Transformada de Laplace en sistemas de control
automtico
TRANSFORMADA DE LAPLACE
La Transformada de Laplace es una tcnica Matemtica que forma parte de ciertas
transformadas integrales como la transformada de Fourier, la transformada de Hilbert, y la
transformada de Mellin entre otras. Estas transformadas estn definidas por medio de una
integral impropia y cambian una funcin en una variable de entrada en otra funcin en
otra variable. La transformada de Laplace puede ser usada para resolver Ecuaciones
Diferenciales Lineales y Ecuaciones Integrales. Aunque se pueden resolver algn tipo de
ED con coeficientes variables, en general se aplica a problemas con coeficientes
constantes. Un requisito adicional es el conocimiento de las condiciones iniciales a la
misma ED. Su mayor ventaja sale a relucir cuando la funcin en la variable independiente
que aparece en la ED es una funcin seccionada.
Cuando se resuelven ED usando la tcnica de la transformada, se cambia una ecuacin
diferencial en un problema algebraico. La metodologa consiste en aplicar la transformada
a la ED y posteriormente usar las propiedades de la transformada. El problema de ahora
consiste en encontrar una funcin en la variable independiente tenga una cierta expresin
como transformada.
Definicin de la Transformada
Sea f una funcin definida para
, la transformada de Laplace de f(t) se define
como
cuando tal integral converge
Notas
1. La letra s representa una nueva variable, que para el proceso de integracion
se considera constante
2. La transformada de Laplace convierte una funcion en t en una funcion en la
variable s
3. Condiciones para la existencia de la transformada de una funcin:
De orden exponencial
Continua a trozos
En ingeniera es usual describir los sistemas lineales mediante sus funciones de
transferencia en vez de con sus ecuaciones diferenciales de la forma. Por ejemplo el
siguiente sistema de control mediante retroalimentacin, dado por el siguiente diagrama
En este sistema buscamos obtener la
solucin transformada Y(z)
mediante
Inicialmente
el
siguiente
proceso.
X(z) a partir del sistema dado por la
obtenemos
funcin de transferencia
F(z). La funcin X(z) se transforma en el sistema dado por G(z) obtenindose S(z). Finalmente E(z) = Y(z) S(z), que a su vez vuelve a ser utilizada para obtener una nueva
X (z) mediante el proceso dado por la funcin de transferencia F(z). Buscamos la funcin
de transferencia
�Para ello utilizamos que
Como
de donde
A partir de esta funcin de transferencia puede la estabilidad del sistema de control por
retroalimentacin planteado calculando los polos de T(z).
Por ejemplo, supongamos que
Es inmediato ver
que
y resolviendo la ecuacin
obtenemos como posibles races
, por lo que el sistema ser inestable. Adems,
podemos expresar la ecuacin diferencial lineal que define el sistema teniendo en cuenta
que
de donde
y definiendo
y sabiendo como se construye la funcin de
transferencia, tenemos que el sistema vendr dado por las ecuaciones
Para finalizar, podemos comprobar el carcter inestable del sistema de retroalimentacin
del ejemplo anterior considerando la funcin rampa
�cuya grfica es
Entonces su Transformada de Laplace es
de donde la Transformada de Laplace de x viene dada por
Obtenemos su Transformada inversa
donde
de la funcin x en en intervalo [1, 20] es
�lo cual ejemplifica la inestabilidad de este sistema concreto.
Funcin de transferencia en los sistemas de control
Su estudio se enfoca dos teoras: la clsica y la moderna.
Teora clsica:
Es la ms sencilla porque en ella no interesa conocer en detalle lo que sucede dentro del
sistema solo interesa la relacin entrada-salida del sistema.
teora moderna:
Analiza los sistemas automticos desde el punto de vista interno, si interesa conocer lo
que sucede dentro del sistema.
Por medio de la teora clsica se puede conocer de forma sencilla:
- Cmo va a comportarse el sistema en cada situacin: segn la
entrada que se produzca en el sistema, sabremos cul ser la
respuesta salida.
