También podría gustarte
- L Matthes Wolf E-Vidriados Cerámicos-OCRDocumento128 páginasL Matthes Wolf E-Vidriados Cerámicos-OCRDiana100% (2)
- Mecanismo de 4 BarrasDocumento9 páginasMecanismo de 4 BarrasAlbert GuerreroAún no hay calificaciones
- TMM-02 Mecanismos Articulados PlanosDocumento24 páginasTMM-02 Mecanismos Articulados PlanosNestorRinconMalloAún no hay calificaciones
- Eslabonamientos 4 BarrasDocumento63 páginasEslabonamientos 4 BarrascreynamAún no hay calificaciones
- Cinemática de MecanismosDocumento6 páginasCinemática de MecanismosAstrid MeléndezAún no hay calificaciones
- TMM-02 Mecanismos Articulados Planos v2-1Documento25 páginasTMM-02 Mecanismos Articulados Planos v2-1gonzaloAún no hay calificaciones
- Geometria Descriptiva PDFDocumento170 páginasGeometria Descriptiva PDFReilly Espinoza Mogollón100% (4)
- CuestionarioDocumento23 páginasCuestionarioAracelly Lidia Lima Ticona100% (1)
- Lec 06042020Documento22 páginasLec 06042020Aracelly Lidia Lima TiconaAún no hay calificaciones
- Jadl 3521110510 CTDocumento28 páginasJadl 3521110510 CT3521110510Aún no hay calificaciones
- Tema2 GeometríaDocumento11 páginasTema2 Geometríaanon_501825149Aún no hay calificaciones
- Mecanismos de Eslabones ArticuladosDocumento25 páginasMecanismos de Eslabones ArticuladosMaxi I. Céspedes GonzalesAún no hay calificaciones
- Practicas DinamicaDocumento80 páginasPracticas DinamicaCesar CaReAún no hay calificaciones
- Mecanismos de Eslabones ArticuladosDocumento16 páginasMecanismos de Eslabones ArticuladosMarisabel LiscanoAún no hay calificaciones
- Mecanismos. Grado de LibertadDocumento13 páginasMecanismos. Grado de Libertadflores floresAún no hay calificaciones
- Teoría de Mecanismos: Práctica 7 Hoja: 1/24Documento24 páginasTeoría de Mecanismos: Práctica 7 Hoja: 1/24Bryan RiveraAún no hay calificaciones
- Introducción A MecanismosDocumento42 páginasIntroducción A MecanismosDaniel DiazAún no hay calificaciones
- Ley de Grashof PDFDocumento2 páginasLey de Grashof PDFPABLO DIAZ ENRIQUEZAún no hay calificaciones
- Mecanismos Terminologia y CaracteristicasDocumento45 páginasMecanismos Terminologia y CaracteristicasEdgardo Atoche SánchezAún no hay calificaciones
- Guia Tecnica de Mecanismo de Cuatro BarrasDocumento9 páginasGuia Tecnica de Mecanismo de Cuatro BarrasCarlos100% (1)
- Clase Mecanismos de 4 Barras - 1Documento24 páginasClase Mecanismos de 4 Barras - 1pipe spAún no hay calificaciones
- TAREA GRUPAL ESTATICA II ParcialDocumento40 páginasTAREA GRUPAL ESTATICA II ParcialGuadalupe GuevaraAún no hay calificaciones
- Lab 2Documento28 páginasLab 2Kevin EsquivelAún no hay calificaciones
- Descripción y Ejemplos de Mecanismos PDFDocumento13 páginasDescripción y Ejemplos de Mecanismos PDFJulioCarlosSantos100% (1)
- El Cuatro BarrasDocumento18 páginasEl Cuatro BarrasJesús Salvador PorrasAún no hay calificaciones
- Mecanismo de Cuatro Barras ArticuladasDocumento33 páginasMecanismo de Cuatro Barras ArticuladasAlan Rosas AranaAún no hay calificaciones
- Libro de Texto de MecanismosDocumento166 páginasLibro de Texto de MecanismosRomero Luis Gervacio100% (1)
- Reactivos CardozoDocumento41 páginasReactivos CardozoMiguel Angel CasiqueAún no hay calificaciones
- Eslabonamiento de Cuatro BarrasDocumento17 páginasEslabonamiento de Cuatro BarrasAndres PeñalozaAún no hay calificaciones
- TP1 2022Documento22 páginasTP1 2022Jose BenitezAún no hay calificaciones
- Mecánica y MecanismosDocumento44 páginasMecánica y MecanismosCatalina HerreraAún no hay calificaciones
