También podría gustarte
- Problemas resueltos de electromagnetismo. Volumen I: ElectrostáticaDe EverandProblemas resueltos de electromagnetismo. Volumen I: ElectrostáticaAún no hay calificaciones
- CEM4042 Cap 1-2 - Análisis Vectorial Sadiku-2014Documento19 páginasCEM4042 Cap 1-2 - Análisis Vectorial Sadiku-2014Hector VergaraAún no hay calificaciones
- Vectores en R3Documento40 páginasVectores en R3Yadira Pampamallco AntayAún no hay calificaciones
- Operaciones Del Álgebra Vectorial, Unidades y Fuerza: Carlos Raúl Palencia PortilloDocumento13 páginasOperaciones Del Álgebra Vectorial, Unidades y Fuerza: Carlos Raúl Palencia PortilloMercis PadraAún no hay calificaciones
- VESTORESDocumento40 páginasVESTORESOleggValVilAún no hay calificaciones
- S1 Matba Ing WaDocumento52 páginasS1 Matba Ing WaMami MonadasAún no hay calificaciones
- Sesion 4Documento23 páginasSesion 4Gonzalo RiveraAún no hay calificaciones
- Vectores 2DDocumento30 páginasVectores 2Djulio cesarAún no hay calificaciones
- S1 Matba Ing Wa PDFDocumento73 páginasS1 Matba Ing Wa PDFvvvvhAún no hay calificaciones
- 1LimaSerranoJoseBernabe InfografiaDocumento25 páginas1LimaSerranoJoseBernabe InfografiaJose Bernabe Lima SerranoAún no hay calificaciones
- Teoria ElectromagneticaDocumento66 páginasTeoria ElectromagneticaReynaldoAún no hay calificaciones
- Trabajo Algebra 3er ParcialllllDocumento26 páginasTrabajo Algebra 3er ParcialllllYair BadilloAún no hay calificaciones
- Experiencia 3 - Descomposición y Paralelogramo de FuerzasDocumento6 páginasExperiencia 3 - Descomposición y Paralelogramo de FuerzasDavid J. Sandoval GarciaAún no hay calificaciones
- Vectores Teoria 2022Documento35 páginasVectores Teoria 2022Jhon CLAún no hay calificaciones
- 2.2 Vectores 2D y 3DDocumento47 páginas2.2 Vectores 2D y 3DCEDEYN CENTRO DE ESTUDIOS Y NIVELACIONES100% (1)
- Semana9 - Vectores, Norma, Producto InternoDocumento12 páginasSemana9 - Vectores, Norma, Producto InternoRODRIGO TOMAS CERNA MENDOZAAún no hay calificaciones
- VECTORES. Representación Gráfica.Documento25 páginasVECTORES. Representación Gráfica.AlanysAún no hay calificaciones
- UntitledDocumento48 páginasUntitledJulio Vidal. Q.C.Aún no hay calificaciones
- Espacios Vectoriales y Transformaciones LinealesDocumento18 páginasEspacios Vectoriales y Transformaciones LinealesAlejandra Garcia100% (2)
- Cap - 1 - 02 - Puntos, Vectores, TensoresDocumento81 páginasCap - 1 - 02 - Puntos, Vectores, TensoresCristian Cardenas RiveraAún no hay calificaciones
- Clase 2 Vectores en El PlanoDocumento35 páginasClase 2 Vectores en El PlanoIngCarlos BarreraAún no hay calificaciones
- Genially 63e3ae8731ff700019084781Documento37 páginasGenially 63e3ae8731ff700019084781Juan VasquezAún no hay calificaciones
- Exposicion Algebra Lineal s12Documento13 páginasExposicion Algebra Lineal s12EVELIN PAOLA GUAMAN CALUGUILLINAún no hay calificaciones
- Cap - 1 - 02 - Puntos, Vectores, TensoresDocumento113 páginasCap - 1 - 02 - Puntos, Vectores, TensoresteodoroAún no hay calificaciones
- S01.s1. - Princi-Basicos-Fundame - Algebra Vectorial - Marzo - 2021 - UTPDocumento41 páginasS01.s1. - Princi-Basicos-Fundame - Algebra Vectorial - Marzo - 2021 - UTPNayelly GironAún no hay calificaciones
- Vector UnitarioDocumento5 páginasVector UnitarioOscar ArancibiaAún no hay calificaciones
- Unidad II Algebra VectorialDocumento15 páginasUnidad II Algebra VectorialJJOCAún no hay calificaciones
- Diapositivas - Métodos para El Cálculo de Valores y Vectores Propios y Gradiente, Divergencia y RotacionalDocumento20 páginasDiapositivas - Métodos para El Cálculo de Valores y Vectores Propios y Gradiente, Divergencia y RotacionalJarri JhomAún no hay calificaciones
- VectoresDocumento25 páginasVectoresVidal100% (1)
- 02 Vectores - 085303 PDFDocumento20 páginas02 Vectores - 085303 PDFValentina Jacqueline Paredes GomezAún no hay calificaciones
