También podría gustarte
- Sistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208De EverandSistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208Aún no hay calificaciones
- Mantenimiento de los dispositivos eléctricos de habitáculo y cofre motor. TMVG0209De EverandMantenimiento de los dispositivos eléctricos de habitáculo y cofre motor. TMVG0209Calificación: 5 de 5 estrellas5/5 (2)
- PLC FinDocumento10 páginasPLC Finvideos randomAún no hay calificaciones
- Bottle Line - InformeDocumento10 páginasBottle Line - InformeRenzo Garcia CanalesAún no hay calificaciones
- Supletorio Control IIDocumento18 páginasSupletorio Control IIAnonymous phMkLfqd9IAún no hay calificaciones
- Trabajo SemaforoDocumento10 páginasTrabajo SemaforoMichael CorralesAún no hay calificaciones
- 02700033C Analizado Gases 2Documento44 páginas02700033C Analizado Gases 2Medel E JonathanAún no hay calificaciones
- Unidad 3Documento14 páginasUnidad 3Hector PachecoAún no hay calificaciones
- Reporte Practica 3 - InstruDocumento9 páginasReporte Practica 3 - InstruLuis RamírezAún no hay calificaciones
- Temario Del Nivel 2 de InyeccionDocumento23 páginasTemario Del Nivel 2 de InyeccionfabianAún no hay calificaciones
- Amtd - Amtd-605 - Formatoalumnotrabajofinal 01Documento13 páginasAmtd - Amtd-605 - Formatoalumnotrabajofinal 01Dayni CárdenasAún no hay calificaciones
- Calibrador VIGIADocumento11 páginasCalibrador VIGIAPaul CarrilloAún no hay calificaciones
- Fase 0 - Contextualizar La Automatización Industrial Control DigitalDocumento22 páginasFase 0 - Contextualizar La Automatización Industrial Control DigitalYecid Fabian AlvaradoAún no hay calificaciones
- Luis Naranjo Informe OsciloscopioDocumento21 páginasLuis Naranjo Informe OsciloscopioLuis Naranjo TipánAún no hay calificaciones
- Laboratorio de Temporizadores Llenado de BotellasDocumento17 páginasLaboratorio de Temporizadores Llenado de BotellasFernandoAún no hay calificaciones
- Llenado de Bote de Pintura - Pliego de Especificaciones FinalDocumento11 páginasLlenado de Bote de Pintura - Pliego de Especificaciones FinalGary DiazAún no hay calificaciones
- TecnologicoDocumento10 páginasTecnologicoHéctor Manuel Rodríguez FelicianoAún no hay calificaciones
- Trabajo trt1 - Control de ProcesosDocumento19 páginasTrabajo trt1 - Control de Procesosjose lopezAún no hay calificaciones
- Maquinas - Sistemas de Control. Tecnología 3 ESODocumento45 páginasMaquinas - Sistemas de Control. Tecnología 3 ESOadriana carolina rodriguez santamariaAún no hay calificaciones
- Informe Proyecto Clasificador de ColorDocumento11 páginasInforme Proyecto Clasificador de ColorGladys Ferrer PachecoAún no hay calificaciones
- Informe Andres 2024 BuenoDocumento10 páginasInforme Andres 2024 BuenoAndres pro Rivas MuñozAún no hay calificaciones
- Mezclador Control 1Documento24 páginasMezclador Control 1anon_433190065Aún no hay calificaciones
- Sensor EgoDocumento9 páginasSensor EgoCarlos BeltránAún no hay calificaciones
- Practica # 1, 2, 3Documento16 páginasPractica # 1, 2, 3JAIME MORALESAún no hay calificaciones
- Senso 1Documento22 páginasSenso 1Steven JosueAún no hay calificaciones