- Mecanismos de 4 BarrasDocumento18 páginasMecanismos de 4 BarrasElton GuadarramaAún no hay calificaciones
- Grados de Libertad e Inversion CinemáticaDocumento30 páginasGrados de Libertad e Inversion CinemáticaDiego Niikii Sixx100% (1)
- Simbologia TMMDocumento9 páginasSimbologia TMMAnonymous ZMwWk2vAún no hay calificaciones
- Proyecto Medio Ciclo Maqueta Elementos de MaterialesDocumento15 páginasProyecto Medio Ciclo Maqueta Elementos de MaterialesMICHEL PARRALESAún no hay calificaciones
- Mecanismo de Corredera PDFDocumento40 páginasMecanismo de Corredera PDFYajis Eliz Chikit TkmAún no hay calificaciones
- 1 Terminologia y Conceptos Basicos 4 BarrasDocumento15 páginas1 Terminologia y Conceptos Basicos 4 BarrasKatty SaucedaAún no hay calificaciones
- Cinematica de LevasDocumento6 páginasCinematica de LevasJ Rodrigo Castro HAún no hay calificaciones
- Mecanismos en SolidworkDocumento3 páginasMecanismos en SolidworkIván D. ArdilaAún no hay calificaciones
- Análisis Cinemático Directo Del Robot RV-2AJ de Mitsubishi Utilizando Teoría de ScrewsDocumento6 páginasAnálisis Cinemático Directo Del Robot RV-2AJ de Mitsubishi Utilizando Teoría de ScrewsNaimersoft SolucionesAún no hay calificaciones
- Teoria de MaquinasDocumento18 páginasTeoria de Maquinasgogetinho cr7Aún no hay calificaciones
- Mecanismos-Unidad 1Documento13 páginasMecanismos-Unidad 1Oyuki MaquedaAún no hay calificaciones
- Mecanismos Unidad 1Documento13 páginasMecanismos Unidad 1juliogomez008Aún no hay calificaciones
- Tabulación de Centros InstantaneosDocumento50 páginasTabulación de Centros InstantaneosmijachuAún no hay calificaciones
- Unidad IDocumento13 páginasUnidad Ifelipemontesinos311Aún no hay calificaciones
- Scri 7Documento10 páginasScri 7July VergaraAún no hay calificaciones
- Practica #1 Conceptos Básicos de Dinámica - 2077517Documento6 páginasPractica #1 Conceptos Básicos de Dinámica - 2077517MooncrystalAún no hay calificaciones
- Clase 3 Grados de Libertad - Ley de GrashofDocumento25 páginasClase 3 Grados de Libertad - Ley de GrashofMat angelAún no hay calificaciones
- 2 - Parte I - Introduccion A Los Mecanismos - Introduccion - Movilidad - Ley de Grashof - CIRDocumento25 páginas2 - Parte I - Introduccion A Los Mecanismos - Introduccion - Movilidad - Ley de Grashof - CIRJose ramiro ZotarezAún no hay calificaciones
- CINEmatica - MECANISMO - TareaDocumento35 páginasCINEmatica - MECANISMO - TareaNoyo OcbAún no hay calificaciones
- Mecanismos de Cuatro BarrasDocumento6 páginasMecanismos de Cuatro BarrasM D Ruiz GalvisAún no hay calificaciones
- Brazo Robotico de 5 GLDDocumento15 páginasBrazo Robotico de 5 GLDWALTER MAX MONTAÑO CAMACHOAún no hay calificaciones
- Mecanismos de 4 BarrasDocumento7 páginasMecanismos de 4 BarrasElii TroncosoAún no hay calificaciones
- Mecanismos Cuestionario 1 Concho UpiitaDocumento7 páginasMecanismos Cuestionario 1 Concho Upiitabenitop0750% (2)
- Mecanismo 4 Barras ReporteDocumento13 páginasMecanismo 4 Barras ReporteMimi Flores Salazar100% (1)
- Ley de GrashofDocumento4 páginasLey de GrashofDanny CristanchoAún no hay calificaciones
- Principales Mecanismos PlanosDocumento4 páginasPrincipales Mecanismos Planosdanilot2680% (5)
- Libro de Texto de MecanismosDocumento179 páginasLibro de Texto de MecanismosAlguien Por AkiAún no hay calificaciones
- Principios de transferencia de cantidad de movimientoDe EverandPrincipios de transferencia de cantidad de movimientoAún no hay calificaciones
