También podría gustarte
- Análisis y diseño de algoritmos: Un enfoque prácticoDe EverandAnálisis y diseño de algoritmos: Un enfoque prácticoAún no hay calificaciones
- Dinámica de estructuras: Sistemas de un grado de libertadDe EverandDinámica de estructuras: Sistemas de un grado de libertadCalificación: 4.5 de 5 estrellas4.5/5 (4)
- Modelamiento y simulación de sistemas con Simulink: Aplicaciones en ingeniería estructuralDe EverandModelamiento y simulación de sistemas con Simulink: Aplicaciones en ingeniería estructuralCalificación: 4.5 de 5 estrellas4.5/5 (4)
- UF1253 - Diagnóstico de deformaciones estructuralesDe EverandUF1253 - Diagnóstico de deformaciones estructuralesAún no hay calificaciones
- Diseño PublicitarioDocumento24 páginasDiseño PublicitarioCas Isac100% (3)
- 4R70W Gran Marquis PDFDocumento285 páginas4R70W Gran Marquis PDFRichard Medrano Almaraz67% (9)
- Análisis y diseño de piezas con Catia V5De EverandAnálisis y diseño de piezas con Catia V5Calificación: 5 de 5 estrellas5/5 (1)
- Modelado y simulación de redes. Aplicación de QoS con opnet modelerDe EverandModelado y simulación de redes. Aplicación de QoS con opnet modelerAún no hay calificaciones
- Introducción al análisis estadístico multivariado aplicado: Experiencia y casos en el Caribe colombianoDe EverandIntroducción al análisis estadístico multivariado aplicado: Experiencia y casos en el Caribe colombianoCalificación: 5 de 5 estrellas5/5 (2)
- Declaracion de Cambio Por Exportaciones de Bienes Formulario N 2 SENADocumento1 páginaDeclaracion de Cambio Por Exportaciones de Bienes Formulario N 2 SENAanderson castañoAún no hay calificaciones
- Mecatrónica: modelado, simulación y control de sistemas físicosDe EverandMecatrónica: modelado, simulación y control de sistemas físicosAún no hay calificaciones
- Unidad 5Documento17 páginasUnidad 5Leeo Guerrero95% (43)
- 5.7 MecanismosDocumento15 páginas5.7 MecanismosLuisdeGanteAún no hay calificaciones
- El problema de complementariedad No lineal: Teoría, aplicaciones y nuevos algoritmos para su soluciónDe EverandEl problema de complementariedad No lineal: Teoría, aplicaciones y nuevos algoritmos para su soluciónAún no hay calificaciones
- Síntesis de mecanismos: clasificación de problemas, generación de funciones y trayectoriasDocumento17 páginasSíntesis de mecanismos: clasificación de problemas, generación de funciones y trayectoriasJuana MoralesAún no hay calificaciones
- ActividadGrupal 2Documento45 páginasActividadGrupal 2Alexander TelloAún no hay calificaciones
- Principios de transferencia de cantidad de movimientoDe EverandPrincipios de transferencia de cantidad de movimientoAún no hay calificaciones
- 0.6 Solidworks MotionDocumento16 páginas0.6 Solidworks MotionRicardo Rodriguez TorresAún no hay calificaciones
- Geometric modeling in computer: Aided geometric designDe EverandGeometric modeling in computer: Aided geometric designAún no hay calificaciones
- Sintesis de MecanismosDocumento7 páginasSintesis de MecanismosViktor Hernandez0% (1)
- Introducción Al PROMODELDocumento36 páginasIntroducción Al PROMODELhectorsimula100% (3)
- Diseño de eslabonamientos para generar movimientosDocumento14 páginasDiseño de eslabonamientos para generar movimientosstalinAún no hay calificaciones
- Analisis y Sintesis de MecanismosDocumento14 páginasAnalisis y Sintesis de MecanismosLeonardo RomoAún no hay calificaciones
- Sintesis de MecanismosDocumento63 páginasSintesis de Mecanismosklopez472Aún no hay calificaciones