- Vectores 2024-IDocumento33 páginasVectores 2024-IPetiza CMAún no hay calificaciones
- Clase 1-Unidad 1-CV-Lu-04-10-21Documento18 páginasClase 1-Unidad 1-CV-Lu-04-10-21Victor MoranAún no hay calificaciones
- Maraton VectoresDocumento21 páginasMaraton VectoresppppppAún no hay calificaciones
- Fausto Estatica LuisDocumento60 páginasFausto Estatica LuisFelipe UrgelAún no hay calificaciones
- Fem 202250 04 Teoremas IntegralesDocumento17 páginasFem 202250 04 Teoremas IntegralesOscar BalarezoAún no hay calificaciones
- Unidad I - Sem 1Documento17 páginasUnidad I - Sem 1Carlos CarpioAún no hay calificaciones
- Informe 1Documento6 páginasInforme 1Luis RodriguezAún no hay calificaciones
- Cap IiDocumento15 páginasCap IiBelen SoteloAún no hay calificaciones
- Resumen Analisis Vectorial Jose Ancianis CI 28409383Documento3 páginasResumen Analisis Vectorial Jose Ancianis CI 28409383JoseAncianisAún no hay calificaciones
- Sesion 01 2020 PDFDocumento33 páginasSesion 01 2020 PDFWILLIAMS ESTEWARD CASTILLO MARTINEZAún no hay calificaciones
- Aula 2 Vectores ErickDocumento38 páginasAula 2 Vectores ErickJesus James Santiago GarciaAún no hay calificaciones
- Cantidades Vectoriales, Escalares y Vectores I, J, KDocumento8 páginasCantidades Vectoriales, Escalares y Vectores I, J, KJosé Antonio Salinas muñozAún no hay calificaciones
- Algebra VectorialDocumento14 páginasAlgebra VectorialAaron GonzalezAún no hay calificaciones
- Tema 3 - VectoresDocumento13 páginasTema 3 - VectoresJesus Miguel Paredes TrujilloAún no hay calificaciones
- Vectores 2020Documento34 páginasVectores 2020Fernando Dávalos Huallpa :DAún no hay calificaciones
- Vectores en El Espacio CSG1Documento37 páginasVectores en El Espacio CSG1Ivan MontañoAún no hay calificaciones
- Suma y Resta de Vectores UCE EstudioDocumento7 páginasSuma y Resta de Vectores UCE EstudioEmily LopezAún no hay calificaciones
- Magnitudes VectorialesDocumento16 páginasMagnitudes VectorialesCarla reyesAún no hay calificaciones
- Presentación N°2 Física y MecánicaDocumento22 páginasPresentación N°2 Física y Mecánicamaribel Espinoza fuentesAún no hay calificaciones
- Estatica 1.1Documento35 páginasEstatica 1.1Figueroa Cohn JuanAún no hay calificaciones
- 2.1 Vectores2Documento62 páginas2.1 Vectores2JB José BadilloAún no hay calificaciones
- Analisis Vectorial Estatico - EstaticaDocumento34 páginasAnalisis Vectorial Estatico - EstaticaJanira Julca RodriguezAún no hay calificaciones
- Que Es Un TensorDocumento3 páginasQue Es Un TensorLuis Rodrigo Yujra AlejoAún no hay calificaciones
- Introducción A Los Vectores 5° (Semana 4)Documento26 páginasIntroducción A Los Vectores 5° (Semana 4)Misael NakayoAún no hay calificaciones
- Vectores en El Plano 1 BguDocumento14 páginasVectores en El Plano 1 BguCarla Castillo M.Aún no hay calificaciones
- Guia de Laboratorio # 3Documento6 páginasGuia de Laboratorio # 3Denis GamezAún no hay calificaciones
- Proyecto de Christian Ojeda 1Documento14 páginasProyecto de Christian Ojeda 1Christian Vinicio Ojeda AraujoAún no hay calificaciones
- 02 Analisis Vectorial - FisicaDocumento7 páginas02 Analisis Vectorial - FisicaJeanpier Torres QuindeAún no hay calificaciones
- Transformación lineal directa: Aplicaciones prácticas y técnicas en visión por computadora.De EverandTransformación lineal directa: Aplicaciones prácticas y técnicas en visión por computadora.Aún no hay calificaciones
- Sitemas de PotenciaDocumento3 páginasSitemas de PotenciaHector VergaraAún no hay calificaciones
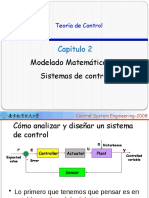
- 2016-1 Capítulo #2 Modelado Matemático de Sistemas de ControlDocumento77 páginas2016-1 Capítulo #2 Modelado Matemático de Sistemas de ControlHector Vergara100% (1)
- Antropología EducativaDocumento13 páginasAntropología EducativaHector VergaraAún no hay calificaciones
- Anillos ResonantesDocumento33 páginasAnillos ResonantesHector VergaraAún no hay calificaciones
