También podría gustarte
- Trazado de desarrollos en tuberías. FMEC0108De EverandTrazado de desarrollos en tuberías. FMEC0108Calificación: 3 de 5 estrellas3/5 (2)
- Matemáticas avanzadas aplicadas para ingenieríaDe EverandMatemáticas avanzadas aplicadas para ingenieríaAún no hay calificaciones
- Practicas Dinamica - 1639815-BrayanGuzmanDocumento41 páginasPracticas Dinamica - 1639815-BrayanGuzmanJohn SemonAún no hay calificaciones
- PoleasDocumento11 páginasPoleasMarcos SantiagoAún no hay calificaciones
- Valeria Yaressi de Leon Garcia P4Documento4 páginasValeria Yaressi de Leon Garcia P4Finanzas El Torito SinaloenseAún no hay calificaciones
- Diseño de Maquinas TrabajoDocumento7 páginasDiseño de Maquinas Trabajofredy apazaAún no hay calificaciones
- TMM 2022 2 L2Documento22 páginasTMM 2022 2 L2RICARDO ALEXANDER LAZARO SANCHEZAún no hay calificaciones
- REPORTE #1 CONCEPTOS BÁSICOS DE DINÁMICA - RemovedDocumento7 páginasREPORTE #1 CONCEPTOS BÁSICOS DE DINÁMICA - RemovedDiego CorpusAún no hay calificaciones
- Reporte No. 2Documento9 páginasReporte No. 2Elián ZamudioAún no hay calificaciones
- Erick Cavazos Rodriguez - 2074392 - Practica #1 - DinamicaDocumento8 páginasErick Cavazos Rodriguez - 2074392 - Practica #1 - DinamicaJennifer LunaAún no hay calificaciones
- # 14 Sintesis Analitica de Mecanismos 19211248Documento8 páginas# 14 Sintesis Analitica de Mecanismos 19211248JESUS ALEJANDRO LOPEZ GRACIAAún no hay calificaciones
- TMM Guía de Laboratorio 02Documento5 páginasTMM Guía de Laboratorio 02GILBERT YOEL DONATO ZAVALETAAún no hay calificaciones
- ActividadGrupal 2Documento45 páginasActividadGrupal 2Alexander TelloAún no hay calificaciones
- Lab 4 Mecanismos INFORMEDocumento12 páginasLab 4 Mecanismos INFORMEAnderson Raferti Loja LopezAún no hay calificaciones
- Unidad 3 - Cinematica de Maquinaria PDocumento13 páginasUnidad 3 - Cinematica de Maquinaria PJose Trinidad De La Cruz DominguezAún no hay calificaciones
- ACTIVIDAD No. 1 U5. Análisis y Síntesis de MecanismosDocumento11 páginasACTIVIDAD No. 1 U5. Análisis y Síntesis de MecanismosCarlos GuzmánAún no hay calificaciones
- Aplastadora de LatasDocumento8 páginasAplastadora de LatasAlejandro Maldonado0% (1)
- Cinematica de Mecanismos Analisis y Diseno HernandezDocumento368 páginasCinematica de Mecanismos Analisis y Diseno HernandezCesar Chu Acevedo89% (9)
- PalancasDocumento169 páginasPalancasRoss JCAún no hay calificaciones
- LibroDocumento363 páginasLibrojuan-carlos-oropeza-2079Aún no hay calificaciones
- Manual Prácticas MecanismosDocumento39 páginasManual Prácticas MecanismosHoracio Guadarrama CadenaAún no hay calificaciones
- U5 Presentación ElectrónicaDocumento12 páginasU5 Presentación Electrónicamaster nitroAún no hay calificaciones
- Mecanismo de 4 BarrasDocumento16 páginasMecanismo de 4 BarrasedutintaAún no hay calificaciones
- Programa Analítico MecanismosDocumento4 páginasPrograma Analítico MecanismosjoshhhiAún no hay calificaciones
- MÉCANISMOS Guia de TrabajoDocumento7 páginasMÉCANISMOS Guia de TrabajoDanny QuinatoaAún no hay calificaciones
- Tesis Edwin Laniado JacomeDocumento230 páginasTesis Edwin Laniado JacomeJesus Ticona TiconaAún no hay calificaciones
- Resumen MecanismosDocumento5 páginasResumen MecanismosYareli TroncoAún no hay calificaciones
- Sintesis de MecanismoDocumento27 páginasSintesis de MecanismoRamon BalanAún no hay calificaciones
- Informe6 Vega AngelDocumento11 páginasInforme6 Vega AngelCARLOS ANDRES JUMBO CASTILLOAún no hay calificaciones
- Metodo Elementos Finitos PDFDocumento230 páginasMetodo Elementos Finitos PDFOlmo Correcher GonzaloAún no hay calificaciones
- MecanismosDocumento234 páginasMecanismosJ Eduardo Jemo100% (2)
- Síntesis CinemáticaDocumento6 páginasSíntesis CinemáticaEduardo Michel LopezAún no hay calificaciones
- Fundamentos de MecanismosDocumento8 páginasFundamentos de MecanismosJesus Alejandro Fernandez DelgadoAún no hay calificaciones
- Inf Cuadrilátero ArticuladoDocumento14 páginasInf Cuadrilátero ArticuladoPablo Rodriguez Del BrioAún no hay calificaciones
