También podría gustarte
- Puesta en marcha de sistemas de automatización industrial. ELEM0311De EverandPuesta en marcha de sistemas de automatización industrial. ELEM0311Calificación: 3 de 5 estrellas3/5 (1)
- Carta Notarial para Cambio de Junta DirectivaDocumento56 páginasCarta Notarial para Cambio de Junta DirectivaAndres Tamayo Rivera100% (2)
- Compilador C CCS y Simulador Proteus para Microcontroladores PICDe EverandCompilador C CCS y Simulador Proteus para Microcontroladores PICCalificación: 2.5 de 5 estrellas2.5/5 (5)
- (ACV-S08) Ejercicios 08 - ECVDocumento5 páginas(ACV-S08) Ejercicios 08 - ECVJonny Zamudio0% (1)
- Practica 2 - Control de Carro BluettoothDocumento8 páginasPractica 2 - Control de Carro BluettoothRaymundo LopezAún no hay calificaciones
- Análisis de caso práctico de negociación empresarialDocumento3 páginasAnálisis de caso práctico de negociación empresarialSAUL SALGADO M.Aún no hay calificaciones
- El PLC IdealDocumento39 páginasEl PLC IdealOscar TorresAún no hay calificaciones
- Diseño y Construcción de Un Robot Seguidor de LíneaDocumento8 páginasDiseño y Construcción de Un Robot Seguidor de LíneaDeyvis Gonzales Guevara0% (1)
- Sesión de Aprendizaje. Teorema de Thales en GeoclicDocumento2 páginasSesión de Aprendizaje. Teorema de Thales en Geoclicmarinaciencias100% (2)
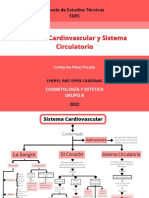
- Sistema CardiovascularDocumento3 páginasSistema CardiovascularANGIE CAROLINA DURAN CARDENASAún no hay calificaciones
- Robot Seguidor Resuelve LaberintosDocumento6 páginasRobot Seguidor Resuelve LaberintosChristian QuindeAún no hay calificaciones
- El Efecto Dunning-Kruger y cómo reconocer a un incompetenteDocumento10 páginasEl Efecto Dunning-Kruger y cómo reconocer a un incompetenteJuanita DomínguezAún no hay calificaciones
- Robot Seguidor Resuelve LaberintosDocumento9 páginasRobot Seguidor Resuelve LaberintosAlejandro RojasAún no hay calificaciones
- Control de Motor Brushlees Sensorless PDFDocumento67 páginasControl de Motor Brushlees Sensorless PDFJaime FranciscoAún no hay calificaciones
- Informe Carrro Control RemotoDocumento4 páginasInforme Carrro Control RemotoFajardo Acosta Julian Camilo50% (2)
- Anexo 1 InvestigacionDocumento8 páginasAnexo 1 InvestigacionVanessa GomezAún no hay calificaciones
- Brazo Robotico - FinalDocumento14 páginasBrazo Robotico - FinalAlan SalgadoAún no hay calificaciones
- PLC Arduino PaperDocumento5 páginasPLC Arduino PaperAlexis ChafloqueAún no hay calificaciones
- Avance de Carro Seguidor de Línea Con ArduinoDocumento8 páginasAvance de Carro Seguidor de Línea Con ArduinoDario MayancelaAún no hay calificaciones
- Diseño de Un PLC Con MicrocontroladorDocumento26 páginasDiseño de Un PLC Con MicrocontroladorLuz Elena M. PossoAún no hay calificaciones
- Proyecto Gripper Flexible en 3DDocumento12 páginasProyecto Gripper Flexible en 3Dnajerac000Aún no hay calificaciones
- TrípticoDocumento4 páginasTrípticoErick Joel ClaudioAún no hay calificaciones
- Avance de Carro Seguidor de Línea Con ArduinoDocumento8 páginasAvance de Carro Seguidor de Línea Con ArduinoDario MayancelaAún no hay calificaciones
