También podría gustarte
- Menu Semanal Dieta Mediterranea JPG - 5b9f28b7Documento1 páginaMenu Semanal Dieta Mediterranea JPG - 5b9f28b7Valeria Ibañez100% (3)
- Tejido A Dos AgujasDocumento12 páginasTejido A Dos AgujasLilian Mayorga100% (4)
- Matriz Riesgos SenaDocumento7 páginasMatriz Riesgos SenaAnonymous 81ymoLN743% (7)
- Automatización Industrial, AplicacionesDocumento132 páginasAutomatización Industrial, AplicacionesGuillermo Aguilar CórdovaAún no hay calificaciones
- Curso Eléctrico R-30iBDocumento38 páginasCurso Eléctrico R-30iBjose romeroAún no hay calificaciones
- Procedimiento Cambio de Pilas y Calibracion Robots FanucDocumento11 páginasProcedimiento Cambio de Pilas y Calibracion Robots FanucMauricio GassmanAún no hay calificaciones
- Cuestionario SalamancaDocumento3 páginasCuestionario Salamancakatita89100% (3)
- PSI6XCX.757 - Programacion Con BOS6000Documento220 páginasPSI6XCX.757 - Programacion Con BOS6000Giulio Cesare100% (1)
- Curso Aplicativo FanucDocumento64 páginasCurso Aplicativo FanucMauricio Gassman100% (2)
- Cómo Rezar La Misa Tradicional.Documento101 páginasCómo Rezar La Misa Tradicional.ruben100% (1)
- Manual de Usuario ABB (Reparado)Documento30 páginasManual de Usuario ABB (Reparado)ELVIS AGUILAR HUERTAAún no hay calificaciones
- Prueba Fuerza 7 BasicoDocumento3 páginasPrueba Fuerza 7 BasicoCarolina OlivaresAún no hay calificaciones
- CG Training 2017 PAW IPDocumento191 páginasCG Training 2017 PAW IPLeandro RobertoAún no hay calificaciones
- Cortes ComercialesDocumento9 páginasCortes ComercialesCarlos Luis Sanchez AquichireAún no hay calificaciones
- Dtos de Mantenimiento R1000ia M410icDocumento10 páginasDtos de Mantenimiento R1000ia M410iccHeQuE EzequielAún no hay calificaciones
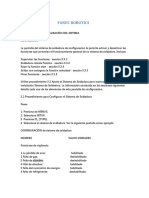
- Configuracion Del Sistema Fanuc Robotics PDFDocumento4 páginasConfiguracion Del Sistema Fanuc Robotics PDFVik TulaAún no hay calificaciones
- Manual Inicio ROBOGUIDE - OdtDocumento6 páginasManual Inicio ROBOGUIDE - Odtfirst_second12Aún no hay calificaciones
- Clase1 Desbloquea Tu Cerebro PDFDocumento7 páginasClase1 Desbloquea Tu Cerebro PDFErika HernandezAún no hay calificaciones
- Regulador UIR (087107 02 UI-ES)Documento130 páginasRegulador UIR (087107 02 UI-ES)miguel martinez100% (1)
- Controller R30iBDocumento15 páginasController R30iBJean ZacaríasAún no hay calificaciones
- Curso Basico Robot Fanuc UpaDocumento57 páginasCurso Basico Robot Fanuc UpaRene Axel Montes RochaAún no hay calificaciones
- Visual Completo PDFDocumento242 páginasVisual Completo PDFAlhernan Hernandez100% (1)
- Instrumentación Electrónica Avanzada-Instrumentación InteligenteDocumento88 páginasInstrumentación Electrónica Avanzada-Instrumentación InteligenteMarco Machorro Valencia100% (1)
- Procedimiento para Preconfigurar Robots de Soldadura Fanuc v.ACDocumento32 páginasProcedimiento para Preconfigurar Robots de Soldadura Fanuc v.ACJose Guillermo vazquez reyesAún no hay calificaciones
- Ladder MotomanDocumento9 páginasLadder MotomanDaniel GarciaAún no hay calificaciones
- Manual Robot KukaDocumento404 páginasManual Robot Kukajavier jassoAún no hay calificaciones
- Programmation EsDocumento145 páginasProgrammation EsDiego RomeroAún no hay calificaciones
- Curso Robots Fanuc R30ib Nivel IIDocumento55 páginasCurso Robots Fanuc R30ib Nivel IIJoanFraCanoAún no hay calificaciones
- Programacion IRC5 ABBDocumento289 páginasProgramacion IRC5 ABBMerced HernandezAún no hay calificaciones
- Ponencia Fanuc Arctool Jai2010Documento31 páginasPonencia Fanuc Arctool Jai2010Jose ArandaAún no hay calificaciones