- Mecanismos Unidad 2Documento12 páginasMecanismos Unidad 2Jose Salaya JuventahinoAún no hay calificaciones
- MecanismosDocumento7 páginasMecanismosmmarkCoAún no hay calificaciones
- Actividad 2 - Lab DinamicaDocumento10 páginasActividad 2 - Lab DinamicaAndy CastañedaAún no hay calificaciones
- P3 Laboratorio de Diseño de MecanismosDocumento5 páginasP3 Laboratorio de Diseño de MecanismosEckaterinaAún no hay calificaciones
- 4.marco Teorico: 1. Grados de Libertad (GDL) O MovilidadDocumento10 páginas4.marco Teorico: 1. Grados de Libertad (GDL) O MovilidadYeltsin Yanqui GamboaAún no hay calificaciones
- Practica-3 LabdinDocumento9 páginasPractica-3 LabdinAlberto GzHzAún no hay calificaciones
- Practica 1 Conceptos Basicos de DinamicaDocumento6 páginasPractica 1 Conceptos Basicos de DinamicaEmilio CalderonAún no hay calificaciones
- R2 LabDin B413Documento7 páginasR2 LabDin B413Trigo sanAún no hay calificaciones
- Practicas de DinamicaDocumento26 páginasPracticas de DinamicaJoel Ramírez50% (2)
- Laboratorio 4Documento10 páginasLaboratorio 4joneth1g.1mostaceroAún no hay calificaciones
- Portafolio Laboratorio de DinamicaDocumento36 páginasPortafolio Laboratorio de DinamicaPolo ElizaldeAún no hay calificaciones
- Mecatrónica: modelado, simulación y control de sistemas físicosDe EverandMecatrónica: modelado, simulación y control de sistemas físicosAún no hay calificaciones
- Principios de transferencia de cantidad de movimientoDe EverandPrincipios de transferencia de cantidad de movimientoAún no hay calificaciones
- Geometría Computacional: Explorando conocimientos geométricos para la visión por computadoraDe EverandGeometría Computacional: Explorando conocimientos geométricos para la visión por computadoraAún no hay calificaciones
- UF1253 - Diagnóstico de deformaciones estructuralesDe EverandUF1253 - Diagnóstico de deformaciones estructuralesAún no hay calificaciones
- Modelado tridimensional del flujo de aire en el cilindro de motores diésel de inyección directaDe EverandModelado tridimensional del flujo de aire en el cilindro de motores diésel de inyección directaAún no hay calificaciones
- Aplicación de la matemáticas a la realidad: Temas de ingenieríaDe EverandAplicación de la matemáticas a la realidad: Temas de ingenieríaCalificación: 5 de 5 estrellas5/5 (1)
- Álgebra abstracta aplicada en ingeniería: casos de aplicación en sistemas difusos tipo 1 y tipo 2De EverandÁlgebra abstracta aplicada en ingeniería: casos de aplicación en sistemas difusos tipo 1 y tipo 2Aún no hay calificaciones
- Introducción al análisis estadístico multivariado aplicado: Experiencia y casos en el Caribe colombianoDe EverandIntroducción al análisis estadístico multivariado aplicado: Experiencia y casos en el Caribe colombianoCalificación: 5 de 5 estrellas5/5 (2)
- Mecatrónica - sistemas de control electrónico en la ingeniería mecánica y eléctricaDe EverandMecatrónica - sistemas de control electrónico en la ingeniería mecánica y eléctricaCalificación: 5 de 5 estrellas5/5 (3)
- Análisis numérico en fenómenos de transporte. Casos de estudioDe EverandAnálisis numérico en fenómenos de transporte. Casos de estudioAún no hay calificaciones
- Modelamiento y simulación de sistemas con Simulink: Aplicaciones en ingeniería estructuralDe EverandModelamiento y simulación de sistemas con Simulink: Aplicaciones en ingeniería estructuralCalificación: 4.5 de 5 estrellas4.5/5 (4)
- Manual práctico de investigación de operaciones I. 4edDe EverandManual práctico de investigación de operaciones I. 4edCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoDe EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Control de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalDe EverandControl de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalCalificación: 5 de 5 estrellas5/5 (4)
- Sintesisdemecanismosplanos PDFDocumento26 páginasSintesisdemecanismosplanos PDFCarlos Cabanillas100% (1)
- FibonacciDocumento1 páginaFibonacciCarlos CabanillasAún no hay calificaciones
- FibonacciDocumento3 páginasFibonacciCarlos CabanillasAún no hay calificaciones
