También podría gustarte
- Metodologico Flotante y Vuelta Atrás en Barra FijaDocumento4 páginasMetodologico Flotante y Vuelta Atrás en Barra FijaBlas Chinatti100% (1)
- Libro de Estilo Pecho o Braza RanaDocumento60 páginasLibro de Estilo Pecho o Braza RanaJosueMembreñoOchoa100% (1)
- Trampolin N1Documento45 páginasTrampolin N1Felipe Tapia LaraAún no hay calificaciones
- Habilidades Gimnásticas y ProgresionesDocumento2 páginasHabilidades Gimnásticas y Progresionesealvper50% (2)
- Unidad Didactica RUGBYDocumento30 páginasUnidad Didactica RUGBYensalazar186% (7)
- Ejercicios Fundamentales Gimnasia DeportivaDocumento34 páginasEjercicios Fundamentales Gimnasia DeportivaCelia Redondo López69% (16)
- Historia Del VoleyDocumento2 páginasHistoria Del Voleycrety lizetAún no hay calificaciones
- Modelo de Informe para Escuelas Deportivas Municipales 2021Documento3 páginasModelo de Informe para Escuelas Deportivas Municipales 2021JoseQuesoTicona100% (2)
- Gimnàstica ArtísticaDocumento19 páginasGimnàstica ArtísticaLaura Pages SolanoAún no hay calificaciones
- RONDADADocumento7 páginasRONDADAluismelilaroamguera100% (3)
- FlicDocumento28 páginasFlicMica SantalicesAún no hay calificaciones
- Corrección Estilos - Espalda Braza MariposaDocumento24 páginasCorrección Estilos - Espalda Braza Mariposanicemillie100% (1)
- Apunte Metodológico Gimnasia IDocumento23 páginasApunte Metodológico Gimnasia ImatiasAún no hay calificaciones
- Bloque 2 Aerobic y PilatesDocumento11 páginasBloque 2 Aerobic y Pilatesacroan82100% (1)
- Tecnicas de Gim 2Documento45 páginasTecnicas de Gim 2Braulio GonzalezAún no hay calificaciones
- Técnica Del Estilo CrolDocumento21 páginasTécnica Del Estilo CrolCarlos Abelardo Chang VillanuevaAún no hay calificaciones
- Biomecanica de La Brazada de Mariposa y PechoDocumento17 páginasBiomecanica de La Brazada de Mariposa y PechoConcepcion Lopez Rodas67% (3)
- Caracterizacion de La Gimnasia Artística Por Jorge Sierra BiomecánicaDocumento14 páginasCaracterizacion de La Gimnasia Artística Por Jorge Sierra BiomecánicaJorgeAún no hay calificaciones
- Habilidades Gimnásticas y AcrobáticasDocumento11 páginasHabilidades Gimnásticas y Acrobáticaspauremirez0% (1)
- Gimnasia 3Documento22 páginasGimnasia 3hector.fab2003Aún no hay calificaciones
- Metodologia de GimnasiaDocumento32 páginasMetodologia de GimnasiaFannylu Ladys67% (24)
- Depo Mini BasquetDocumento24 páginasDepo Mini BasquetCLUB LIBERTAD BOLIVIA - EL ALTOAún no hay calificaciones
- Práctica 7. MariposaDocumento14 páginasPráctica 7. Mariposajavinaber100% (3)
- Gimnacia ArtisticaDocumento52 páginasGimnacia ArtisticaMaría GarcíaAún no hay calificaciones
- Gradoos ArticularesDocumento29 páginasGradoos Articularesoriannys0% (1)
- Evaluación de Estilo EspaldaDocumento6 páginasEvaluación de Estilo Espaldadiana murayariAún no hay calificaciones
- Acrosport 5Documento4 páginasAcrosport 5remepe100% (1)
- Ficha de Gimnasia RondoDocumento2 páginasFicha de Gimnasia RondoCamilo J. Conrado100% (2)
- Gimnasia 3Documento67 páginasGimnasia 3Mica SantalicesAún no hay calificaciones
- Metodologia de La GimnasiaDocumento50 páginasMetodologia de La GimnasiasairapaulinaAún no hay calificaciones
- Tecnicas de Natacion PDFDocumento18 páginasTecnicas de Natacion PDFCarolina AcostaAún no hay calificaciones
- Espalda - Errores y CoreccionesDocumento10 páginasEspalda - Errores y CoreccionesPriscilaDiBartolo50% (2)