- Ec de Energía PDFDocumento3 páginasEc de Energía PDFJuan Andres Torres CaicedoAún no hay calificaciones
- EjercicioDocumento5 páginasEjercicioCristhianAún no hay calificaciones
- Ec de EnergíaDocumento3 páginasEc de EnergíaJuan Andres Torres Caicedo100% (1)
- Informe FresadoraDocumento6 páginasInforme FresadoraJuan Andres Torres CaicedoAún no hay calificaciones
- Póster - Adrián Barranco y Diana BayonaDocumento1 páginaPóster - Adrián Barranco y Diana BayonaJavier HurtadoAún no hay calificaciones
- Expo Final ResisDocumento27 páginasExpo Final Resismarcos abalAún no hay calificaciones
- Proyecto Taller Investigacion IIDocumento28 páginasProyecto Taller Investigacion IIPaisa Rodriguez RojasAún no hay calificaciones
- (MRUA) EjemploDocumento14 páginas(MRUA) EjemploCristian MolanoAún no hay calificaciones
- Laboratorio5 SIS2210 EncapsulamientoDocumento4 páginasLaboratorio5 SIS2210 EncapsulamientoJoselin RamirezAún no hay calificaciones
- Norma INEN 0 495 - 1980Documento7 páginasNorma INEN 0 495 - 1980sisapakariAún no hay calificaciones
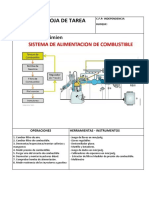
- FICHA de AveríasDocumento4 páginasFICHA de AveríasWalter Alexander Saca SacaAún no hay calificaciones
- Explicacion de ExperimentosDocumento2 páginasExplicacion de ExperimentosDairis SebastianAún no hay calificaciones
- Requerimento de SeguridadDocumento5 páginasRequerimento de SeguridadDirettore NuñonccaAún no hay calificaciones
- DASH 125 (Dec, 2018)Documento88 páginasDASH 125 (Dec, 2018)Michaell KingsAún no hay calificaciones
- Proceso de Obtencion de EquiposDocumento22 páginasProceso de Obtencion de EquiposJim HalAún no hay calificaciones
- 2017 1 ImDocumento267 páginas2017 1 ImMarcos Carrero100% (1)
- Alquinos YalquenosDocumento5 páginasAlquinos YalquenosAlexis CruzAún no hay calificaciones
- Ley de Hooke Informe 1Documento13 páginasLey de Hooke Informe 1Joshua CrederAún no hay calificaciones
- Programación Modular: Semana 11Documento1 páginaProgramación Modular: Semana 11api-451563984Aún no hay calificaciones
- Andamios y Escaleras ExamenDocumento3 páginasAndamios y Escaleras ExamenDaniel AlejandroAún no hay calificaciones
- El Acero EstructuralDocumento6 páginasEl Acero EstructuralJose David RodriguezAún no hay calificaciones
- Administracion de Sistemas Solaris 10Documento9 páginasAdministracion de Sistemas Solaris 10David SmithAún no hay calificaciones
- Examen Sustitutorio Ing. Anti-2021Documento1 páginaExamen Sustitutorio Ing. Anti-2021KenyoAún no hay calificaciones
- Well Testing Manual FinalDocumento151 páginasWell Testing Manual Finaloctavio montes lara100% (1)
- Hoja de Tarea en BlancoDocumento7 páginasHoja de Tarea en BlancoManu BGAún no hay calificaciones
- Test IhmDocumento17 páginasTest Ihmfredy_393Aún no hay calificaciones
- PreguntasDocumento4 páginasPreguntasYordy Sánchez0% (1)
- Cómo Deshágase de HTMLDocumento7 páginasCómo Deshágase de HTMLLisandro VilhAún no hay calificaciones
- Primer Taller TermoDocumento10 páginasPrimer Taller Termobookgalindo0404Aún no hay calificaciones
- Piezas de Directriz Recta Sometidas A Compresión. PilaresDocumento26 páginasPiezas de Directriz Recta Sometidas A Compresión. PilaresJoséCevallosAún no hay calificaciones
- La MaderaDocumento6 páginasLa Maderabrandon canAún no hay calificaciones
- Dilema TranspiracDocumento23 páginasDilema TranspiracVICTOR HUGO ENRIQUEZ CHAVEZAún no hay calificaciones
- INFORME DE TasacionDocumento9 páginasINFORME DE TasacionGabriela GaLrchAún no hay calificaciones