- Medio Ambiente CuentoDocumento2 páginasMedio Ambiente CuentoCarlos CabanillasAún no hay calificaciones
- El Hijo de La Lun1Documento2 páginasEl Hijo de La Lun1Carlos CabanillasAún no hay calificaciones
- A SteroidesDocumento10 páginasA SteroidesCarlos CabanillasAún no hay calificaciones
- El Juego y Su MetodologiaDocumento3 páginasEl Juego y Su MetodologiaLeyfzalley González Meléndez100% (1)
- El SombreadoDocumento2 páginasEl SombreadoSilvana CottiéAún no hay calificaciones
- Teoria CognositivaDocumento11 páginasTeoria CognositivapsicotianshiAún no hay calificaciones
- GuiaAA1 FundamentacionvfinDocumento6 páginasGuiaAA1 FundamentacionvfinOMAR ALEJANDRO MARIN LONDONOAún no hay calificaciones
- Cuadro Taller EstrategiasDocumento20 páginasCuadro Taller EstrategiasLuis Gilberto Osorio CasasAún no hay calificaciones
- Sanciones A Conductas ImprocedentesDocumento6 páginasSanciones A Conductas ImprocedentesDavid_1959Aún no hay calificaciones
- ParvularioDocumento1 páginaParvulariola_mayitoAún no hay calificaciones
- Plan Semestral de Ciencias Sociales VIDocumento4 páginasPlan Semestral de Ciencias Sociales VIEsmeralda Olmos AbregoAún no hay calificaciones
- Joan Mallart Didáctica 1Documento79 páginasJoan Mallart Didáctica 1Omar50% (4)
- Ómo Hacer Un Ensayo LiterarioDocumento3 páginasÓmo Hacer Un Ensayo LiterarioJHON JAIRO CONTRERAS CASTILLOAún no hay calificaciones
- Competencia Digital Docente: Creación de Contenidos Didácticos Multimedia Interactivos para El Aula Con Mac E IpadDocumento1 páginaCompetencia Digital Docente: Creación de Contenidos Didácticos Multimedia Interactivos para El Aula Con Mac E IpadJoseAún no hay calificaciones
- Acto Inicio de ClasesDocumento4 páginasActo Inicio de ClasessandraAún no hay calificaciones
- Metodologia 4Documento18 páginasMetodologia 4Raul Diaz MartinezAún no hay calificaciones
- Escuelas EmblemáticasDocumento3 páginasEscuelas EmblemáticasJonatan Martinez VazquezAún no hay calificaciones
- Escuela de Padres Mi Hijo InexaDocumento11 páginasEscuela de Padres Mi Hijo Inexa63515251Aún no hay calificaciones
- Taller 3 Un Caracol ViajeroDocumento1 páginaTaller 3 Un Caracol ViajeroDavid Esteban Quezada MieresAún no hay calificaciones
- Bibliografia DispraxiaDocumento14 páginasBibliografia Dispraxiaedurnexx30Aún no hay calificaciones
- Antologia Ala Didactica Del Idioma Del InglesDocumento18 páginasAntologia Ala Didactica Del Idioma Del Inglescecilia martinezAún no hay calificaciones
- La Utilizacion de Material Didactico en El Aula Ayuda Avanzar Con La EbiDocumento143 páginasLa Utilizacion de Material Didactico en El Aula Ayuda Avanzar Con La EbiAmerico XitumulAún no hay calificaciones
- 4 9 Organizacion de Los Recreos Entradas y Saldas Al CentroDocumento9 páginas4 9 Organizacion de Los Recreos Entradas y Saldas Al CentroRebeca Sofia Bellolio MaturanaAún no hay calificaciones
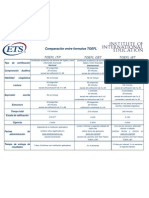
- Comparacion Formatos ToeflchDocumento1 páginaComparacion Formatos Toeflchpokie_co6251Aún no hay calificaciones
- Secuencia PAVÓN - Escuela de MúsicaDocumento12 páginasSecuencia PAVÓN - Escuela de Músicavalentinapavon16Aún no hay calificaciones
- Sesión de Aprendizaje Elaboramos Reseñas LiterariasDocumento2 páginasSesión de Aprendizaje Elaboramos Reseñas Literariashenrry67% (12)
- Planeacion 6o. B-V Semana 1Documento10 páginasPlaneacion 6o. B-V Semana 1Mimi Alejandra Pérez GaytánAún no hay calificaciones
- Un Mal Profesor Puede Arruinarte La Vida PDFDocumento7 páginasUn Mal Profesor Puede Arruinarte La Vida PDFMiguel Hilario NateraAún no hay calificaciones
- HGE - U6 - 4to Grado - Sesion 05Documento3 páginasHGE - U6 - 4to Grado - Sesion 05Juan ChavestaAún no hay calificaciones
- Soluciones Lengua5 SMDocumento31 páginasSoluciones Lengua5 SMMari Zadi NorimeAún no hay calificaciones
- Concentrado Evaluacion Fin de Curso 2019Documento5 páginasConcentrado Evaluacion Fin de Curso 201912djn5644kAún no hay calificaciones
- Glosario de Psicología EducativaDocumento9 páginasGlosario de Psicología EducativaJavierVS1988Aún no hay calificaciones