También podría gustarte
- Informe de Simulación de TornoDocumento28 páginasInforme de Simulación de TornoMichael ChamorroAún no hay calificaciones
- Cinematica Directa PDFDocumento63 páginasCinematica Directa PDFjavier castilloAún no hay calificaciones
- Cinematica de Todo Tipo de RobotsDocumento15 páginasCinematica de Todo Tipo de RobotsSebastian JacomeAún no hay calificaciones
- Presentación1-Tesis Implementacion de Un Brazo Robotico de Tres Grados LibertadDocumento34 páginasPresentación1-Tesis Implementacion de Un Brazo Robotico de Tres Grados LibertadGustavo Leyva EspezúaAún no hay calificaciones
- 11) Práctica 6 CD Robot ScaraDocumento3 páginas11) Práctica 6 CD Robot ScaraAngel Enrique F. Cruz100% (1)
- Cap 1Documento56 páginasCap 1Joel A. Mamani CarrilloAún no hay calificaciones
- 2 - 2 - Cinemática de Robots - IIDocumento28 páginas2 - 2 - Cinemática de Robots - IIGabriel ParedesAún no hay calificaciones
- Investigar Sobre Cinematica Directa de Robot ManipuladoresDocumento7 páginasInvestigar Sobre Cinematica Directa de Robot ManipuladoresJairo Pérez PérezAún no hay calificaciones
- Modelado Geométrico y Cinemático Del RobotDocumento33 páginasModelado Geométrico y Cinemático Del RobotJc RzAún no hay calificaciones
- Guia Cinematica de RobotsDocumento15 páginasGuia Cinematica de RobotsGerardo Abraham Fernández MurrietaAún no hay calificaciones
- Aplicación de Cinemática DirectaDocumento12 páginasAplicación de Cinemática DirectaEduardo ArriagaAún no hay calificaciones
- Clase8 Tema2.Arquitectura De-Robots-3Documento62 páginasClase8 Tema2.Arquitectura De-Robots-3Edison AlvaradoAún no hay calificaciones
- Cinematica Directa e InversaDocumento22 páginasCinematica Directa e InversaHugo MontañoAún no hay calificaciones
- Robot DeltaDocumento2 páginasRobot DeltaJohnny Romero MiliánAún no hay calificaciones
- Proyecto Final Denavit-HartenbergDocumento4 páginasProyecto Final Denavit-HartenbergByron ArgosAún no hay calificaciones
- Computacion GraficaDocumento15 páginasComputacion GraficaLes JazAún no hay calificaciones
- Calculos Cinematicos DenavitDocumento4 páginasCalculos Cinematicos DenavitCarlos SanchezAún no hay calificaciones
- Cinematica Inversa de Robot SerialDocumento14 páginasCinematica Inversa de Robot Serialjgd1001Aún no hay calificaciones
- Informe Laboratorios Robótica 2.1-2.2-2.3 Cinemática Directa e Inversa y Generación de Trayectorias de Un ManipuladorDocumento6 páginasInforme Laboratorios Robótica 2.1-2.2-2.3 Cinemática Directa e Inversa y Generación de Trayectorias de Un Manipuladordanielw123Aún no hay calificaciones
- DRTECH - RoseM C - GEODIGITAL GROUP - (B)Documento4 páginasDRTECH - RoseM C - GEODIGITAL GROUP - (B)Juan DiazAún no hay calificaciones
- FK Rigging - Asignación de Helpers y Constrains A Brazo MecánicoDocumento3 páginasFK Rigging - Asignación de Helpers y Constrains A Brazo MecánicoNorié CarmasosAún no hay calificaciones
- Prueba 2do Parcial 202151Documento2 páginasPrueba 2do Parcial 202151JORDY NICOLAS BAYAS ESCOBARAún no hay calificaciones
- Cinematica Directa e InversaDocumento5 páginasCinematica Directa e InversaLeonardo RomoAún no hay calificaciones
- CinemáticaDocumento7 páginasCinemáticadiana sanchez belmanAún no hay calificaciones
- Cinematica de Un RobotDocumento7 páginasCinematica de Un Robotakuma119115Aún no hay calificaciones
- Ejemplo D-H Con AnimacionDocumento16 páginasEjemplo D-H Con AnimaciongermainAún no hay calificaciones
- Sprutcam X EspDocumento34 páginasSprutcam X EsphhAún no hay calificaciones
- Cinemativa InversaDocumento36 páginasCinemativa InversaJhanson Gualberto Alvarez PerezAún no hay calificaciones
- CRM Cap1 Clase1 Cinematica 1 PDFDocumento51 páginasCRM Cap1 Clase1 Cinematica 1 PDFConcepcion Mota MAún no hay calificaciones
- Sesión 4-Cinemática DirectaDocumento29 páginasSesión 4-Cinemática DirectaAdrian MejiasAún no hay calificaciones
- Sesión 5-Cinemática InversaDocumento21 páginasSesión 5-Cinemática InversaAdrian MejiasAún no hay calificaciones
- Fundamentos de Robótica (2a. Ed.) - (PG 136 - 155)Documento20 páginasFundamentos de Robótica (2a. Ed.) - (PG 136 - 155)ROSA MARIA MAHECHA ACHAGUAAún no hay calificaciones
- Producto Acreditable Y2 - Lema LuisDocumento3 páginasProducto Acreditable Y2 - Lema LuisDavid LemaAún no hay calificaciones
- Actuadores RoboticosDocumento26 páginasActuadores RoboticosCristopher BecerraAún no hay calificaciones