- Proyecto 1 Redes IndustrialesDocumento3 páginasProyecto 1 Redes IndustrialesMilton Fonseca ZuritaAún no hay calificaciones
- Amtd - Amtd-605 - Formatoalumnotrabajofinal 01Documento19 páginasAmtd - Amtd-605 - Formatoalumnotrabajofinal 01Dayni CárdenasAún no hay calificaciones
- Informe Clasificador Por PesoDocumento7 páginasInforme Clasificador Por PesoIvan RamosAún no hay calificaciones
- Informe Practica Banqueo Ecu AutotronicaDocumento17 páginasInforme Practica Banqueo Ecu AutotronicaPaul Dutan100% (2)
- Guia 2Documento16 páginasGuia 2Ricardo PonceAún no hay calificaciones
- Proyecto Domotico Con LogoDocumento22 páginasProyecto Domotico Con LogoJuan Carlos Saravia PérezAún no hay calificaciones
- Guión de Prácticas de Electronica BásicaDocumento34 páginasGuión de Prácticas de Electronica BásicaMiguel Angel Rodriguez ValdellosAún no hay calificaciones
- Informe Computadoras AutomotricesDocumento9 páginasInforme Computadoras AutomotricesEdwin NivicelaAún no hay calificaciones
- E3 Sensores y Actuadores PiaDocumento20 páginasE3 Sensores y Actuadores PiaJorge MendezAún no hay calificaciones
- INFORME OsciloscopioDocumento6 páginasINFORME OsciloscopioJvlio OcampoAún no hay calificaciones
- Autoclave Youjoy de 17 y 22 Ltrs en Español ManualDocumento33 páginasAutoclave Youjoy de 17 y 22 Ltrs en Español ManualRoberto Andres Vasquez Campusano63% (8)
- Comprobador Universal de SensoresDocumento13 páginasComprobador Universal de SensoresDario MayancelaAún no hay calificaciones
- Parcial AutomatizacionDocumento9 páginasParcial Automatizacionandy77740100% (2)
- Reporte Proyecto Final Automatizacion de TolvasDocumento10 páginasReporte Proyecto Final Automatizacion de TolvasAlejandro GuerreroAún no hay calificaciones
- Manual Whirpol PDFDocumento16 páginasManual Whirpol PDFIsai Samuel Arellano40% (5)
- Sistema Electrónico Del AutomóvilDocumento9 páginasSistema Electrónico Del Automóvilcesar condoriAún no hay calificaciones
- Guia Del Sensor EctDocumento8 páginasGuia Del Sensor EctMauricio SarangoAún no hay calificaciones
- DosificadorDocumento16 páginasDosificadorAndres CarvajalAún no hay calificaciones
- Sensores HyundaiDocumento9 páginasSensores Hyundaialdo espinozaAún no hay calificaciones
- Sensores ReporteDocumento14 páginasSensores ReporteJONATHAN HERNANDEZ BARONAún no hay calificaciones
- Obd II Periodos MantenimientoDocumento522 páginasObd II Periodos Mantenimientofregon226Aún no hay calificaciones
- Emit Emit-517 TrabajofinalDocumento4 páginasEmit Emit-517 TrabajofinalAracely98Aún no hay calificaciones
- Sensor MAP - Inyección Electrónica.Documento6 páginasSensor MAP - Inyección Electrónica.Héctor CangásAún no hay calificaciones
- Sensor Map 1Documento9 páginasSensor Map 1Sergio Gustavo Herrera ArellanoAún no hay calificaciones
- Practica Sensor MAPDocumento10 páginasPractica Sensor MAPAndres Jaramillo100% (1)
- Anexo 3Documento18 páginasAnexo 3luisAún no hay calificaciones
- Lab 10 AutomatizacionDocumento17 páginasLab 10 Automatizacionelias.huisacaynaAún no hay calificaciones
- 902 H2S EspañolDocumento92 páginas902 H2S EspañolMiguel Ignacio Roman BarreraAún no hay calificaciones
