También podría gustarte
- Jeep ZJ 1993 - Service Manual - Secc 08W Diagramas de Cableado PDFDocumento506 páginasJeep ZJ 1993 - Service Manual - Secc 08W Diagramas de Cableado PDFYanny Zuñiga33% (3)
- Proyectos de instalaciones eléctrica de baja tensiónDe EverandProyectos de instalaciones eléctrica de baja tensiónCalificación: 5 de 5 estrellas5/5 (1)
- 750-197 Hawk ICS 2004 Spanish - EspanolDocumento78 páginas750-197 Hawk ICS 2004 Spanish - EspanolBruno PatracaAún no hay calificaciones
- Manual de Implementacion Programa 5s PDFDocumento18 páginasManual de Implementacion Programa 5s PDFlitalomp05Aún no hay calificaciones
- Alecop - Manual de Cableado PDFDocumento203 páginasAlecop - Manual de Cableado PDFDavidAún no hay calificaciones
- Diagramas FiestaDocumento188 páginasDiagramas FiestaCharly RodriguezAún no hay calificaciones
- Montaje de redes eléctricas aéreas de alta tensión. ELEE0209De EverandMontaje de redes eléctricas aéreas de alta tensión. ELEE0209Calificación: 4.5 de 5 estrellas4.5/5 (2)
- Cadena Suministro AnalísisDocumento2 páginasCadena Suministro AnalísisCristian MarroquinAún no hay calificaciones
- Acople DielectricoDocumento2 páginasAcople DielectricoLuciano Luiz VadallaresAún no hay calificaciones
- Conexion y PerifericosDocumento21 páginasConexion y PerifericosarturoAún no hay calificaciones
- Memoria Detalles Instalacion Electrica Extrusado AvexDocumento13 páginasMemoria Detalles Instalacion Electrica Extrusado AvexGuillermoAún no hay calificaciones
- Periferia Kuka KR2Documento21 páginasPeriferia Kuka KR2Jorge MatitoAún no hay calificaciones
- AN100126.003 - Instrucciones de Montaje, Manejo y Mantenimiento para ABUS-Grúa Pluma Oscilante Mural LWDocumento20 páginasAN100126.003 - Instrucciones de Montaje, Manejo y Mantenimiento para ABUS-Grúa Pluma Oscilante Mural LWsebastian verdugo100% (1)
- Common Rail NissanDocumento41 páginasCommon Rail NissanAgsinyeccion Electricidad Automotriz83% (29)
- 08 Reparación Servomotores RobotDocumento16 páginas08 Reparación Servomotores RobotRicardo Felipe Cortes MenayAún no hay calificaciones
- AN120055.002 - Instrucciones de Montaje Polipasto de CableDocumento12 páginasAN120055.002 - Instrucciones de Montaje Polipasto de CableCristian Garcia GuzmanAún no hay calificaciones
- Conexion Generador Planta OlimpianDocumento16 páginasConexion Generador Planta Olimpianvictor laraAún no hay calificaciones
- CSX PDFDocumento16 páginasCSX PDFEduardo ChavezAún no hay calificaciones
- CTS 630aDocumento1 páginaCTS 630aGerardoAún no hay calificaciones
- Kit de VibracionDocumento32 páginasKit de VibracionAlexVelasquezQAún no hay calificaciones
- Manual de Servicio de OPERADocumento45 páginasManual de Servicio de OPERAYasiel Serrano PadrónAún no hay calificaciones
- Seccionadores+OT OSDocumento84 páginasSeccionadores+OT OSEloy CondoriAún no hay calificaciones
- SP Premium DCiDocumento226 páginasSP Premium DCiservicioAún no hay calificaciones
- Conexiones Eléctricas OmarDocumento7 páginasConexiones Eléctricas OmarAlberto DucatiAún no hay calificaciones
- Kinetix 350 - Es-P PDFDocumento156 páginasKinetix 350 - Es-P PDFSergio Pretell Villa100% (1)
- Sin TítuloDocumento56 páginasSin TítuloandrestkaAún no hay calificaciones
- Dibujo Fibra OpticaDocumento8 páginasDibujo Fibra OpticaAntonio RiverosAún no hay calificaciones
- 13 Cableado de Armarios y HuecoDocumento40 páginas13 Cableado de Armarios y Huecogustavo sanchez100% (2)