- Clase17 Tema5.Generación de TrayectoriasDocumento56 páginasClase17 Tema5.Generación de TrayectoriasKaren July Riera GAún no hay calificaciones
- Planificación Microcurricular 7Documento6 páginasPlanificación Microcurricular 7MAYRA ALEXANDRA PIBAQUE CASTILLOAún no hay calificaciones
- Modelo Cinemático Directo Del Robot CRS Robotics A465Documento29 páginasModelo Cinemático Directo Del Robot CRS Robotics A465FernandoAún no hay calificaciones
- Tema 4 JacobianoDocumento16 páginasTema 4 Jacobianovjvargas88Aún no hay calificaciones
- Practica No. 1 Robotica (Robot Irb120)Documento9 páginasPractica No. 1 Robotica (Robot Irb120)Walther EstevezAún no hay calificaciones
- Geomagic For SolidworksDocumento4 páginasGeomagic For SolidworksPaul Veramendi100% (1)
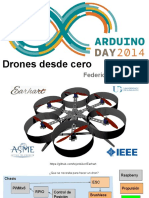
- Drones Desde CeroDocumento17 páginasDrones Desde CeroJoseAún no hay calificaciones
- Equipo 4Documento1 páginaEquipo 4cris lopezAún no hay calificaciones
- Ejercicio Robot RPPRDocumento2 páginasEjercicio Robot RPPRdaniel saaverdraAún no hay calificaciones
- Fase 3 - Realizar Lluvia de IdeasDocumento4 páginasFase 3 - Realizar Lluvia de IdeasSilvio Villegas MendezAún no hay calificaciones
- El Robot ScaraDocumento8 páginasEl Robot ScaraJordan BenítezAún no hay calificaciones
- Dante 2Documento1 páginaDante 2danielAún no hay calificaciones
- Robotic Workshop Infographics by SlidesgoDocumento9 páginasRobotic Workshop Infographics by SlidesgoGeorge Samuel De Los Santo TaveraAún no hay calificaciones
- Diferencias Entre Modelo Cinemático Directo e InversoDocumento6 páginasDiferencias Entre Modelo Cinemático Directo e InversoalbeiromarinsosaAún no hay calificaciones
- Clase18 Tema5.Generación de TrayectoriasDocumento25 páginasClase18 Tema5.Generación de TrayectoriasKaren July Riera GAún no hay calificaciones
- Aporte Individual Fase 3 Robotica Realizar El Modelamiento Cinematico Del Sistema RoboticoDocumento8 páginasAporte Individual Fase 3 Robotica Realizar El Modelamiento Cinematico Del Sistema Roboticocarlos andres jaimes ruizAún no hay calificaciones
- Manipulador Robotico de 3 Grados de LibertadDocumento6 páginasManipulador Robotico de 3 Grados de LibertadRICHAR1051100% (4)
- Diferentes EdicionesDocumento25 páginasDiferentes EdicionesLuis Angel Garay CamachoAún no hay calificaciones
- Cinemática Del RobotsDocumento3 páginasCinemática Del RobotsAlexis RiveraAún no hay calificaciones
- Clase18 Tema5.Generación de TrayectoriasDocumento25 páginasClase18 Tema5.Generación de TrayectoriasJean Carlos VillegasAún no hay calificaciones
- Tipos de Modelado CinematicoDocumento5 páginasTipos de Modelado CinematicoJorge MendezAún no hay calificaciones
- Espel Mec 0138 PDocumento30 páginasEspel Mec 0138 PJuank Ñ LduAún no hay calificaciones
- Matrices Conducidas Por Curva y El PropertyManager Matriz ConducDocumento7 páginasMatrices Conducidas Por Curva y El PropertyManager Matriz ConducJosé Alberto Campos MartinezAún no hay calificaciones
- Construcción de Un Prototipo Robot Antropomórfico deDocumento38 páginasConstrucción de Un Prototipo Robot Antropomórfico debryanderAún no hay calificaciones
- Brazo Robótico 5GDL Procesos de Vacunacion de Ganado1Documento18 páginasBrazo Robótico 5GDL Procesos de Vacunacion de Ganado1Jhoel MedranoAún no hay calificaciones
- Proyecto Electrico ExamenDocumento13 páginasProyecto Electrico ExamenAriel Bastian Ramos MilchioAún no hay calificaciones
- Calculos Justificativos Luminotenicos Rozas RaaschDocumento22 páginasCalculos Justificativos Luminotenicos Rozas RaaschAriel Bastian Ramos MilchioAún no hay calificaciones
- PROYECTO 1: Eficiencia Energética: DUOC UC, Sede San AndrésDocumento15 páginasPROYECTO 1: Eficiencia Energética: DUOC UC, Sede San AndrésAriel Bastian Ramos MilchioAún no hay calificaciones
- Proyecto InformeDocumento1 páginaProyecto InformeAriel Bastian Ramos MilchioAún no hay calificaciones
- Proyecto InformmmmeDocumento53 páginasProyecto InformmmmeAriel Bastian Ramos MilchioAún no hay calificaciones
- Infografia N°3Documento4 páginasInfografia N°3Ariel Bastian Ramos MilchioAún no hay calificaciones
- BPMN 2.0 PDFDocumento1 páginaBPMN 2.0 PDFAriel Bastian Ramos MilchioAún no hay calificaciones
- Nota N4 Robotica Orellana Ramos Millar.Documento9 páginasNota N4 Robotica Orellana Ramos Millar.Ariel Bastian Ramos MilchioAún no hay calificaciones