- Evaluacion Unidad 1 LenguajeDocumento4 páginasEvaluacion Unidad 1 LenguajeMacarena Valenzuela MendezAún no hay calificaciones
- Power Mate I - Controlador FanucDocumento10 páginasPower Mate I - Controlador Fanucmjs_cbaAún no hay calificaciones
- 01 - Ast Cambio de Encoder Robot FanucDocumento3 páginas01 - Ast Cambio de Encoder Robot FanucEduardo BrisoAún no hay calificaciones
- Robot Arburg para Arburg 720S 3200 2100 PDFDocumento398 páginasRobot Arburg para Arburg 720S 3200 2100 PDFprusikAún no hay calificaciones
- Electrónica - Dispositivos y Aplicaciones PDFDocumento382 páginasElectrónica - Dispositivos y Aplicaciones PDFDavid ClavonAún no hay calificaciones
- PSI6xCx 357 Mit BOS6000 2a ES 1Documento204 páginasPSI6xCx 357 Mit BOS6000 2a ES 1Eduardo0% (1)
- As 109995 Iv2 Um 868MX KMX MX 2020 1Documento424 páginasAs 109995 Iv2 Um 868MX KMX MX 2020 1MegaTomanyAún no hay calificaciones
- Robotica MotofilDocumento19 páginasRobotica Motofilcoronado777Aún no hay calificaciones
- Manual FNUC EspañolDocumento69 páginasManual FNUC EspañolFranAún no hay calificaciones
- Robot Panasonic Ya 1na ErroresDocumento13 páginasRobot Panasonic Ya 1na ErroresAlejandroAún no hay calificaciones
- Operacion Basica Fanuc May13Documento222 páginasOperacion Basica Fanuc May13Carlos Musella100% (1)
- Mezen 292 003 - Ez03 02 (CFDL)Documento44 páginasMezen 292 003 - Ez03 02 (CFDL)Javier BravoAún no hay calificaciones
- Fanuc Handlingtool Rev e PDFDocumento240 páginasFanuc Handlingtool Rev e PDFDANIELAún no hay calificaciones
- Sepro Visual 1Documento2 páginasSepro Visual 1Guillermo Aguilar Córdova100% (2)
- 210 - Tema - 1.montaje. AlumnosDocumento93 páginas210 - Tema - 1.montaje. Alumnospepita737476456556Aún no hay calificaciones
- B-81685ES - 02 - LRM 200ibDocumento226 páginasB-81685ES - 02 - LRM 200ibManuel Gil BotiaAún no hay calificaciones
- MotoTraining PDFDocumento12 páginasMotoTraining PDF22pinkAún no hay calificaciones
- Sepro Máquina de InyecciónDocumento79 páginasSepro Máquina de InyecciónAarón DíazAún no hay calificaciones
- Informe Practica de RoboticaDocumento7 páginasInforme Practica de Roboticazintia mezaAún no hay calificaciones
- ABB Es ArcWELDDocumento174 páginasABB Es ArcWELDJavi100% (1)
- KRC 2 - Sistema de Robot - Release v4.1Documento23 páginasKRC 2 - Sistema de Robot - Release v4.1Nick RivieraAún no hay calificaciones
- Automatizacion de Maquinas CNC GSK Jim MDocumento82 páginasAutomatizacion de Maquinas CNC GSK Jim MRivera Jim TomAún no hay calificaciones
- Robot MotomanDocumento27 páginasRobot MotomanCaesar AlexanderAún no hay calificaciones
- Dokumen - Tips - Error Codes R j3 Fanuc - En.esDocumento237 páginasDokumen - Tips - Error Codes R j3 Fanuc - En.esRodolfo ZavalaAún no hay calificaciones
- 4 Descripcion GeneralDocumento24 páginas4 Descripcion Generaledgar olveraAún no hay calificaciones
- 6 Opciones de ConfiguracionDocumento172 páginas6 Opciones de Configuracionedgar olveraAún no hay calificaciones
- Manual de Instalacion Robot KawasakiDocumento18 páginasManual de Instalacion Robot Kawasakiadriana zelayaAún no hay calificaciones
- Flexpendant Abb PDFDocumento366 páginasFlexpendant Abb PDFOmar RamosAún no hay calificaciones
- Manual de Equipo de SoldaduraDocumento24 páginasManual de Equipo de SoldaduraAlan RodolfoAún no hay calificaciones
- Kuka KR C4Documento2 páginasKuka KR C4Santos Vásquez PumaAún no hay calificaciones