- Sintesis Grafica de EslabonamientosDocumento41 páginasSintesis Grafica de EslabonamientosCiro alexis Montejo monsalveAún no hay calificaciones
- Cinemática y Mecanismos - Conceptos básicosDocumento17 páginasCinemática y Mecanismos - Conceptos básicosValeria TrujilloAún no hay calificaciones
- 3 - Sintesis Gráfica de EslabonamientosDocumento47 páginas3 - Sintesis Gráfica de EslabonamientosJorge Argel PachecoAún no hay calificaciones
- PoleasDocumento11 páginasPoleasMarcos SantiagoAún no hay calificaciones
- Sistesis de MecanismosDocumento14 páginasSistesis de MecanismosCarlos CabanillasAún no hay calificaciones
- Laboratorio 4Documento10 páginasLaboratorio 4joneth1g.1mostaceroAún no hay calificaciones
- Guía de trabajo de mecanismos: análisis de posición y velocidadDocumento7 páginasGuía de trabajo de mecanismos: análisis de posición y velocidadDanny QuinatoaAún no hay calificaciones
- # 14 Sintesis Analitica de Mecanismos 19211248Documento8 páginas# 14 Sintesis Analitica de Mecanismos 19211248JESUS ALEJANDRO LOPEZ GRACIAAún no hay calificaciones
- 003 Sintesis Grafica de EslabonamientosDocumento38 páginas003 Sintesis Grafica de EslabonamientosLeidy Cabana MartinezAún no hay calificaciones
- Actividad 1 U 5Documento6 páginasActividad 1 U 5LUIS ALBERTO BERNAL VALENZUELAAún no hay calificaciones
- Introducción A La Síntesis de MecanismosDocumento2 páginasIntroducción A La Síntesis de MecanismosJhonn CarrierAún no hay calificaciones
- MecanismosDocumento234 páginasMecanismosJ Eduardo Jemo100% (2)
- Sintesis de MecanismosDocumento29 páginasSintesis de MecanismosFelipe Andrés Cuevas EchegoyenAún no hay calificaciones
- Práctica 1 Cinemática de Maquinaria ESPOLDocumento5 páginasPráctica 1 Cinemática de Maquinaria ESPOLKawah Kevin MaxAún no hay calificaciones
- U5 Presentación ElectrónicaDocumento12 páginasU5 Presentación Electrónicamaster nitroAún no hay calificaciones
- Trabajo Grupal Linea RectaDocumento11 páginasTrabajo Grupal Linea RectaStephannyAún no hay calificaciones
- Guía de eslabonamientos y síntesis mecánicaDocumento15 páginasGuía de eslabonamientos y síntesis mecánicaAlexValeAún no hay calificaciones
- 4.marco Teorico: 1. Grados de Libertad (GDL) O MovilidadDocumento10 páginas4.marco Teorico: 1. Grados de Libertad (GDL) O MovilidadYeltsin Yanqui GamboaAún no hay calificaciones
- ACTIVIDAD No. 1 U5. Análisis y Síntesis de MecanismosDocumento11 páginasACTIVIDAD No. 1 U5. Análisis y Síntesis de MecanismosCarlos GuzmánAún no hay calificaciones
- Unidad 5 Mecanismos - 5.1 y 5.2Documento3 páginasUnidad 5 Mecanismos - 5.1 y 5.2DanaAún no hay calificaciones
- Asignacion CuadraticaDocumento15 páginasAsignacion CuadraticaSergio Adrian Garcia Hernandez100% (2)
- Unidad 3 - Cinematica de Maquinaria PDocumento13 páginasUnidad 3 - Cinematica de Maquinaria PJose Trinidad De La Cruz DominguezAún no hay calificaciones
- Diseño DE MAQUINASDocumento67 páginasDiseño DE MAQUINASluiscarlosmarquez100% (1)
- Síntesis CinemáticaDocumento6 páginasSíntesis CinemáticaEduardo Michel LopezAún no hay calificaciones
- Proyecto Mecanismos Cedillo Sandoval Ricardo HiramDocumento36 páginasProyecto Mecanismos Cedillo Sandoval Ricardo HiramRicardo SandovalAún no hay calificaciones
- Sintesis de MecanismoDocumento27 páginasSintesis de MecanismoRamon BalanAún no hay calificaciones
- Análisis MecanismoDocumento8 páginasAnálisis MecanismoluisaliasAún no hay calificaciones