- Control Por PLC Maquina Mezcladora de Dos IngredientesDocumento13 páginasControl Por PLC Maquina Mezcladora de Dos IngredientesIEduardo Gomez Silva0% (1)
- Dise Ñ o y Programacion de Una Maquina Clasificadora Por ColorDocumento38 páginasDise Ñ o y Programacion de Una Maquina Clasificadora Por ColorAlejandro Pupunovich RodriguezAún no hay calificaciones
- Tratamiento de Agua MultiparametrosDocumento56 páginasTratamiento de Agua MultiparametrosclarivethAún no hay calificaciones
- Playa de Estacionamiento - Proyecto PLCDocumento15 páginasPlaya de Estacionamiento - Proyecto PLCJerry Rodriguez FloresAún no hay calificaciones
- Sensor de Presion Absoluta Map: Universidad EcciDocumento10 páginasSensor de Presion Absoluta Map: Universidad EccicamiloAún no hay calificaciones
- Practica 3 - Semaforo Con LimitsDocumento12 páginasPractica 3 - Semaforo Con LimitsDavid SanAún no hay calificaciones
- Preparación y regulación de los sistemas de alimentación en máquinas de impresión offset. ARGI0109De EverandPreparación y regulación de los sistemas de alimentación en máquinas de impresión offset. ARGI0109Aún no hay calificaciones
- Sensoresinductivosdocumento 110808114751 Phpapp02Documento22 páginasSensoresinductivosdocumento 110808114751 Phpapp02Armando Aponte RodriguezAún no hay calificaciones
- Eduardo Landa Gonzalez 2021Documento272 páginasEduardo Landa Gonzalez 2021Eduardo Landa GonzalezAún no hay calificaciones
- Mejora de Grafica para Monitoreo de La CronosDocumento3 páginasMejora de Grafica para Monitoreo de La CronosEduardo Landa GonzalezAún no hay calificaciones
- Mejoras Unidad 4Documento20 páginasMejoras Unidad 4Eduardo Landa GonzalezAún no hay calificaciones
- Instituto Tecnologico Superior de AcayucanDocumento2 páginasInstituto Tecnologico Superior de AcayucanEnrique Perez TorresAún no hay calificaciones
- Sensor Inductivo 1226284428444231 9Documento11 páginasSensor Inductivo 1226284428444231 9Eduardo Landa GonzalezAún no hay calificaciones
- Estudio de MercadoDocumento46 páginasEstudio de MercadoingdannyAún no hay calificaciones
- Sensor Inductivo 1226284428444231 9Documento10 páginasSensor Inductivo 1226284428444231 9Eduardo Landa GonzalezAún no hay calificaciones
- VENTILADOR DE HASIRACION 824nuevo Informe 7Documento1 páginaVENTILADOR DE HASIRACION 824nuevo Informe 7Eduardo Landa GonzalezAún no hay calificaciones
- Precios - Conexiones y Accersiors - Nacobre-Compressed PDFDocumento14 páginasPrecios - Conexiones y Accersiors - Nacobre-Compressed PDFMariela GuzmánAún no hay calificaciones
- Mantenimiento Preventivo Cocedor 3Documento6 páginasMantenimiento Preventivo Cocedor 3Eduardo Landa GonzalezAún no hay calificaciones
- Mejora de Grafica para Monitoreo de La CronosDocumento3 páginasMejora de Grafica para Monitoreo de La CronosEduardo Landa GonzalezAún no hay calificaciones
- Precios - Tuberia - Nacobre-CompressedDocumento4 páginasPrecios - Tuberia - Nacobre-CompressedEduardo Landa GonzalezAún no hay calificaciones
- Procedimiento para Cambio de Flujo Máximo en Dosificación de Rosca BULLERDocumento2 páginasProcedimiento para Cambio de Flujo Máximo en Dosificación de Rosca BULLEREduardo Landa GonzalezAún no hay calificaciones