- 12-Folleto Técnico Del Tablero de Media Tensión ABBDocumento15 páginas12-Folleto Técnico Del Tablero de Media Tensión ABBJosé Ignacio MoroAún no hay calificaciones
- Memoria de Calculo de Linea de Vida Sobre CancamoDocumento9 páginasMemoria de Calculo de Linea de Vida Sobre CancamoANGHELO FRANK PANDURO BAZANAún no hay calificaciones
- DecanterDocumento94 páginasDecanterEmmanuel MonroyAún no hay calificaciones
- Abb Acs 100 VariadorDocumento56 páginasAbb Acs 100 VariadorPatrick ClarkeAún no hay calificaciones
- Metodo de Instalacion 1830 Pss-32 para Proyecto Tres Anillos DWDM AlestraDocumento49 páginasMetodo de Instalacion 1830 Pss-32 para Proyecto Tres Anillos DWDM AlestraM Casanova PI80% (5)
- 035 - Cableado PDFDocumento506 páginas035 - Cableado PDFFernando Moreno GallegosAún no hay calificaciones
- vkrc2 Peripher EsDocumento24 páginasvkrc2 Peripher EsJuan Jimenez100% (1)
- ALLEN BRADLEY - Variador Velocidad - 7000 - Manual PDFDocumento510 páginasALLEN BRADLEY - Variador Velocidad - 7000 - Manual PDFvamadi04Aún no hay calificaciones
- Modulos 9030Documento329 páginasModulos 9030Julio Cesar Balanzar SánchezAún no hay calificaciones
- Conexion PerifericosDocumento20 páginasConexion PerifericosOmar Gerardo Sida LopezAún no hay calificaciones
- EDEL K2 Castellano 643VF-005 R01Documento37 páginasEDEL K2 Castellano 643VF-005 R01CarlosAún no hay calificaciones
- Estandar de Instalacion BBU3900 GSM LC-LS V1.2Documento35 páginasEstandar de Instalacion BBU3900 GSM LC-LS V1.2Halim CuaddraAún no hay calificaciones
- Catálogo SolarDocumento16 páginasCatálogo SolarFrancisco LemusAún no hay calificaciones
- Esq Elec O500 RS RSD 2B314866 PDFDocumento72 páginasEsq Elec O500 RS RSD 2B314866 PDFSebastian Andres Sepulveda Goler100% (2)
- Compendio Lineas de TransmisionDocumento480 páginasCompendio Lineas de Transmisionluis100% (5)
- Retrofit Master Pact M Plugnplay - En.esDocumento30 páginasRetrofit Master Pact M Plugnplay - En.esalexel_unamAún no hay calificaciones
- Sistema Eléctrico: H40.00-48.00XM-12 (H800-1050HD/HDS) (A917)Documento20 páginasSistema Eléctrico: H40.00-48.00XM-12 (H800-1050HD/HDS) (A917)Cristian Rodriguez OjedaAún no hay calificaciones
- 710-09094-00B CSXi User Manual ES - WebDocumento12 páginas710-09094-00B CSXi User Manual ES - Webcharly6c100% (1)
- 4.1 Mane-7313-Mc-002 - Smeb-RbDocumento13 páginas4.1 Mane-7313-Mc-002 - Smeb-RbL4ncel0tAún no hay calificaciones
- Nte Inen 2139Documento12 páginasNte Inen 2139carlosutcAún no hay calificaciones
- Spe 125 RMDocumento254 páginasSpe 125 RMGaby Djin Themix100% (5)
- 1txa0cc001d0703 Control (Arrancadores Suaves)Documento35 páginas1txa0cc001d0703 Control (Arrancadores Suaves)metanoia88Aún no hay calificaciones
- Anexo 2 PMGD Central Biomasa Rio ItataDocumento4 páginasAnexo 2 PMGD Central Biomasa Rio ItataANTONIA ISIDORA NAVARROAún no hay calificaciones
- 2 03 06 (2 0)Documento30 páginas2 03 06 (2 0)tarzanpuyolAún no hay calificaciones
- 2Documento2 páginas2chendo2006Aún no hay calificaciones
- tpu2000R-Unidad de Protección de TransformadoresDocumento177 páginastpu2000R-Unidad de Protección de TransformadoresJ Jesus Aradillas100% (1)
- Montaje de instalaciones eléctricas de enlace en edificios. ELEE0109De EverandMontaje de instalaciones eléctricas de enlace en edificios. ELEE0109Aún no hay calificaciones
- Guía práctica de eficiencia energética en alumbrado exteriorDe EverandGuía práctica de eficiencia energética en alumbrado exteriorAún no hay calificaciones