- PPerfil de Grado CrisDocumento13 páginasPPerfil de Grado CrisCristhian ChoqueAún no hay calificaciones
- Practica 15Documento6 páginasPractica 15andresjoen29Aún no hay calificaciones
- Lab04 - Proyecto Mecatrónicos - Quispe-Romero-Steven - C16BDocumento9 páginasLab04 - Proyecto Mecatrónicos - Quispe-Romero-Steven - C16BSteven Dave QRAún no hay calificaciones
- Autómatas ProgramablesDocumento8 páginasAutómatas ProgramablesrayAún no hay calificaciones
- Control de motorreductor con ArduinoDocumento9 páginasControl de motorreductor con ArduinoJonathan ReyesAún no hay calificaciones
- Memoria TecnicaDocumento24 páginasMemoria TecnicaJair PachacamaAún no hay calificaciones
- Título Del Proyecto de RoboticaDocumento15 páginasTítulo Del Proyecto de RoboticaYilmer Locutor DjyilmerAún no hay calificaciones
- Marco TeóricoDocumento5 páginasMarco TeóricoElizabeth InoñanAún no hay calificaciones
- Tareas y Proyecto EPI - Version 8 - PAO 2 2022Documento22 páginasTareas y Proyecto EPI - Version 8 - PAO 2 2022Teddy Oñate FreireAún no hay calificaciones
- Carro Evita ObstaculosDocumento5 páginasCarro Evita ObstaculosGemy Carolina Zam VidalAún no hay calificaciones
- Brazo Robotico - AnteproyectoDocumento7 páginasBrazo Robotico - AnteproyectoAlan MartínezAún no hay calificaciones
- Proyecto Carro ArduinoDocumento17 páginasProyecto Carro ArduinoherreraroperojosejohanAún no hay calificaciones
- Control de Motores BLDC con LPCXpresso y SensoresDocumento7 páginasControl de Motores BLDC con LPCXpresso y SensoresCarlos ValdiviesoAún no hay calificaciones
- Actividades y MetodologíasDocumento7 páginasActividades y MetodologíasANGIE CAROLINA DURAN CARDENASAún no hay calificaciones
- Control de Brazo Robótico de 5 Grados de LibertadDocumento15 páginasControl de Brazo Robótico de 5 Grados de LibertadVictor CondoriAún no hay calificaciones
- Análisis de control de motor BLDC para vehículos eléctricosDocumento20 páginasAnálisis de control de motor BLDC para vehículos eléctricosDiego BorregoAún no hay calificaciones
- Sustentacion ProyectoDocumento14 páginasSustentacion ProyectoPedro JerexAún no hay calificaciones
- Proyectos Electricos para Edificaciones 0423 (Brochure)Documento2 páginasProyectos Electricos para Edificaciones 0423 (Brochure)Franklin GonzalesAún no hay calificaciones
- hgonzalez,+Vol12N1 2018 16+de+julio+de+2019-66-73Documento8 páginashgonzalez,+Vol12N1 2018 16+de+julio+de+2019-66-73william alexander laverde chaparroAún no hay calificaciones
- Montesdeoca.J - TalleresSemana - 29 Mayo - 2junio - 2023 - MICRODocumento10 páginasMontesdeoca.J - TalleresSemana - 29 Mayo - 2junio - 2023 - MICROJoshua MontesdeocaAún no hay calificaciones
- Reporte Técnico de Desarrollo MicrocontroladoresDocumento10 páginasReporte Técnico de Desarrollo MicrocontroladoresHerendira PerezAún no hay calificaciones
- Anteproyecto Control 2docxDocumento19 páginasAnteproyecto Control 2docxalbertAún no hay calificaciones
- Proyecto de PLCDocumento9 páginasProyecto de PLCVictor ContrerasAún no hay calificaciones
- Diseño e Implementación de Robot Velocista de Competencia - POSTERDocumento1 páginaDiseño e Implementación de Robot Velocista de Competencia - POSTERAlex Alvarez Huillca100% (1)