- Memoria. Automatización de Una Planta Plegadora de Chapa Con Robot ABBDocumento92 páginasMemoria. Automatización de Una Planta Plegadora de Chapa Con Robot ABBMauricio Valenzuela VegaAún no hay calificaciones
- Calibración y Masterizado FanucDocumento2 páginasCalibración y Masterizado FanucMerced HernandezAún no hay calificaciones
- B-83555SP - 05 R-30iB Mate Open AirDocumento218 páginasB-83555SP - 05 R-30iB Mate Open AirGuillermo Aguilar CórdovaAún no hay calificaciones
- Kuka FoldDocumento5 páginasKuka FoldRafael Ortega SaineroAún no hay calificaciones
- Mantenimiento Robot ABBDocumento2 páginasMantenimiento Robot ABBRene Axel Montes RochaAún no hay calificaciones
- Checklist de Cuidados Básicos para Robot UR5Documento1 páginaChecklist de Cuidados Básicos para Robot UR5Cesar ArellanoAún no hay calificaciones
- Instalacion y Cableado NX100 MotomanDocumento166 páginasInstalacion y Cableado NX100 MotomanCesar FloresAún no hay calificaciones
- Temario Cursos KukaDocumento4 páginasTemario Cursos KukaRaul RojasAún no hay calificaciones
- Mantenimiento KR C2Documento19 páginasMantenimiento KR C2arturo100% (1)
- Practica Robot MotomanDocumento3 páginasPractica Robot MotomanCesarAún no hay calificaciones
- Excel Modelo - Eval. FinalDocumento24 páginasExcel Modelo - Eval. FinalGustavo Esperidion SanchezAún no hay calificaciones
- Energías Renovables Marinas, Recursos Energéticos de La TierraDocumento29 páginasEnergías Renovables Marinas, Recursos Energéticos de La TierraGuillermo Aguilar CórdovaAún no hay calificaciones
- Diseño Scada para InvernaderoDocumento130 páginasDiseño Scada para InvernaderoGuillermo Aguilar CórdovaAún no hay calificaciones
- Candado ElectrónicoDocumento14 páginasCandado ElectrónicoGuillermo Aguilar CórdovaAún no hay calificaciones
- Armónicos C y Filtros ActivosDocumento86 páginasArmónicos C y Filtros ActivosGuillermo Aguilar CórdovaAún no hay calificaciones
- Energía Solar, Diseño de InstalaciónDocumento34 páginasEnergía Solar, Diseño de InstalaciónGuillermo Aguilar CórdovaAún no hay calificaciones
- CapÃ-tulo 2 - Fundamentos Teã RicosDocumento49 páginasCapÃ-tulo 2 - Fundamentos Teã Ricoscutlass861Aún no hay calificaciones
- Tema2 CombinacionalesDocumento18 páginasTema2 CombinacionalesMar Badiola SolanaAún no hay calificaciones
- Red Can en Sistema SCADADocumento6 páginasRed Can en Sistema SCADAGuillermo Aguilar CórdovaAún no hay calificaciones
- Introduccià N A La Energà - A FotovoltaicaDocumento20 páginasIntroduccià N A La Energà - A FotovoltaicaJulio Marco Flores QuispeAún no hay calificaciones
- Aprenda Pld's Principios y AplicacionesDocumento120 páginasAprenda Pld's Principios y AplicacionesNoe Hernández100% (1)
- Control y Instrumentacion en Planta Termica Solar PDFDocumento125 páginasControl y Instrumentacion en Planta Termica Solar PDFflor tazaAún no hay calificaciones
- Sistemas ScadaDocumento51 páginasSistemas ScadaAlex CadAún no hay calificaciones
- Pantallas UoledDocumento131 páginasPantallas UoledGuillermo Aguilar CórdovaAún no hay calificaciones
- Equilibrio TermicoDocumento14 páginasEquilibrio TermicoGuillermo Aguilar CórdovaAún no hay calificaciones
- RuidoDocumento1 páginaRuidoGuillermo Aguilar CórdovaAún no hay calificaciones
- 10 17.VNT VIU GenerDocumento19 páginas10 17.VNT VIU Generluis fernando ñustesAún no hay calificaciones
- GPS Junsun 7Documento13 páginasGPS Junsun 7Guillermo Aguilar CórdovaAún no hay calificaciones
- Capitulo 3. Acondicionamiento de SenalesDocumento19 páginasCapitulo 3. Acondicionamiento de SenalesDagoberto Ascanio RomeroAún no hay calificaciones
