También podría gustarte
- Concepto de RoboticaDocumento26 páginasConcepto de Roboticabomaye10% (1)
- Control digital de orientación, posición y velocidad basado en movimientos de la cabeza para un prototipo de simulación de silla de ruedasDe EverandControl digital de orientación, posición y velocidad basado en movimientos de la cabeza para un prototipo de simulación de silla de ruedasAún no hay calificaciones
- Robotica IndustrialDocumento138 páginasRobotica IndustrialJeans Marco Nassi CernaAún no hay calificaciones
- Vibracion Libre de Un Sistema Torsional No AmortiguadoDocumento2 páginasVibracion Libre de Un Sistema Torsional No AmortiguadoIvan HdezAún no hay calificaciones
- Operaciones de verificación y control de productos mecánicos. FMEE0108De EverandOperaciones de verificación y control de productos mecánicos. FMEE0108Aún no hay calificaciones
- 42re TRANSMISION PDFDocumento368 páginas42re TRANSMISION PDFchikoo499100% (8)
- Marco Teórico Del Brazo RoboticoDocumento8 páginasMarco Teórico Del Brazo RoboticoOscarPattenden100% (1)
- Investigacion RoboticaDocumento9 páginasInvestigacion Roboticajjovany89Aún no hay calificaciones
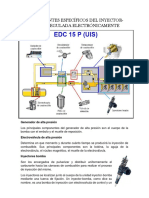
- Componentes de La Bomba Rotativa, Inyector-Bomba, Bomba-Tubería-InyectorDocumento15 páginasComponentes de La Bomba Rotativa, Inyector-Bomba, Bomba-Tubería-InyectorJosue CruzAún no hay calificaciones
- Brazo RobotDocumento11 páginasBrazo RobotCristian Coreno PadillaAún no hay calificaciones
- Fase 2 Trabajo ColaborativoDocumento28 páginasFase 2 Trabajo Colaborativocesar sanchezAún no hay calificaciones
- Proyecto MecanismosDocumento46 páginasProyecto MecanismosFernandoLopezAún no hay calificaciones
- Motores DC Y BRAZODocumento38 páginasMotores DC Y BRAZOOmar Milton Condori PeñaAún no hay calificaciones
- Útiles para Robots de OperaciónDocumento6 páginasÚtiles para Robots de OperaciónFlores Ruiz OdalisAún no hay calificaciones
- Reporte 1Documento12 páginasReporte 1Abigail LopezAún no hay calificaciones
- Hexapodo MecanicoDocumento14 páginasHexapodo MecanicoGonzalez Gutierrez Alan DanielAún no hay calificaciones
- Mecanismos de Transformación Del Movimiento en La MecánicaDocumento10 páginasMecanismos de Transformación Del Movimiento en La MecánicaGonzalo Ledezma DegraciaAún no hay calificaciones
- Reporte de Investigación de Los Elementos y Códigos de Programación de Un Robot IndustrialDocumento10 páginasReporte de Investigación de Los Elementos y Códigos de Programación de Un Robot IndustrialJuan Carlos Linares OrozcoAún no hay calificaciones
- Robotica Tarea 2 Aportes Significativos 123Documento25 páginasRobotica Tarea 2 Aportes Significativos 123Samuel GutierrezAún no hay calificaciones
- Brazo RoboticoDocumento4 páginasBrazo RoboticoJimmy GomezAún no hay calificaciones
- Marco Teórico: Según El Libro de Electrónica Industrial Timothy MaloneyDocumento4 páginasMarco Teórico: Según El Libro de Electrónica Industrial Timothy MaloneyFabiola LicerioAún no hay calificaciones
- Configuraciones de Los RobotsDocumento14 páginasConfiguraciones de Los RobotsAmauri MoránAún no hay calificaciones
- Robótica Tema 2Documento6 páginasRobótica Tema 2BraiiAún no hay calificaciones
- RobotsDocumento21 páginasRobotsMcPaul Dot100% (1)
- Brazo RobotDocumento37 páginasBrazo RobotJuan100% (1)
- Info de Exposición - Equipo 2Documento5 páginasInfo de Exposición - Equipo 2Santiago ContrerasAún no hay calificaciones
- Práctica 1. Tipos de MovimientoDocumento5 páginasPráctica 1. Tipos de MovimientoEduardo Fabian Zamudio CastroAún no hay calificaciones