- La estabilidad del mismo: (saber si la respuesta del sistema se
mantendr siempre dentro de unos lmites determinados, o llegar
en algn momento a ser inestable)
Concepto:
�La funcin de transferencia de un sistema de control se define como el
cociente entre las transformadas de Laplace de las seales de salida y de
entrada.
Polos y ceros de la funcin de transferencia:
-Los ceros son las races que toma el numerador al igualarse a cero
-
Los polos son las races que toma el denominador al igualarse a cero
Estos valores representa la regin frontera a la que no debe llegar ya sea la
respuesta del sistema, ya que de lo contrario llegar a la regin nula o se ir al
infinito.
Las races de la ecuacin caracterstica, las cuales son los polos de la funcin de
transferencia, deben ser reales o deben ocurrir como pares de complejos
conjugados. En adicin, las partes reales de todos los polos deben ser negativas
para que el sistema sea estable.
Un sistema es estable si todos su polos se ubican en el lado izquierdo del plano
S.
Operaciones con diagramas de bloques:
- Los diagramas de bloques se pueden obtener a partir de las funciones de
transferencia. Existen mtodos para reducir los diagramas ya que son
complicados:
Bloques en serie: La funcin de transferencia global para un sistema compuesto
por n bloques en serie, es igual al producto de las funciones de transferencia
aisladas.
�Sustituyendo en (2) el valor de R1(S) dado en (1) :
R2(S)= R(S).G1(S).G2(S), y repitiendo hasta la ecuacin (n) resulta:
C(S)= R(S).G1(S).G2(S). .Gn(S). Entonces resulta para la funcin de
transferencia global:
G(S) = C(S) / R(S) = G1(S).G2(S). .. . Gn(S)
Bloques en paralelo: La funcin de transferencia global para un sistema compuesto por
n
bloques en paralelo, es igual a la suma de las funciones de transferencia
aisladas.
�G(S) = C(S) / R(S) = G1(S) + G2(S) + ..+ Gn(S)
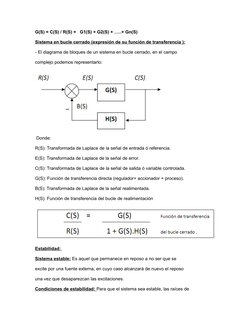
Sistema en bucle cerrado (expresin de su funcin de transferencia ):
- El diagrama de bloques de un sistema en bucle cerrado, en el campo
complejo podemos representarlo:
Donde:
R(S): Transformada de Laplace de la seal de entrada referencia.
E(S): Transformada de Laplace de la seal de error.
C(S): Transformada de Laplace de la seal de salida variable controlada.
G(S): Funcin de transferencia directa (regulador+ accionador + proceso).
B(S): Transformada de Laplace de la seal realimentada.
H(S): Funcin de transferencia del bucle de realimentacin
Estabilidad:
Sistema estable: Es aquel que permanece en reposo a no ser que se
excite por una fuente externa, en cuyo caso alcanzar de nuevo el reposo
una vez que desaparezcan las excitaciones.
Condiciones de estabilidad: Para que el sistema sea estable, las races de
�su ecuacin caracterstica (sus polos) deben estar situadas en la parte
negativa del plano complejo de Laplace.
Aplicaciones actuales del control en Ingeniera Aeronutica
Grandes estructuras
espaciales. Es frecuente
escuchar que el despliegue
de una antena o telescopio en
el espacio ha ocasionado
algunos problemas tcnicos,
algunos de ellos sumamente
costosos o incluso que han
inutilizado completamente la
estructura. Estos despliegues
y acoplamientos de
componentes deben basarse
en el control.