- B-83555SP - 05 R-30iB Mate Open AirDocumento218 páginasB-83555SP - 05 R-30iB Mate Open AirGuillermo Aguilar CórdovaAún no hay calificaciones
- Cinemática Direct Del Robot PDFDocumento72 páginasCinemática Direct Del Robot PDFGuillermo Aguilar CórdovaAún no hay calificaciones
- Manual BP ParaguayDocumento89 páginasManual BP Paraguayzen_1210100% (6)
- Exceso o Falta de GasDocumento1 páginaExceso o Falta de GasredservimaxAún no hay calificaciones
- NotasDocumento48 páginasNotasDieguito GarciaAún no hay calificaciones
- Cuaterniones Duales PDFDocumento12 páginasCuaterniones Duales PDFGuillermo Aguilar CórdovaAún no hay calificaciones
- Él BocónDocumento10 páginasÉl BocónjulioAún no hay calificaciones
- HP 245 G7 1m9x6lt-AbmDocumento1 páginaHP 245 G7 1m9x6lt-AbmCAMILO ANDRES VASQUEZAún no hay calificaciones
- Manual Rom Tool BoxDocumento5 páginasManual Rom Tool BoxOscar Adolfo Rios Castro100% (1)
- 09-28 Actividades - La - Hora - Del - CuentoDocumento8 páginas09-28 Actividades - La - Hora - Del - CuentoAleiska Victoria Gómez BetancourthAún no hay calificaciones
- Aashto Guia de Especificaciones para Puentes Peatonales 1997Documento10 páginasAashto Guia de Especificaciones para Puentes Peatonales 1997JommerAún no hay calificaciones
- Salmos Libro V 2023Documento36 páginasSalmos Libro V 2023AleSotoAún no hay calificaciones
- 17 REGLAS DEL FUTBOL Balonmano Basq AtleDocumento4 páginas17 REGLAS DEL FUTBOL Balonmano Basq AtleHeidi Solorzano de SalazarAún no hay calificaciones
- El Herrero de La Luna LlenaDocumento2 páginasEl Herrero de La Luna LlenaPascual Martinez EspinAún no hay calificaciones
- Planificacion 2°microciclo Pretemporada Futbol Femenino 2024Documento4 páginasPlanificacion 2°microciclo Pretemporada Futbol Femenino 2024Guillermina Echenique MentaAún no hay calificaciones
- Documentación Paso A Paso de Acceder A Una Cuenta en OdooDocumento9 páginasDocumentación Paso A Paso de Acceder A Una Cuenta en OdooMell CasanobaAún no hay calificaciones
- Practica 3Documento6 páginasPractica 3Dilan Martínez LizárragaAún no hay calificaciones
- FUENTES DE ORTIZ, Ed Maverick - AcordesDocumento2 páginasFUENTES DE ORTIZ, Ed Maverick - AcordesAlejandroVega100% (2)
- Observaciones As Built 24.06.2022Documento9 páginasObservaciones As Built 24.06.2022André Fernández QueaAún no hay calificaciones
- Unidad Didáctica 10 El Método MartenotDocumento3 páginasUnidad Didáctica 10 El Método MartenotJuan Miguel DuranAún no hay calificaciones
- Siglo XVII Siglo XIX 1916: Wynonie HarrisDocumento19 páginasSiglo XVII Siglo XIX 1916: Wynonie HarriscarloshAún no hay calificaciones
- Se Pueden Utilizar Distintos Métodos para Hacer Una OcarinaDocumento16 páginasSe Pueden Utilizar Distintos Métodos para Hacer Una OcarinalarizaAún no hay calificaciones
- Dieta 28 Dias MenuDocumento4 páginasDieta 28 Dias MenuVAún no hay calificaciones
- CCNA 3 Final Version 4.0Documento25 páginasCCNA 3 Final Version 4.0bartoreioAún no hay calificaciones
- CARETASDocumento8 páginasCARETASJohanna Oguis LeónAún no hay calificaciones
- Pepe No Te Rias GuiaDocumento15 páginasPepe No Te Rias Guiavanesa100% (1)
- En Su Mesa Hay Amor Canto de Entrada El Se Nor Nos Ha Reunido Junto A ElDocumento3 páginasEn Su Mesa Hay Amor Canto de Entrada El Se Nor Nos Ha Reunido Junto A ElAlex VazquezAún no hay calificaciones
- 250 - Dios Es Chiste PDFDocumento1 página250 - Dios Es Chiste PDFХьюгоAún no hay calificaciones
- Configuraciones para Winedt 6 PDFDocumento8 páginasConfiguraciones para Winedt 6 PDFMiguel R. ApazaAún no hay calificaciones