- Unidad 1 Morfologia Del RobotDocumento33 páginasUnidad 1 Morfologia Del RobotFrancisco Armando Gamboa PinedaAún no hay calificaciones
- 1.a Fundamentos y Consideraciones Básicas de La RobóticaDocumento16 páginas1.a Fundamentos y Consideraciones Básicas de La Robóticajavier antonioAún no hay calificaciones
- Robotica IndustrialDocumento5 páginasRobotica IndustrialJunior HerreraAún no hay calificaciones
- Aplicaciones Robóticas en La IndustriaDocumento5 páginasAplicaciones Robóticas en La IndustriaJefferson ChipantizaAún no hay calificaciones
- Robot de AutobalanceoDocumento51 páginasRobot de AutobalanceoScott Melgarejo100% (1)
- Estructura de Un RobotDocumento15 páginasEstructura de Un Robotjuan pablo dominguez arellanoAún no hay calificaciones
- Actividad Complementaria #1 Elementos de Maquinas SenaDocumento9 páginasActividad Complementaria #1 Elementos de Maquinas SenaLaura Cristina Cisneros SampayoAún no hay calificaciones
- ManipuladoresDocumento8 páginasManipuladoresJavier Reséndiz PérezAún no hay calificaciones
- Reporte Robots BrazosDocumento8 páginasReporte Robots Brazoschucho benitezAún no hay calificaciones
- 2 Componentes de Un Robot IndustrialDocumento26 páginas2 Componentes de Un Robot IndustrialJorge L. Aguilar Martínez100% (1)
- Definición y Elementos BásicosDocumento11 páginasDefinición y Elementos BásicosAndy PolancoAún no hay calificaciones
- Complemetarias 1Documento4 páginasComplemetarias 1Jhon GuerreroAún no hay calificaciones
- Robot Da VinciDocumento6 páginasRobot Da VinciCarlos BermeoAún no hay calificaciones
- Aplicaciones de Los Sistemas MecanicosDocumento7 páginasAplicaciones de Los Sistemas MecanicosCarlos Trejo TrejoAún no hay calificaciones
- Mecanismo de Movimiento AlternativoDocumento20 páginasMecanismo de Movimiento AlternativoCristian Medina Herrera100% (1)
- Proyecto Con CimDocumento17 páginasProyecto Con CimCarlos Alejandro Galvez ChicchonAún no hay calificaciones
- Cuadroo Sinoptico RoboticaDocumento1 páginaCuadroo Sinoptico Roboticaleinad152414Aún no hay calificaciones
- Partes de Un RobotDocumento3 páginasPartes de Un RobotAna Maria Cruz RosasAún no hay calificaciones
- Robotica Producto 2 Cristian Ossiel Ortiz Quintana 18848Documento10 páginasRobotica Producto 2 Cristian Ossiel Ortiz Quintana 18848Cristian OrtizAún no hay calificaciones
- Tarea 2Documento9 páginasTarea 2Jose BatizAún no hay calificaciones
- Brazo Tipo CartesianoDocumento5 páginasBrazo Tipo CartesianoMich VellveAún no hay calificaciones
- Mecanismos RoboticosDocumento42 páginasMecanismos RoboticosrobertoAún no hay calificaciones
- Informe Del Robot Hexapodo FinalDocumento23 páginasInforme Del Robot Hexapodo FinalJocsmer SaldañaAún no hay calificaciones
- Tarea 1.Documento7 páginasTarea 1.Jesus Franco TorresAún no hay calificaciones
- Investigación Sobre FresadoraDocumento7 páginasInvestigación Sobre FresadoraAaron jimenezAún no hay calificaciones
- ROBOTICADocumento5 páginasROBOTICAvictoria stherAún no hay calificaciones
- Partes de Una Maquina Convencional y CNCDocumento9 páginasPartes de Una Maquina Convencional y CNCIsaac ArteagaAún no hay calificaciones
- Unidad 4Documento16 páginasUnidad 4Alex AscencioAún no hay calificaciones
- Mecanismo de Transmision y ReductoresDocumento9 páginasMecanismo de Transmision y ReductoresChristian FonsecaAún no hay calificaciones
- Laboratorio 1 de ProcesosDocumento10 páginasLaboratorio 1 de ProcesosManuel Antonio Araya ArayaAún no hay calificaciones
- Antep Roy EctoDocumento6 páginasAntep Roy EctoJOSUE ALFREDO MARTINEZ SERRANOAún no hay calificaciones
- VernierDocumento6 páginasVernierinddiAún no hay calificaciones