- Lista de Pistones y RefacionamientoDocumento1 páginaLista de Pistones y RefacionamientoEduardo Landa GonzalezAún no hay calificaciones
- Material para Control de Vapor en Cocedor 5Documento1 páginaMaterial para Control de Vapor en Cocedor 5Eduardo Landa GonzalezAún no hay calificaciones
- Regulador de Presion Con Lubricacion AutomaticaDocumento2 páginasRegulador de Presion Con Lubricacion AutomaticaEduardo Landa GonzalezAún no hay calificaciones
- Procedimiento para Cambio de Flujo Máximo en Dosificación de Rosca BULLERDocumento2 páginasProcedimiento para Cambio de Flujo Máximo en Dosificación de Rosca BULLEREduardo Landa GonzalezAún no hay calificaciones
- Material para Control de Vapor en Cocedor 5Documento1 páginaMaterial para Control de Vapor en Cocedor 5Eduardo Landa GonzalezAún no hay calificaciones
- Material para Control de Vapor en Cocedor 5Documento1 páginaMaterial para Control de Vapor en Cocedor 5Eduardo Landa GonzalezAún no hay calificaciones
- Mejoras Implementadas OCCDocumento45 páginasMejoras Implementadas OCCEduardo Landa GonzalezAún no hay calificaciones
- Proyecto de Mejora Intercambiador de CalorDocumento1 páginaProyecto de Mejora Intercambiador de CalorEnrique Perez TorresAún no hay calificaciones
- Mejoras Implementadas OCCDocumento45 páginasMejoras Implementadas OCCEduardo Landa GonzalezAún no hay calificaciones
- Formato de Usuario 2020 atDocumento10 páginasFormato de Usuario 2020 atEduardo Landa GonzalezAún no hay calificaciones
- Termografia de Mangueras de Vapor de Cocedores 24-09-2020Documento4 páginasTermografia de Mangueras de Vapor de Cocedores 24-09-2020Eduardo Landa GonzalezAún no hay calificaciones
- Proyecto de Mejora Intercambiador de CalorDocumento1 páginaProyecto de Mejora Intercambiador de CalorEnrique Perez TorresAún no hay calificaciones
- Instituto Tecnologico Superior de AcayucanDocumento2 páginasInstituto Tecnologico Superior de AcayucanEnrique Perez TorresAún no hay calificaciones
- Mejora de Grafica para Monitoreo de La CronosDocumento3 páginasMejora de Grafica para Monitoreo de La CronosEduardo Landa GonzalezAún no hay calificaciones
- Lista de Pistones y RefacionamientoDocumento1 páginaLista de Pistones y RefacionamientoEduardo Landa GonzalezAún no hay calificaciones
- Tutorial Como Crear Un Contador FLIP-FLOP Mod 60Documento7 páginasTutorial Como Crear Un Contador FLIP-FLOP Mod 60Eduardo MoralesAún no hay calificaciones
- Material Complementario Clase 3 - Industria 4.0Documento7 páginasMaterial Complementario Clase 3 - Industria 4.0Angel G. GomezAún no hay calificaciones
- GuianAP9 846533ce1da1bcdDocumento18 páginasGuianAP9 846533ce1da1bcdmanuel solarteAún no hay calificaciones
- Qué Tres Opciones Asocian Correctamente Una Capa Del Modelo de Diseño Jerárquico y Su FunciónDocumento2 páginasQué Tres Opciones Asocian Correctamente Una Capa Del Modelo de Diseño Jerárquico y Su Funciónleito26Aún no hay calificaciones
- Sistemas de Información EmpresarialDocumento4 páginasSistemas de Información Empresarialluiza zapataAún no hay calificaciones
- Perfect KeyloggerDocumento9 páginasPerfect KeyloggerRoot KAún no hay calificaciones
- CivilDocumento71 páginasCivilCheng AcuñaAún no hay calificaciones