- Diseño mecanismo leva-seguidor movimiento rodilloDocumento16 páginasDiseño mecanismo leva-seguidor movimiento rodillofelipecondo92Aún no hay calificaciones
- Síntesis de MecanismosDocumento9 páginasSíntesis de MecanismosHamlet Esau ToledoAún no hay calificaciones
- Diseño y construcción de robot RRRPDocumento19 páginasDiseño y construcción de robot RRRPDavid AlvarezAún no hay calificaciones
- Mecanismo de 4 BarrasDocumento16 páginasMecanismo de 4 BarrasedutintaAún no hay calificaciones
- Dinámica Mecanismo Manivela CorrederaDocumento51 páginasDinámica Mecanismo Manivela CorrederaBrandon GarzonAún no hay calificaciones
- Informe de MecanismosDocumento26 páginasInforme de MecanismosAnderson RamirezAún no hay calificaciones
- Robótica: enfoque computacional: Transformaciones espaciales, planificación de trayectorias, cinemática, dinámica y control de robotsDe EverandRobótica: enfoque computacional: Transformaciones espaciales, planificación de trayectorias, cinemática, dinámica y control de robotsAún no hay calificaciones
- Álgebra abstracta aplicada en ingeniería: casos de aplicación en sistemas difusos tipo 1 y tipo 2De EverandÁlgebra abstracta aplicada en ingeniería: casos de aplicación en sistemas difusos tipo 1 y tipo 2Aún no hay calificaciones
- MantenimientoDocumento27 páginasMantenimientofredy apazaAún no hay calificaciones
- MantenimientoDocumento27 páginasMantenimientofredy apazaAún no hay calificaciones
- Ejercicio Con Macros - Certificado.Documento1 páginaEjercicio Con Macros - Certificado.fredy apazaAún no hay calificaciones
- Cuadro de Vias para LuminariasDocumento2 páginasCuadro de Vias para Luminariasfredy apazaAún no hay calificaciones
- Recursos EnergéticosDocumento4 páginasRecursos EnergéticosJuan Pablo Muñoz Erpel0% (1)
- DEPORTEJJJJJJJJJJJJJJJJJJJJJJJJJJDocumento9 páginasDEPORTEJJJJJJJJJJJJJJJJJJJJJJJJJJfredy apazaAún no hay calificaciones
- Centrales IDocumento8 páginasCentrales Ifredy apazaAún no hay calificaciones
- Energias AlternativasDocumento6 páginasEnergias Alternativasfredy apazaAún no hay calificaciones
- Formatos para Diferentes Tramites 1Documento9 páginasFormatos para Diferentes Tramites 1jhonhm100% (1)
- 3 Practica Con Funciones Matematicas MatricesDocumento12 páginas3 Practica Con Funciones Matematicas Matricesfredy apazaAún no hay calificaciones
- FEMENINADocumento5 páginasFEMENINAfredy apazaAún no hay calificaciones
- Combustión en GasolinaDocumento8 páginasCombustión en Gasolinafredy apazaAún no hay calificaciones
- Comet A Ssss SssssssssDocumento5 páginasComet A Ssss Sssssssssfredy apazaAún no hay calificaciones
- Cuales Son Las Principales Fuentes de La Cultura PeruanaDocumento4 páginasCuales Son Las Principales Fuentes de La Cultura Peruanafredy apazaAún no hay calificaciones
- Imagenes SssDocumento3 páginasImagenes Sssfredy apazaAún no hay calificaciones
- PiscinaDocumento10 páginasPiscinafredy apazaAún no hay calificaciones
- El AvarooooooooooooooooooooooooooooooooooooooooDocumento13 páginasEl Avaroooooooooooooooooooooooooooooooooooooooofredy apazaAún no hay calificaciones
- Comet A Ssss SssssssssDocumento5 páginasComet A Ssss Sssssssssfredy apazaAún no hay calificaciones
- Lucimar R RRRRRRRRDocumento8 páginasLucimar R RRRRRRRRfredy apazaAún no hay calificaciones
- Cuales Son Las Principales Fuentes de La Cultura PeruanaDocumento5 páginasCuales Son Las Principales Fuentes de La Cultura Peruanafredy apaza0% (2)
- AlcoholismDocumento15 páginasAlcoholismfredy apazaAún no hay calificaciones