- Robot MovilDocumento5 páginasRobot MovilDeusAún no hay calificaciones
- Clasificacion de Robots y ArticulacionesDocumento9 páginasClasificacion de Robots y ArticulacionesRamses Carlos Soto AzurduyAún no hay calificaciones
- Anatomia Del RobotDocumento4 páginasAnatomia Del Robotvodkaytequila1100% (1)
- Unidad 5 RoboticaDocumento16 páginasUnidad 5 RoboticaLuis CastilloAún no hay calificaciones
- Problemas Turbomaquinas Clase 18Documento10 páginasProblemas Turbomaquinas Clase 18pabloAún no hay calificaciones
- Condiciones de EquilibrioDocumento3 páginasCondiciones de EquilibrioBrayan GuablochaAún no hay calificaciones
- Calculo Vectorial MaryDocumento176 páginasCalculo Vectorial MaryJose Raul Morales AguilarAún no hay calificaciones
- Electricidad y MagnetismoDocumento109 páginasElectricidad y MagnetismoAngél VargasAún no hay calificaciones
- Stokes y GausDocumento26 páginasStokes y GausBernardo VegaAún no hay calificaciones
- Tema 6 Flujo Ideal D. Páez: Mecánica de Fluidos IIDocumento71 páginasTema 6 Flujo Ideal D. Páez: Mecánica de Fluidos IIYusleiny' Guerrero D'Aún no hay calificaciones
- Gradient eDocumento35 páginasGradient eEstefany GomezAún no hay calificaciones
- Matematica IIIDocumento8 páginasMatematica IIIDarwin100% (1)
- A1 0851Documento5 páginasA1 0851Benjamín Medina Carrillo100% (1)
- 3 - Gradiente, Rotacional y DivergenciaDocumento18 páginas3 - Gradiente, Rotacional y DivergenciaJonathan Navarro OrtizAún no hay calificaciones
- Torque o Momento de Una FuerzaDocumento4 páginasTorque o Momento de Una FuerzaBrayan Ramos Fermin100% (1)
- Determinación de La Viscosidad de Un Fluido Por El Método Del Viscosimetro Rotacional de BrookfieldDocumento28 páginasDeterminación de La Viscosidad de Un Fluido Por El Método Del Viscosimetro Rotacional de Brookfieldevycz11100% (1)
- PRACTICA 4 TrianguloDocumento19 páginasPRACTICA 4 Trianguloleila loveAún no hay calificaciones
- Cálculo Multivariable - Aplicaciones en La Mecánica de Fluidos - Parte TeóricaDocumento2 páginasCálculo Multivariable - Aplicaciones en La Mecánica de Fluidos - Parte TeóricaRoberto OrnelasAún no hay calificaciones
- Guia Cálculo Vectorial FMM-412 2017 PDFDocumento4 páginasGuia Cálculo Vectorial FMM-412 2017 PDFNikolas Andres Jeldes SaraviaAún no hay calificaciones
- Problemas para El Examen Parcial 1: R. Tovar L. - UNMSM Física Matemática II - 2021-1Documento9 páginasProblemas para El Examen Parcial 1: R. Tovar L. - UNMSM Física Matemática II - 2021-1Francis HernándezAún no hay calificaciones
- 19 CamposDocumento44 páginas19 CamposENIC-AITCGAún no hay calificaciones
- FisicaDocumento10 páginasFisicaJuliana HerreraAún no hay calificaciones
- 1321 06 Cal VectorialDocumento7 páginas1321 06 Cal VectorialCarlosPerezAún no hay calificaciones
- MSDDocumento238 páginasMSDThomas0% (1)
- Guia3COE-Ley de GaussDocumento6 páginasGuia3COE-Ley de GaussBenjamin TorresAún no hay calificaciones
- Curso Turbomaquinas (Semana 3 y 4) - UNI, Perú PDFDocumento23 páginasCurso Turbomaquinas (Semana 3 y 4) - UNI, Perú PDFGustavo CuatzoAún no hay calificaciones
- SolucionarioDocumento430 páginasSolucionariorodolfo chapaAún no hay calificaciones
- Corrientes y Campos Variables Con El Tiempo en Los Conductores PDFDocumento18 páginasCorrientes y Campos Variables Con El Tiempo en Los Conductores PDFDebo LafuenteAún no hay calificaciones
- Informe Integrales de Superficie, Stokes & DivergenciaDocumento19 páginasInforme Integrales de Superficie, Stokes & DivergenciaHellen MincholaAún no hay calificaciones
- TPAG 2019-1 Tarea-1Documento2 páginasTPAG 2019-1 Tarea-1MiguelAngelVelasco100% (1)