- Reparación de instalaciones automatizadas. ELEE0109De EverandReparación de instalaciones automatizadas. ELEE0109Aún no hay calificaciones
- Montaje de redes eléctricas aéreas de baja tensión. ELEE0109De EverandMontaje de redes eléctricas aéreas de baja tensión. ELEE0109Aún no hay calificaciones
- Fundamentos de electrónica analógicaDe EverandFundamentos de electrónica analógicaCalificación: 5 de 5 estrellas5/5 (1)
- Control neuronal y difuso para sistemas fotovoltaicosDe EverandControl neuronal y difuso para sistemas fotovoltaicosAún no hay calificaciones
- Montaje de redes eléctricas subterráneas de alta tensión. ELEE0209De EverandMontaje de redes eléctricas subterráneas de alta tensión. ELEE0209Aún no hay calificaciones
- Guía de instalación para viviendasDe EverandGuía de instalación para viviendasCalificación: 5 de 5 estrellas5/5 (1)
- Guía de instalación para locales de pública concurrenciaDe EverandGuía de instalación para locales de pública concurrenciaCalificación: 5 de 5 estrellas5/5 (1)
- Levantamiento Parametros TK'SDocumento13 páginasLevantamiento Parametros TK'SRick CAún no hay calificaciones
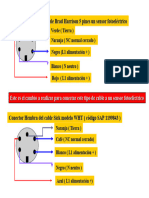
- Cable Sick WHT (119843)Documento1 páginaCable Sick WHT (119843)Rick CAún no hay calificaciones
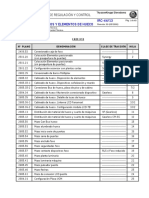
- Válvulas de Corte Block Filtro Bomba Auxiliar UPHDocumento7 páginasVálvulas de Corte Block Filtro Bomba Auxiliar UPHRick CAún no hay calificaciones
- Configuracion de Sa y AP 10 Versión 5.1.37 Por HyperterminalDocumento10 páginasConfiguracion de Sa y AP 10 Versión 5.1.37 Por HyperterminalRick CAún no hay calificaciones
- Instructivo Calibracion Basculas Patio EmbarqueDocumento1 páginaInstructivo Calibracion Basculas Patio EmbarqueRick CAún no hay calificaciones
- Carga MagelisDocumento8 páginasCarga MagelisRick CAún no hay calificaciones
- Manual Concept t3Documento378 páginasManual Concept t3Rick CAún no hay calificaciones
- Configuracion de SA y AP 10 Version 4.211PORHYPERTERMINALDocumento10 páginasConfiguracion de SA y AP 10 Version 4.211PORHYPERTERMINALRick CAún no hay calificaciones
- Manual Concept t2Documento358 páginasManual Concept t2Rick CAún no hay calificaciones
- PNOZ X3 Data Sheet 1002239-ES-02Documento9 páginasPNOZ X3 Data Sheet 1002239-ES-02Rick CAún no hay calificaciones
- HDPEDocumento2 páginasHDPEvpizarro_23Aún no hay calificaciones
- Cable Magelis A PCDocumento1 páginaCable Magelis A PCRick CAún no hay calificaciones
- Curso MagelisDocumento93 páginasCurso MagelisRick CAún no hay calificaciones
- IsometricosDocumento7 páginasIsometricosRick CAún no hay calificaciones
- Parametros CarruselesDocumento6 páginasParametros CarruselesRick CAún no hay calificaciones
- Proyecto Final Semana 9 Materiales CombuDocumento18 páginasProyecto Final Semana 9 Materiales CombuRick CAún no hay calificaciones
- IsometricosDocumento2 páginasIsometricosRick CAún no hay calificaciones
- Prueba Inglés Ing ElectricidadDocumento6 páginasPrueba Inglés Ing ElectricidadRick CAún no hay calificaciones
- Informe Bomba EnsivalDocumento15 páginasInforme Bomba EnsivalRick CAún no hay calificaciones
- Cajetin y PlantillaDocumento10 páginasCajetin y PlantillaRick CAún no hay calificaciones
- Multirranger 100Documento268 páginasMultirranger 100Juan Argandoña CortesAún no hay calificaciones
- D.S. 40-69Documento7 páginasD.S. 40-69Luciano Ferrer Rodriguez ManrriquezAún no hay calificaciones