- Excavadora Autoamtica Con Arduino AutoRecoveredDocumento1 páginaExcavadora Autoamtica Con Arduino AutoRecoveredAlonsoHidalgoAún no hay calificaciones
- Tarea Final Segundo Parcial-AriasDocumento13 páginasTarea Final Segundo Parcial-AriasStalin AriasAún no hay calificaciones
- Informe Proyecto Integrador Robot Planificador de Trayectorias Con PID-2020B-2DO CorteDocumento8 páginasInforme Proyecto Integrador Robot Planificador de Trayectorias Con PID-2020B-2DO CorteSergio Andres Fajardo SaldarriagaAún no hay calificaciones
- Laboratorio de Sistemas Electronicos - Modelo Fundamental Brazo RoboticoDocumento7 páginasLaboratorio de Sistemas Electronicos - Modelo Fundamental Brazo RoboticoallgamerAún no hay calificaciones
- LadderDocumento14 páginasLadderAlvaro ChoqueAún no hay calificaciones
- Proyecto Microelectronica en RFDocumento31 páginasProyecto Microelectronica en RFLeonardo Rommel Escalante100% (1)
- Lab02 - Definición Del Proyecto - Quispe-Romero-Steven - C16B PDFDocumento9 páginasLab02 - Definición Del Proyecto - Quispe-Romero-Steven - C16B PDFSteven Dave QRAún no hay calificaciones
- FolletoDocumento8 páginasFolletoAnibal Raynol Medrano ValeraAún no hay calificaciones
- InformeDocumento5 páginasInformeWagner RamirezAún no hay calificaciones
- Residencias Profesionales-Diseño Electrico de Una Estacion SemiautomaticaDocumento58 páginasResidencias Profesionales-Diseño Electrico de Una Estacion SemiautomaticaDomus InteligenteAún no hay calificaciones
- Guia Automatismo BasicoDocumento119 páginasGuia Automatismo BasicoalanAún no hay calificaciones
- Mapa Conceptual Microcontroladores (Tipos y Clasificación)Documento8 páginasMapa Conceptual Microcontroladores (Tipos y Clasificación)SAMANTHA LOPEZ MONTALVOAún no hay calificaciones
- Brochure AltiumDocumento14 páginasBrochure Altiumjorgedorador0Aún no hay calificaciones
- Capitulo2 29-12-20Documento9 páginasCapitulo2 29-12-20Yoshua parionaAún no hay calificaciones
- Practica de Temas SelectosDocumento11 páginasPractica de Temas SelectosCindy DiazAún no hay calificaciones
- Potencia 1 Previo 5Documento8 páginasPotencia 1 Previo 5Daniel Ñahuis TisnadoAún no hay calificaciones
- PIC 16F887 PeriféricosDocumento70 páginasPIC 16F887 PeriféricosErnesto NetoAún no hay calificaciones
- Módulo ProyectosDocumento5 páginasMódulo ProyectosAydee Lizeth Mamani DonaireAún no hay calificaciones
- Informe DSP FinalDocumento47 páginasInforme DSP FinalDiego Rey TapiaAún no hay calificaciones
- Actividad de Laboratorio 1Documento13 páginasActividad de Laboratorio 1ANGIE CAROLINA DURAN CARDENASAún no hay calificaciones
- Actividades y MetodologíasDocumento7 páginasActividades y MetodologíasANGIE CAROLINA DURAN CARDENASAún no hay calificaciones
- Un Estudio Comparativo de PDocumento1 páginaUn Estudio Comparativo de PANGIE CAROLINA DURAN CARDENASAún no hay calificaciones
- Mda 3 2016 La B02Documento43 páginasMda 3 2016 La B02Arturo Valdez GuerreroAún no hay calificaciones
- Metodologías educativasDocumento10 páginasMetodologías educativasCharles Stiv Vásquez GómezAún no hay calificaciones