- Circuito de Tomacorrientes de Una ViviendaDocumento5 páginasCircuito de Tomacorrientes de Una ViviendaJuan Frank Ruiz MitteennAún no hay calificaciones
- El Dilema Del Taxista - AbpDocumento2 páginasEl Dilema Del Taxista - AbpJwsus Fc Crew VociferoAún no hay calificaciones
- Libro1 (Autoguardado)Documento5 páginasLibro1 (Autoguardado)Agustina abrahamerAún no hay calificaciones
- Padrón de Proveedores 2016Documento351 páginasPadrón de Proveedores 2016Gierman StaceyAún no hay calificaciones
- EL PROHIBIDO 2do Parcial TdCyA PDFDocumento77 páginasEL PROHIBIDO 2do Parcial TdCyA PDFJason Fernández GarciaAún no hay calificaciones
- Ejercicios y Actividades Valor 10%Documento30 páginasEjercicios y Actividades Valor 10%jhonson felixAún no hay calificaciones
- s7 Tarea Set A Matma1102Documento3 páginass7 Tarea Set A Matma1102Ignacio Mondaca Fuentes0% (3)
- Kecd U1 Ea XXXDocumento7 páginasKecd U1 Ea XXXEfra RinconAún no hay calificaciones
- 501 405109 1 20 r2.0 KFP Af Series Installation Manual Spanish 1033 PDFDocumento120 páginas501 405109 1 20 r2.0 KFP Af Series Installation Manual Spanish 1033 PDFlada1119Aún no hay calificaciones
- Características de Una Buena Experiencia de UsuarioDocumento3 páginasCaracterísticas de Una Buena Experiencia de UsuariogeorgefloydfanAún no hay calificaciones
- Fase 3 Presentacion Diapositiva Servicio SocialDocumento19 páginasFase 3 Presentacion Diapositiva Servicio Socialluisgomezpasion1Aún no hay calificaciones
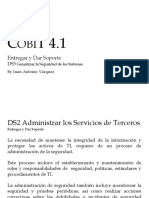
- COBIT 4.1. Entregar y Dar Soporte DS5 Garantizar La Seguridad de Los Sistemas. by Juan Antonio VásquezDocumento33 páginasCOBIT 4.1. Entregar y Dar Soporte DS5 Garantizar La Seguridad de Los Sistemas. by Juan Antonio VásquezAlexander Leon FlorezAún no hay calificaciones
- DMMS U1 A4 JolvDocumento7 páginasDMMS U1 A4 JolvprogsAún no hay calificaciones
- Abraham Plascencia U5 T3Documento6 páginasAbraham Plascencia U5 T3AbramPlascenciaAún no hay calificaciones
- Edgar Fase2 TelecontrolDocumento13 páginasEdgar Fase2 TelecontrolEDGAR JAVIER VARGAS SOSAAún no hay calificaciones
- Articulo Modificado Tecnia Ing. MendozaDocumento8 páginasArticulo Modificado Tecnia Ing. MendozaMayAún no hay calificaciones
- Operadores LogísticosDocumento26 páginasOperadores LogísticosYakuza Korps100% (1)
- Seguridad de Kernel Selinux and ApparmorDocumento6 páginasSeguridad de Kernel Selinux and Apparmorcarlos rivasAún no hay calificaciones
- ¿Qué Es AgilidadDocumento6 páginas¿Qué Es Agilidadjgiorgi_1Aún no hay calificaciones
- Capacitacion MEF - IOARR en Situacion de Emergencia - 2021 - 04 - 21Documento43 páginasCapacitacion MEF - IOARR en Situacion de Emergencia - 2021 - 04 - 21Ruben Castañeda CastilloAún no hay calificaciones
- Redes. Revista de Estudios Sociales de La Ciencia y La Tecnología #45Documento169 páginasRedes. Revista de Estudios Sociales de La Ciencia y La Tecnología #45Diego Hernán DellagiovannaAún no hay calificaciones
- Informe Vinculación Municipio Daniel LópezDocumento25 páginasInforme Vinculación Municipio Daniel LópezDaniel LopezAún no hay calificaciones
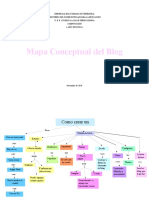
- Blog Mapa MentalDocumento2 páginasBlog Mapa MentalNicolle AlejandraAún no hay calificaciones