- Enciclicas SocialesDocumento7 páginasEnciclicas Socialesfredy apazaAún no hay calificaciones
- 1Documento25 páginas1fredy apazaAún no hay calificaciones
- Comet A Ssss SssssssssDocumento5 páginasComet A Ssss Sssssssssfredy apazaAún no hay calificaciones
- Scanner Y Codigo de Falla DTC: Fuel Injection IIDocumento3 páginasScanner Y Codigo de Falla DTC: Fuel Injection IIBrandon Sol VazquezAún no hay calificaciones
- Aplicaciones A La Vida CotidianaDocumento4 páginasAplicaciones A La Vida Cotidianajltorcas100% (1)
- Tarea 3 de Psicologia EducativaDocumento4 páginasTarea 3 de Psicologia EducativaclaritzaAún no hay calificaciones
- Falla CochabambaDocumento6 páginasFalla CochabambahugogalindoAún no hay calificaciones
- Vectores y Sus TransformaciónDocumento11 páginasVectores y Sus TransformaciónLuis IlbayAún no hay calificaciones
- ANÁLISIS ManovaDocumento4 páginasANÁLISIS ManovaKaren ContrerasAún no hay calificaciones
- Naval de Nasa PDFDocumento133 páginasNaval de Nasa PDFdaniilAún no hay calificaciones
- Preescritura nivel prekinderDocumento49 páginasPreescritura nivel prekinderjessica vilches gonzalezAún no hay calificaciones
- Sueños y amigos: cuento sobre la amistadDocumento4 páginasSueños y amigos: cuento sobre la amistaddeicy carvajalAún no hay calificaciones
- SRAMDocumento12 páginasSRAMque buenoAún no hay calificaciones
- Qué es un PIP en ForexDocumento3 páginasQué es un PIP en ForexRevolución model fit WcamAún no hay calificaciones
- Instalación de zócalos de vinílico flexible en hospitalDocumento2 páginasInstalación de zócalos de vinílico flexible en hospitaldeyvisAún no hay calificaciones
- Hardware y SofwareDocumento10 páginasHardware y SofwareDubier MarinAún no hay calificaciones
- Formulas Enterales y MasDocumento14 páginasFormulas Enterales y MasTessy Cueva QuevedoAún no hay calificaciones
- Origen de La Constitucion de VenezuelaDocumento15 páginasOrigen de La Constitucion de VenezuelaVinicio AndradeAún no hay calificaciones
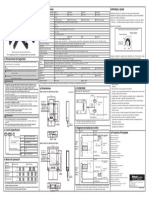
- Autonics Bup Esp ManualDocumento1 páginaAutonics Bup Esp ManualfchumpitazAún no hay calificaciones
- Fica de Inmuebles de Conservacion HistoricaDocumento5 páginasFica de Inmuebles de Conservacion HistoricaEmanuel GascaAún no hay calificaciones
- HorarioClasesMixcoCComDocumento1 páginaHorarioClasesMixcoCComBrenda De LeonAún no hay calificaciones
- Taller de Matematica Con FosforosDocumento31 páginasTaller de Matematica Con FosforosJavier100% (1)
- Resolución Administrativa N°202-2013Documento15 páginasResolución Administrativa N°202-2013oitedrstAún no hay calificaciones
- Visita A CemexDocumento10 páginasVisita A CemexOscar Kase MartinezAún no hay calificaciones
- Propuesta de Protocolo Nacional de Monitoreo de Calidad Del Aire 04.12.2...Documento76 páginasPropuesta de Protocolo Nacional de Monitoreo de Calidad Del Aire 04.12.2...CASTILLO LIÑAN TANIA LESLIEAún no hay calificaciones
- Parasitos IntestinalesDocumento9 páginasParasitos Intestinalesmorenorossi20039509Aún no hay calificaciones
- 1201-18 - Construcción e Instalación de Pisos de Concreto Pretensado en Puente Peatonal Prototipo para BogotáDocumento10 páginas1201-18 - Construcción e Instalación de Pisos de Concreto Pretensado en Puente Peatonal Prototipo para BogotáEdwín Rodríguez100% (1)
- Eucocell 1000Documento2 páginasEucocell 1000Samuel Laura HuancaAún no hay calificaciones
- Biografía Del Río SeturmaDocumento12 páginasBiografía Del Río SeturmaJorge Luis Gonzalez BermudezAún no hay calificaciones