- Tarea 2.1 El Entorno ExternoDocumento6 páginasTarea 2.1 El Entorno ExternoJhosselyne VelasquezAún no hay calificaciones
- Yudin Trabajko Proyectos.Documento5 páginasYudin Trabajko Proyectos.Ángel Moisés Maucaylle AllccaAún no hay calificaciones
- Costo Estandar y DirectoDocumento4 páginasCosto Estandar y DirectoGalo Macias LopezAún no hay calificaciones
- Plan Plurianual Inversiones Regionalización 2015Documento508 páginasPlan Plurianual Inversiones Regionalización 2015Maritza AceroAún no hay calificaciones
- Caficultura Orgánica E Identidades en El Suroccidente de Colombia. El Caso de La Asociación de Caficultores Orgánicos de Colombia, Acoc - Café SanoDocumento191 páginasCaficultura Orgánica E Identidades en El Suroccidente de Colombia. El Caso de La Asociación de Caficultores Orgánicos de Colombia, Acoc - Café Sanolaura gutierrezAún no hay calificaciones
- Entidades Financieras InternacionalesDocumento11 páginasEntidades Financieras InternacionalesKAREN DEYSI CANDELARIA UJPAN IXCAYAAún no hay calificaciones
- Visión Del Desarrollo de Centro Poblado de San Alejandro ArregladoDocumento2 páginasVisión Del Desarrollo de Centro Poblado de San Alejandro ArregladobrakysAún no hay calificaciones
- Ficha Tecnica Mercedes Benz FurgonDocumento12 páginasFicha Tecnica Mercedes Benz FurgonDoctor WiFiAún no hay calificaciones
- Tutoría Investigación GRUPO 1Documento5 páginasTutoría Investigación GRUPO 1Ambar BozadaAún no hay calificaciones
- Ventajas de Realizar Prácticas Pre ProfesionalesDocumento3 páginasVentajas de Realizar Prácticas Pre ProfesionalesEliseo MilianAún no hay calificaciones
- Aguilar Huaman Maycol Examen IiDocumento5 páginasAguilar Huaman Maycol Examen IiPercy Tapara PalominoAún no hay calificaciones
- Allison Parra DOSDocumento3 páginasAllison Parra DOSTaycoxGamerYT PROAún no hay calificaciones
- Silabos Comunitaria ModeloDocumento10 páginasSilabos Comunitaria ModeloDarwin Quevedo QuenecheAún no hay calificaciones
- Perfil sociodemográfico de empleadosDocumento84 páginasPerfil sociodemográfico de empleadosAsesor Vendedor C.O: 707Aún no hay calificaciones
- Diptico Historia de La Universidad SJBDocumento2 páginasDiptico Historia de La Universidad SJBPoesíaArawiyAún no hay calificaciones
- Resumen cultura identidadDocumento5 páginasResumen cultura identidadDaniel EstupiñanAún no hay calificaciones
- Folleto Oce Importadores SumaDocumento8 páginasFolleto Oce Importadores SumaRaúl Jr100% (1)
- Modelo Territorial 2010 2060Documento343 páginasModelo Territorial 2010 2060brian121S1A100% (1)
- Pets LaboratorioDocumento2 páginasPets LaboratorioEliberth Huachito YncaAún no hay calificaciones
- Integración de tabletas en el aprendizaje de ComunicaciónDocumento12 páginasIntegración de tabletas en el aprendizaje de Comunicaciónmaritza mamaniAún no hay calificaciones
- Control de InventarioDocumento4 páginasControl de InventarioRonal Bolivar MendozaAún no hay calificaciones
- Ensayo ApsDocumento13 páginasEnsayo ApsDaniel PonceAún no hay calificaciones
- Investigacion Formativa Aimituma SumaDocumento7 páginasInvestigacion Formativa Aimituma SumaIndira Aimituma NinaAún no hay calificaciones