- El ADN OrganizacionalDocumento2 páginasEl ADN OrganizacionalEduardo Rafael Lopez LezamaAún no hay calificaciones
- Manual de ClearOSDocumento21 páginasManual de ClearOSLuis Gamaliel LinquiAún no hay calificaciones
- Matriz de Consistencia LógicaDocumento1 páginaMatriz de Consistencia LógicadujotovaAún no hay calificaciones
- Manual de Aplicaciones de Excel 2019 Con Macros y VBADocumento183 páginasManual de Aplicaciones de Excel 2019 Con Macros y VBAMoisés BeltránAún no hay calificaciones
- Evoluciondelsistemacelularhacia UMTSDocumento11 páginasEvoluciondelsistemacelularhacia UMTSJUCARLCAún no hay calificaciones
- Practica Ley de KirchoffDocumento14 páginasPractica Ley de KirchoffGabo M. Rivera100% (1)
- Casos de UsoDocumento22 páginasCasos de UsoMörä WïllAún no hay calificaciones
- Floor - 01 Pisar para CreerDocumento4 páginasFloor - 01 Pisar para CreercesarAún no hay calificaciones
- Deber de Conjuntos 2Documento2 páginasDeber de Conjuntos 2Tyrone SanchezAún no hay calificaciones
- Estudio de ConstructibilidadDocumento14 páginasEstudio de Constructibilidaddanilo portilloAún no hay calificaciones
- Taller Medios Editoriales - Clase 01Documento4 páginasTaller Medios Editoriales - Clase 01Miguel Cruz PazAún no hay calificaciones
- Preamplificador para Micrófono Con Reverb y DelayDocumento3 páginasPreamplificador para Micrófono Con Reverb y DelayAnderson Yorvyth Vera ManzanaresAún no hay calificaciones
- TEMA 4 - Ing SWDocumento11 páginasTEMA 4 - Ing SWAndrea Pascual0% (1)
- Manual Media System Seat Leon 2017Documento108 páginasManual Media System Seat Leon 2017elsenderista.galicia100% (1)
- Boletin - Control Automat.1993 2012Documento64 páginasBoletin - Control Automat.1993 2012Troy WeberAún no hay calificaciones
- Manual de Funciones y Competencias Laborales-Suboficial TICSDocumento2 páginasManual de Funciones y Competencias Laborales-Suboficial TICSRichard DelgadoAún no hay calificaciones
- Mapa Conceptual de MatematicaDocumento1 páginaMapa Conceptual de MatematicaEdgar EsvAún no hay calificaciones
- Evaluacion de Tecnologia 2018Documento13 páginasEvaluacion de Tecnologia 2018ANGIE MAXIEL LIZCANO CONTRERAS (:-)Aún no hay calificaciones
- Catalogo 3Documento23 páginasCatalogo 3Diego FrancoAún no hay calificaciones
- Consignas de Trabajo Clase 2Documento5 páginasConsignas de Trabajo Clase 2fulano detalAún no hay calificaciones
- SPC1 Ee615 2017 1Documento4 páginasSPC1 Ee615 2017 1Jhunior GuevaraAún no hay calificaciones
- Verbal Paronimas, Homonimas, Hiperónimos, HiponimosDocumento19 páginasVerbal Paronimas, Homonimas, Hiperónimos, HiponimosHarold Junnior Lujan FernadezAún no hay calificaciones
- Documento de Tics Pedro Reyes QuezadaDocumento7 páginasDocumento de Tics Pedro Reyes QuezadaPither QuezadaAún no hay calificaciones
- Prueba de SobrecorrienteDocumento25 páginasPrueba de SobrecorrienteRajdgurkAún no hay calificaciones
- Los 10 Mandamientos de Buenos Productos - The Startup - MediumDocumento16 páginasLos 10 Mandamientos de Buenos Productos - The Startup - MediumSofia Reyes AredoAún no hay calificaciones
- Ppda Electrocaquetá Def.Documento209 páginasPpda Electrocaquetá Def.Herminso Perez CuellarAún no hay calificaciones
- Tarea - 3 Algebra LinealDocumento13 páginasTarea - 3 Algebra Linealivan ceraAún no hay calificaciones
- Alg S3 2020iiDocumento10 páginasAlg S3 2020iiLeslyv GTAún no hay calificaciones