- Gimnasia Formativa PortafolioDocumento27 páginasGimnasia Formativa PortafolioKevin VelandiaAún no hay calificaciones
- Bases GimnasiaDocumento12 páginasBases GimnasiaMiguel Danilla0% (2)
- Sesiones 3º NataciónDocumento4 páginasSesiones 3º NataciónNacho PérezAún no hay calificaciones
- Educación Física. Atletismo Autor Varios AutoresDocumento54 páginasEducación Física. Atletismo Autor Varios AutoresCristian QuispeAún no hay calificaciones
- Planificacion N2Documento4 páginasPlanificacion N2Fran GarciaAún no hay calificaciones
- Tecnica y Metrodologia Del Estilo EspaldaDocumento2 páginasTecnica y Metrodologia Del Estilo EspaldaFrancisco BensiAún no hay calificaciones
- Clase 16 Parte 1 Lanzamiento de BalaDocumento35 páginasClase 16 Parte 1 Lanzamiento de BalaVANESA TROCCOLIAún no hay calificaciones
- Apuntes de AtletismoDocumento13 páginasApuntes de Atletismotriat78Aún no hay calificaciones
- ATLETISMODocumento14 páginasATLETISMOAnggiee Anggiee GchAún no hay calificaciones
- Parada de ManosDocumento6 páginasParada de ManosMalejita Ariza BernalAún no hay calificaciones
- Gimnasia ArtísticaDocumento11 páginasGimnasia ArtísticaPeter JoséAún no hay calificaciones
- ANÁLISIS BIOMECÁNICO DEL REMATE EN VOLEIBOL PresentaciónDocumento35 páginasANÁLISIS BIOMECÁNICO DEL REMATE EN VOLEIBOL PresentaciónAngie RoaAún no hay calificaciones
- TP Analisis de La MedialunaDocumento3 páginasTP Analisis de La MedialunaAndres BarraganAún no hay calificaciones
- Respiracion y Locomocion QuisaniDocumento2 páginasRespiracion y Locomocion QuisaniJULIA QUISANI CJUNOAún no hay calificaciones
- Modificaciones Reglas de Natación 2017 2019Documento4 páginasModificaciones Reglas de Natación 2017 2019Alvaro Covarrubias Bascuñate80% (5)
- La Historia de La Gimnasia DeportivaDocumento7 páginasLa Historia de La Gimnasia DeportivaMarco Reto Rodriguez67% (3)
- La Rueda o Media LunaDocumento4 páginasLa Rueda o Media LunaRonald PazAún no hay calificaciones
- Suports GimDocumento7 páginasSuports Gimjordi_mpAún no hay calificaciones
- Evaluacion - Habilidades Motrices Especificas 8ADocumento9 páginasEvaluacion - Habilidades Motrices Especificas 8AJonathan FredesAún no hay calificaciones
- SESIONES NATACIÓN (1º Primaria)Documento2 páginasSESIONES NATACIÓN (1º Primaria)Nacho Pérez100% (3)
- Voltereta Hacia AtrásDocumento4 páginasVoltereta Hacia Atrásdontworry_and_behappy76% (21)
- 1 Pecho Analisis de La Tecnica PDFDocumento23 páginas1 Pecho Analisis de La Tecnica PDFJuan David Valencia ToroAún no hay calificaciones
- Unidad III Principios de La HalterofiliaDocumento24 páginasUnidad III Principios de La Halterofiliaapi-404476145Aún no hay calificaciones
- Lanzamiento BalaDocumento9 páginasLanzamiento BalafelipeAún no hay calificaciones
- Los 200 Metros LisosDocumento26 páginasLos 200 Metros LisosJesús Samuel PáezAún no hay calificaciones
- EJERCICIOS de ZambullidasDocumento5 páginasEJERCICIOS de Zambullidasalex_gil_9210Aún no hay calificaciones
- Saltos en Profundidad. IVDocumento3 páginasSaltos en Profundidad. IVca_rl_4Aún no hay calificaciones
- Biomecanica de Las Articulaciones PerlaDocumento5 páginasBiomecanica de Las Articulaciones PerlaNoe Zarazua CortezAún no hay calificaciones
- Movimiento Del CuelloDocumento6 páginasMovimiento Del CuelloJhony Ariza cadenaAún no hay calificaciones
- Aplicaciones prácticas cinesiterapia en MMIIDe EverandAplicaciones prácticas cinesiterapia en MMIICalificación: 5 de 5 estrellas5/5 (1)