Control de la combustin. Se trata de un tema relevante en la industria
aeronutica y aeroespacial en las que se hace imprescindible controlar las
inestabilidades en la combustion que, normalmente, viene acompaada de
perturbaciones acsticas considerables. En el pasado se ha realizado el nfasis en
los aspectos del diseo, modificando la geometra del sistema para interferir la
interaccin, combustin-acstica o incorporando elementos disipativos. El control
activo de la combustin mediante mecanismos trmicos o acsticos, es un tema
en el que casi todo est por explorar
Control de Fluidos. Se trata de un problema con mucha importancia en
aeronutica puesto que la dinmica estructural del
avin (en sus alas, por ejemplo) est acoplada
con el flujo del aire en su entorno. Aunque en los
aviones convencionales se puede en gran medida
ignorar este acoplamiento, es probable que los
aviones del futuro tengan que incorporar
�mecanismos de control para evitar la aparicin de turbulencias en torno a las alas.
Desde un punto de vista matemtico casi todo est por hacer, tanto en lo que
respecta a la modelizacin, al control y a los aspectos computacionales.
LOS PACS
Los ingenieros de grandes compaas con la tarea de resolver los problemas de bajo
rendimiento computacional y aumentar las capacidades bsicas de los PLCs fueron los
que consideraron las PCs para control industrial para obtener la flexibilidad ofrecida por
software y el hardware de alto nivel. Sin embargo, utilizar las PCs para control industrial
en aquella poca tambin significa lidiar con debilidades inherentes como estabilidad,
confiabilidad, y herramientas de programacin no familiares.
El paso evolutivo obvio en estas herramientas fue el desarrollo de productos que ofrecen
la ventaja en ambas plataformas. Compaas como Rockwell, Siemens, GE Fanuc, y
Beckhoff vieron la necesidad de estos dispositivos y hoy da ofrecen plataformas
completas basndose en este concepto. Los nuevos controladores resultantes, diseados
para lograr aplicaciones ms especializadas, combinan lo mejor de las caractersticas
PLC con lo mejor de las caractersticas de las PCs. El analista industrial ARC nombr a
estos dispositivos controladores de automatizacin programable, o PACs.
QU ES UN PAC?
Un PAC (Programmable Automation Controller) es una tecnologa industrial orientada al
control automatizado avanzado, al diseo de equipos para laboratorios y a la medicin de
magnitudes anlogas. El PAC se refiere al conjunto formado por un controlador (una CPU
tpicamente), mdulos de entradas y salidas, y uno o mltiples buses de datos que lo
interconectan
todo.
Este controlador combina eficientemente la fiabilidad de control de un autmata o PLC
junto a la flexibilidad de monitorizacin, clculo y desempeo de un computador
industrial.
Los PACs pueden utilizarse en el mbito investigador y de laboratorios, pero es sobre todo
en el industrial, para control de mquinas y procesos, donde ms se utiliza. A destacar los
siguientes: mltiples lazos cerrados de control independientes, lazos de control robusto,
adquisicin de datos de precisin, anlisis matemtico y memoria profunda,
monitorizacin remota, visin artificial, control de movimiento y robtica, seguridad
controlada, administracin de recursos ARP o SAP, entre otros.
�Los PACs de se comunican usando los protocolos de red abiertos como TCP/IP u OPC.
Especficamente los PACs Beckhoff prcticamente estn abiertos a todos los protocolos
industriales como lo son EtherCAT, Lightbus, PROFIBUS DP / FMS, Interbus, CANopen,
Multi-Master , DeviceNet, ControlNet, Modbus, Fipio, CC-Link, SERCOS RS232/RS485,
Ethernet TCP / IP, Ethernet / IP, PROFINET, USB, entre otros.
QU ES UN PLC?
El PLC es un dispositivo electrnico que puede serprogramado por el usuario y se utiliza
en la industria para resolver problemas de secuencias en la maquinaria o
procesos, ahorrando costos en mantenimiento y aumentando la confiabilidad de los
equipos. Es importante conocer sus generalidades y lo que un PLC puede hacer por tu
proceso, pues podras estar gastando mucho dinero en mantenimiento y reparaciones,
cuando estos equipos te solucionan el problema y se pagan slos.
