Un Servomotorjuan camiloAún no hay calificaciones
- Servomotor IndustrialDocumento11 páginasServomotor IndustrialJose Humberto Verdugo Nuñez100% (1)
- ActuadoresDocumento30 páginasActuadoresmanuel_avalos_21Aún no hay calificaciones
- Teoria HoyDocumento3 páginasTeoria HoymarcoAún no hay calificaciones
- Que Es Un ServomotorDocumento10 páginasQue Es Un ServomotorJoel CordovaAún no hay calificaciones
- Control InstruemntacionDocumento210 páginasControl InstruemntacionAnibal ChavezAún no hay calificaciones
- ITA 8.3, MVVV, Tarea 4, Parcial 2 ServomotorDocumento8 páginasITA 8.3, MVVV, Tarea 4, Parcial 2 ServomotorMarco Viera ValadezAún no hay calificaciones
- Servo Motor Pablo Ascencion Hernandez Maquinas ElectricasDocumento7 páginasServo Motor Pablo Ascencion Hernandez Maquinas ElectricasAbigail HernandezAún no hay calificaciones
- Funcionamiento de Un Servo MotorDocumento6 páginasFuncionamiento de Un Servo MotorjoselinAún no hay calificaciones
- Tipos de actuadores eléctricos: motores DC, paso a paso y servomotoresDocumento37 páginasTipos de actuadores eléctricos: motores DC, paso a paso y servomotoresvanessaAún no hay calificaciones
- Arranque y Control de Velocidad de Motores de Corriente ContinuaDocumento4 páginasArranque y Control de Velocidad de Motores de Corriente ContinuaHenry Jhonson Coronado ChanameAún no hay calificaciones
- 41 - Sistemas ServocontroladosDocumento29 páginas41 - Sistemas Servocontroladosaleejandro10100% (2)
- ServomotoresDocumento5 páginasServomotoresRicardo Salinas LeyvaAún no hay calificaciones
- Servomotor ProyectoDocumento10 páginasServomotor ProyectoAlex JavierAún no hay calificaciones
- EXPOSICION1 RoboticaDocumento9 páginasEXPOSICION1 Robotica20130609Aún no hay calificaciones
- Practica 5 Actuadores YISEDocumento9 páginasPractica 5 Actuadores YISEYoselin SantiagoAún no hay calificaciones
- Motores eléctricos y su uso en robóticaDocumento9 páginasMotores eléctricos y su uso en robótica20130609Aún no hay calificaciones
- Ensayo 5 - PWM Y SERVOMOTORESDocumento6 páginasEnsayo 5 - PWM Y SERVOMOTORESAlexander LudeñaAún no hay calificaciones
- Qué Es Un ServomotorDocumento6 páginasQué Es Un ServomotorRoland JayAún no hay calificaciones
- S11 - Actuadores ElectricosDocumento46 páginasS11 - Actuadores Electricosfranklingiovanni100% (1)
- Que Es Un Servo MotorDocumento5 páginasQue Es Un Servo MotorRuben Mejía AlmeidaAún no hay calificaciones
- Act 2 Robotica Industrial OuapDocumento7 páginasAct 2 Robotica Industrial OuapCaca MonAún no hay calificaciones
- Tarea ServomotoresDocumento10 páginasTarea ServomotoresJorge A. CamposAún no hay calificaciones
- Servomotores (Lab 3 - Transductores)Documento11 páginasServomotores (Lab 3 - Transductores)ADRIANA TORRES CHIPATECUAAún no hay calificaciones
- Qué Es Un ServomotorDocumento8 páginasQué Es Un ServomotorRey ArturoAún no hay calificaciones
- Aplicación de Los Actuadores en La Instrumentación de ProcesosDocumento12 páginasAplicación de Los Actuadores en La Instrumentación de ProcesosLeo LázaroAún no hay calificaciones
- Resumen Servomotores y Motores Paso A PasoDocumento9 páginasResumen Servomotores y Motores Paso A PasoBrandonMillanAún no hay calificaciones
- Servomotores PDFDocumento12 páginasServomotores PDFauca56640123Aún no hay calificaciones
- Practica 4 Lds MDocumento9 páginasPractica 4 Lds MOscar MedellinAún no hay calificaciones
- Control de Motores AC y DCDocumento21 páginasControl de Motores AC y DCJesús Emanuel Urrutia33% (3)
- Microcontroladores PIC - MotoresDocumento14 páginasMicrocontroladores PIC - MotoresFernando Montenegro DiazAún no hay calificaciones
- Servo MotorDocumento4 páginasServo MotorJason Mucha BarzolaAún no hay calificaciones
- Ud04 Control MovimientoDocumento13 páginasUd04 Control MovimientomparejacursoAún no hay calificaciones
- Montaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109De EverandMontaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109Aún no hay calificaciones
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209De EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Calificación: 5 de 5 estrellas5/5 (2)
- Montaje de centros de transformación. ELEE0209De EverandMontaje de centros de transformación. ELEE0209Aún no hay calificaciones
- Yacimiento de Petroleo Saturado (1) 23Documento3 páginasYacimiento de Petroleo Saturado (1) 23NESTOR CUCUNA CALIZAYAAún no hay calificaciones
- Cuál Es La Estructura de Un Informe de Lectura VIDocumento4 páginasCuál Es La Estructura de Un Informe de Lectura VIMANQUITA RAún no hay calificaciones
- Aplicaciones LinealesDocumento16 páginasAplicaciones LinealesHenry HAún no hay calificaciones
- Dolor de GargantaDocumento3 páginasDolor de GargantaRuperto CahuanaAún no hay calificaciones
- Qué Es La Flor de JamaicaDocumento10 páginasQué Es La Flor de JamaicaJose Martin Pereira OrtegaAún no hay calificaciones
- GABADocumento6 páginasGABACL Eunice100% (1)
- Carta NotarialDocumento1 páginaCarta NotarialLalitoSangamaAún no hay calificaciones
- Guia-Pensamiento AlgorítmicoDocumento1 páginaGuia-Pensamiento AlgorítmicoDIEGO ARMANDO DIAZ SUAREZAún no hay calificaciones
- Mielinización PSTDocumento52 páginasMielinización PSTJessica EscobarAún no hay calificaciones
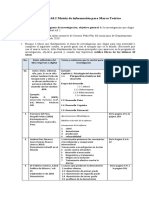
- A8.2 Guía Matriz Información Marco Teórico - 1Documento2 páginasA8.2 Guía Matriz Información Marco Teórico - 1Evelyn OrdoñezAún no hay calificaciones
- Currículum Mariana MendozaDocumento2 páginasCurrículum Mariana MendozaMariana100% (1)
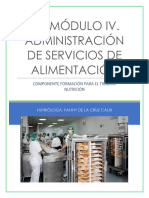
- Administración de Servicios de AlimentosDocumento48 páginasAdministración de Servicios de Alimentospj7gqjgnydAún no hay calificaciones
- HUAWEI Band 4 Pro Gu A de Usuario - (TER-B19S, 01, es-ES)Documento31 páginasHUAWEI Band 4 Pro Gu A de Usuario - (TER-B19S, 01, es-ES)Mauricio Armando Nuñez PerezAún no hay calificaciones
- CLASE INSECTA HemipteraDocumento87 páginasCLASE INSECTA HemipteraJenifer MedinaAún no hay calificaciones
- Sem 9Documento3 páginasSem 9PERCY VITON DIAZAún no hay calificaciones
- Instrumentacion Basica de Procesos IndusDocumento64 páginasInstrumentacion Basica de Procesos IndusdeysiAún no hay calificaciones
- Hipertension ArterialDocumento16 páginasHipertension ArterialCaro GuevaraAún no hay calificaciones
- Ordenamiento Territorial Ensayo 1Documento4 páginasOrdenamiento Territorial Ensayo 1David Huertas100% (1)
- Actividad de Agua en Los AlimentosDocumento33 páginasActividad de Agua en Los AlimentosJacquelineLisetVargasVergaraAún no hay calificaciones
- El Proceso de La Toma de DecisionesDocumento6 páginasEl Proceso de La Toma de DecisionesMariana RojasAún no hay calificaciones
- Plastiteja AtsaDocumento1 páginaPlastiteja AtsaJustino Garcia LopezAún no hay calificaciones
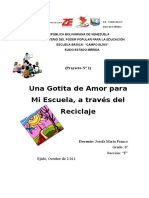
- Ambientando mi escuela a través del reciclajeDocumento18 páginasAmbientando mi escuela a través del reciclajedelvib rom100% (1)
- Tabla Estadística y Medidas de Tendencia Central2Documento3 páginasTabla Estadística y Medidas de Tendencia Central2kust100% (3)
- Código de 3 Direcciones ParteDocumento17 páginasCódigo de 3 Direcciones ParteHosni JuarezAún no hay calificaciones
- Suite BMC Remedy IT Service ManagementDocumento4 páginasSuite BMC Remedy IT Service ManagementÁngel Alonso RodríguezAún no hay calificaciones
- Junta cementicia Alfacolor 5-15Documento3 páginasJunta cementicia Alfacolor 5-15Ruly SCAún no hay calificaciones
- Capitulo 3 Analisis de SemillasDocumento12 páginasCapitulo 3 Analisis de Semillaslarry duarteAún no hay calificaciones
- Casa de interés social en Tlaxcala con 24.79 m2 de cimentaciónDocumento22 páginasCasa de interés social en Tlaxcala con 24.79 m2 de cimentaciónLalo RdguezAún no hay calificaciones