- Listados Sociedades Aceptadas A Reorganización A 31 de Marzo 2012.Xls-2Documento73 páginasListados Sociedades Aceptadas A Reorganización A 31 de Marzo 2012.Xls-2seminario centroAún no hay calificaciones
- Trabajos en Altura Con Escalera TelescópicaDocumento17 páginasTrabajos en Altura Con Escalera Telescópicadaferu84Aún no hay calificaciones
- Coaching Deportivo UD3Documento46 páginasCoaching Deportivo UD3Joao DiasAún no hay calificaciones
- Actividad 1. Voleibol 2Documento7 páginasActividad 1. Voleibol 2AlejandroAún no hay calificaciones
- La Lateralidad en El DeporteDocumento78 páginasLa Lateralidad en El Deportelorena HernandezAún no hay calificaciones
- 1 Contra 1 Entre Porteros y 1 Contra 1 Jugador-PorteroDocumento3 páginas1 Contra 1 Entre Porteros y 1 Contra 1 Jugador-PorteroEdith De'Los RiossAún no hay calificaciones
- Plan de ClaseDocumento41 páginasPlan de ClaseFernando Patricio ChiluizaAún no hay calificaciones
- Historia de La Lotería NacionalDocumento2 páginasHistoria de La Lotería Nacionalaburova05Aún no hay calificaciones
- Nombramiento Representante Legal Sociedad LimitadaDocumento18 páginasNombramiento Representante Legal Sociedad Limitadamajo torresAún no hay calificaciones
- Informe Prueba Diagnostica Inglés 2023 ListoDocumento3 páginasInforme Prueba Diagnostica Inglés 2023 ListoKATHERINE RAMOS100% (3)
- Juegos PredeportivosDocumento2 páginasJuegos PredeportivosLUIS CHILICAHUA PLAZAAún no hay calificaciones
- Guion Técnico Programa de RadioDocumento15 páginasGuion Técnico Programa de RadioJosé David AuquillasAún no hay calificaciones
- Practica 4 1089318Documento1 páginaPractica 4 1089318Randy GrullonAún no hay calificaciones
- Medidas de Dispersión de Una Muestra Estadistica: Datos Y Azar-2Documento10 páginasMedidas de Dispersión de Una Muestra Estadistica: Datos Y Azar-2JoaquinAún no hay calificaciones
- VV190406 Caso WembleyDocumento7 páginasVV190406 Caso WembleyJHAMES MAYCON JACO TORREJONAún no hay calificaciones
- Lista de One Feet 15-05-22Documento8 páginasLista de One Feet 15-05-22CarmenTovarMatuteAún no hay calificaciones
- DEPORTE para TodosDocumento12 páginasDEPORTE para TodosMarieAún no hay calificaciones
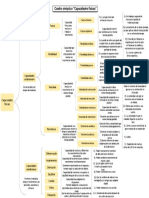
- Capacidades FísicasDocumento1 páginaCapacidades FísicasKarla CarbajalAún no hay calificaciones
- Historia Del FútbolDocumento8 páginasHistoria Del FútbolJulieta Calgaro CornalóAún no hay calificaciones
- Escuela de Canotaje y Kayak Polo.Documento2 páginasEscuela de Canotaje y Kayak Polo.Marco AntonioAún no hay calificaciones
- Sistema de Juego VoleyDocumento8 páginasSistema de Juego VoleyVASQUEZ ORIHUELA WINNY MAYERLYAún no hay calificaciones
- Actividad Regresion Lineal SimpleDocumento8 páginasActividad Regresion Lineal SimpleLucero VargasAún no hay calificaciones
- PDL 2 - 24Documento7 páginasPDL 2 - 24grandamia17Aún no hay calificaciones
- FFD 1Documento84 páginasFFD 1Maria HornilloAún no hay calificaciones
- Rutina Por Grupos MuscularesDocumento4 páginasRutina Por Grupos MuscularesTerry LautoAún no hay calificaciones
- Guia Completa Silent Hill OriginsDocumento14 páginasGuia Completa Silent Hill OriginsRugal Bernstein100% (1)
- MetaELE A2 LA Audios TranscripcionesDocumento14 páginasMetaELE A2 LA Audios TranscripcionesМария ГаврилюкAún no hay calificaciones
- GREEN-1-Sample Libro de InglesDocumento45 páginasGREEN-1-Sample Libro de Inglespaola valbuenaAún no hay calificaciones