- 2019ch4EquilibriodeCuerposRigidos ESTDocumento24 páginas2019ch4EquilibriodeCuerposRigidos ESTHector VergaraAún no hay calificaciones
- Procesamieno Digital de SeñalesDocumento5 páginasProcesamieno Digital de SeñalesHector VergaraAún no hay calificaciones
- Propiedades MecanicasDocumento10 páginasPropiedades MecanicasHector VergaraAún no hay calificaciones
- Geometalurgia en Intercade PDFDocumento5 páginasGeometalurgia en Intercade PDFpedropablo2915Aún no hay calificaciones
- Practica MicrofiltraciónDocumento18 páginasPractica MicrofiltraciónLuis Ivan Calderon Castillo100% (1)
- Fatiga de Metales PDFDocumento33 páginasFatiga de Metales PDFyohanni yepezAún no hay calificaciones
- Momento de Inercia Completo PDFDocumento189 páginasMomento de Inercia Completo PDFMarco BAún no hay calificaciones
- Mecánica de Las Rocas Aplicado Al Fracturamiento Hidráulico (Parte II)Documento14 páginasMecánica de Las Rocas Aplicado Al Fracturamiento Hidráulico (Parte II)Louse InnobaAún no hay calificaciones
- Formato de Tareas Extra - AnalogicasDocumento8 páginasFormato de Tareas Extra - AnalogicasJuan Gabriel Jimenez MerinoAún no hay calificaciones
- 4LA 4 3 Catalogo Lineas AereasDocumento2 páginas4LA 4 3 Catalogo Lineas Aereasluis100% (1)
- Practica 1 Presion AtmosfericaDocumento5 páginasPractica 1 Presion AtmosfericaLizeth ValdezAún no hay calificaciones
- Laboratorio 2 Estatica 2Documento11 páginasLaboratorio 2 Estatica 2Nilson JoaoAún no hay calificaciones
- EnlaceDocumento7 páginasEnlacechiihackerAún no hay calificaciones
- Seminario FisicaDocumento2 páginasSeminario FisicaAlbert DíazAún no hay calificaciones
- Centrales de GeneracionDocumento33 páginasCentrales de GeneracionThalia MontaluisaAún no hay calificaciones
- Práctica Cementación Acero 8620 PDFDocumento8 páginasPráctica Cementación Acero 8620 PDFJeroRdzBAún no hay calificaciones
- Cadena RespiratoriaDocumento27 páginasCadena RespiratoriaRicardo FonsecaAún no hay calificaciones
- Ejemplos Resueltos Feómenos Electricos, Segunda Parte (Circuitos Eléctricos)Documento7 páginasEjemplos Resueltos Feómenos Electricos, Segunda Parte (Circuitos Eléctricos)Paulina OcampoAún no hay calificaciones
- Trabajo en Frio, Tibio y CalienteDocumento13 páginasTrabajo en Frio, Tibio y CalienteholaAún no hay calificaciones
- Actividad de Aprendizaje 3. Modelos LinealesDocumento6 páginasActividad de Aprendizaje 3. Modelos Linealesangelica cruz perez100% (2)
- Laboratorio 03 2do Orden 2019 2Documento9 páginasLaboratorio 03 2do Orden 2019 2Erick Contreras QuispeAún no hay calificaciones
- Fabricación de Perfiles Metálicos y Ensamble de Una Estructura MetálicaDocumento6 páginasFabricación de Perfiles Metálicos y Ensamble de Una Estructura MetálicaLauraHernandezAún no hay calificaciones
- Tractor de Oruga D8T para MineríaDocumento17 páginasTractor de Oruga D8T para MineríaGonzalo Huaman De La MattaAún no hay calificaciones
- Sistema de Diagnostico OBD2Documento50 páginasSistema de Diagnostico OBD2metal69Aún no hay calificaciones
- Tabla de CargaDocumento20 páginasTabla de CargaSebastian AriasAún no hay calificaciones
- Informe Vigas LosasDocumento9 páginasInforme Vigas LosasKristian Saavedra (DJKristianS)Aún no hay calificaciones
- Cristalo GrafíADocumento8 páginasCristalo GrafíAKevin Perez NascimentoAún no hay calificaciones
- Motor C.C (Tipo Shunt)Documento14 páginasMotor C.C (Tipo Shunt)Reinaldo ChalbaudAún no hay calificaciones
- Graficas de CurvasDocumento11 páginasGraficas de CurvasDiego Cáceres BarriosAún no hay calificaciones
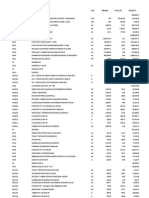
- Presupuesto de Una CarreteraDocumento4 páginasPresupuesto de Una CarreteraRonald Aquino QuispeAún no hay calificaciones
- Inf. ElectroquimicaDocumento11 páginasInf. ElectroquimicaJonathan Velásquez0% (1)
- Monografia 1 FisicaDocumento17 páginasMonografia 1 FisicaDanitza Trelles LopezAún no hay calificaciones