Adems, programar un PLC resulta bastante sencillo. Anteriormente se utilizaban los
sistemas de relevadores pero las desventajas que presentaban eran bastantes; ms
adelante mencionaremos algunas. La historia de los PLC nos dice que fueron
desarrollados por Ingenieros de la GMC (General Motors Company) para sustituir sus
sistemas basados en relevadores.
La palabra PLC es el acrnimo de Controlador Lgico Programable (en ingls
Programmable Logic Controler).
PLCS Y RELEVADORES
Los sistemas de relevadores eran utilizados para un proceso especfico, por lo
tanto su funcin era nica. Pensar en cambiar el proceso era un caos y el cambio requera
volver a obtener la lgica de control y para obtenerla se tenia que realizar un anlisis
matemtico. Tambin haba que modificar el cableado de los relevadores y en algunos
casos incluso era necesario volver a hacer la instalacin del sistema.
En cambio, el PLC es un sistema de microprocesador; en otras palabras una
computadora de tipo industrial. Tiene una Unidad central de procesamiento mejor
conocido como CPU, interfaces de comunicacin, y puertos de salida y entrada de tipo
digital o anlogo, etc., y estas son solo algunas de sus caractersticas ms sobresalientes
CAMPOS DE APLICACIN DEL PLC
En la actualidad el campo de aplicacin de un PLC es muy extenso. Se utilizan
fundamentalmente en procesos de maniobras de mquinas, control, sealizacin, etc. La
aplicacin de un PLC abarca procesos industriales de cualquier tipo y ofrecen conexin a
�red; esto te permite tener comunicado un PLC con una PC y otros dispositivos al mismo
tiempo, permitiendo hacer monitoreo, estadsticas y reportes.
VENTAJAS DEL PLC
Hablar sobre las ventajas que ofrece un PLC es un tema largo, pero aqu te
presentare las ms importantes:
Ofrecen las mismas ventajas sobre la lgica cableada, principalmente por su
variedad de modelos existentes.
Menor tiempo empleado en su elaboracin.
Podrs realizar modificaciones sin cambiar cableado.
La lista de materiales es muy reducida.
Mnimo espacio de aplicacin.
Menor costo.
Mantenimiento econmico por tiempos de paro reducidos.
LAS FUNCIONES BSICAS DE UN PLC SON LAS SIGUIENTES:
Deteccin
El PLC detecta seales del proceso de diferentes tipos.
Mando
Elabora y enva acciones al sistema segn el programa que tenga.
Dialogo hombre maquina
Recibe configuraciones y da reportes al operador de produccin o
supervisores.
Programacin
El programa que utiliza permite modificarlo, incluso por el operador, cuando se
encuentra autorizado.
Por todo esto es evidente que por medio de la implementacin de un sistema de
control
PLC es
posible hacer
automtico prcticamente cualquier
proceso, mejorar laeficiencia y confiabilidad de la maquinaria, y lo ms importante bajar
los costos.En suma, se pagan solos.
DIFERENCIAS Y SIMILITUDES ENTRE UN PAC Y UN PLC
Los PACs y PLCs tienen varias cosas en comn. Internamente, ambos incluyen
una fuente de potencia, un CPU, un plano trasero o dispositivo de E/S, y mdulos. Tienen
registros de memoria que reflejan los canales de E/S individuales en los mdulos. Sin
embargo, las siguientes diferencias resultan muy significativas.
En su estudio de Generalidades de los Controladores Lgicos Programables a
Nivel Mundial, ARC identific 5 caractersticas principales en los PAC:
Funcionalidad de dominio mltiple, al menos dos de lgica, movimiento, control
PID, y proceso en una sola plataforma
Plataforma de desarrollo sencillo de disciplina mltiple incorporando etiquetas
comunes y una base de datos sencilla para tener acceso a todos los parmetros y
funciones
Herramientas de software que permiten disear flujo del proceso a travs de varias
mquinas o unidades de proceso, junto con el IEC 61131-3, gua del usuario y
administracin de datos
Arquitecturas modulares, abiertas que reflejan las aplicaciones industriales a partir
de un despliegue de maquinaria en fbricas en plantas de proceso
Uso de estndares de la industria para interfases en red, lenguajes, etc., como
bsquedas TCP/IP, OPC y XML, y SQL
VENTAJAS DE LOS PACs EN LA ADQUISICI NDE DATOS
Una ventaja de los PAC al compararse con los PLCs, son la habilidad para
procesar y desempear medidas complejas. Con esta caracterstica, puede combinar
diferentes sistemas de adquisicin de datos como frecuencias, formas de onda, voltajes,
corrientes, control de movimiento e incluso, adquisicin de imgenes. Esto crea un nivel
sin precedentes de manipulacin y estandarizacin en trminos del tipo de seales que
pueden manipularse y procesarse. Los PACs ofrecen cientos de funciones para procesar,
analizar y extraer informacin de estas seales.
CAPACIDAD DE PROCESAMIENTO
La plataforma PACs ofrece procesadores de ltima generacin como los intel Core
2 Dou o incluso Core Quad de punto flotante, y proporciona la habilidad para ejecutar
cientos de iteraciones y clculos PID simultneamente, adems de otros controles
robustos como redes neuronales o lgica difusa.
VENTAJAS DE INTEGRACIN CON SISTEMAS ADMINISTRATIVOS
Usted puede conectarse a aplicaciones empresariales y almacenar datos en bases
de datos o redes corporativas ODBC/SQL activadas. Adems, puede utilizar OPC para
integrarse y comunicarse con sistemas de software y hardware de terceros.
Los PACs automticamente publican sus datos de E/S a un servidor OPC
localizado en la computadora tipo servidor usada para configurar el banco de E/S. La
mayora de los paquetes de software SCADA para Windows soportan OPC, y la mayora
de los proveedores de hardware de E/S industrial proporcionan servidores de OPC para
su hardware. Esto hace ms sencilla la integracin de los PACs con una gran variedad de
hardware de E/S industrial como lo son los controladores lgicos programables (PLCs) y
�otros dispositivos industriales. Usted puede utilizar un paquete SCADA de terceros o el
Mdulo de Registro de Datos y Control.
Los mdulo de administracin de los PACs proporciona herramientas incluidas
para administracin de datos, lectura de datos automatizados, acceso a alarmas y
eventos, tendencias histricas y en tiempo real, redes y seguridad. Estas herramientas le
permiten
desarrollar
rpidamente
aplicaciones
de
monitoreo
distribuidos.
De esta manera, procesos creados con los sistemas PACs son de fcil monitoreo y fcil
modificacin por usuarios autorizados ya sea directamente de la unidad de control, o a
travs de un computadora en red ejecutando un software que soporta los protocolos y
tecnologas de comunicacin estndares para la industria.
A nivel de administracin de nodos y centralizacin de plantas se generan
algoritmos complejos que requieren ejecutarse en conjunto con el resto de la planta.
Para estas aplicaciones, los PACs estn mejor equipados debido a su
configuracin y manipulacin flexible, as como el amplio rango de medidas que pueden
desempear.
CUADRO COMPARATIVO:
�Bibliografia:
http://es.slideshare.net/KJEP/aplicaciones-la-transformada-de-laplace1712469
http://ieshuelin.com/huelinwp/download/Tecnologia/Tecnologia
%20industrial/3-SISTEMAS-DE-CONTROL-AUTOMaTICO.pdf
http://www.esi2.us.es/~fercas/documentos/FCA2Tema3.pdf
http://ricardoprieto.es/mediapool/61/615322/data/ITII_FILES/SISTEMAS_AUTO
MATICOS_DE_CONTROL_1_.pdf