También podría gustarte
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Unidad 1 Motor de Induccion y EspecialesDocumento46 páginasUnidad 1 Motor de Induccion y EspecialesGil Armando Lara Bante100% (1)
- Arranque Del Motor Con Devanados de AmortiguamientoDocumento6 páginasArranque Del Motor Con Devanados de AmortiguamientoMiguel Monroy100% (1)
- Ejercicios Cap 2Documento15 páginasEjercicios Cap 2Alisson Herrera100% (1)
- Cálculo Estructural Puente Acueducto Colgante L 10.00 M: 1. Parametros de DiseñoDocumento6 páginasCálculo Estructural Puente Acueducto Colgante L 10.00 M: 1. Parametros de DiseñoJose T. Guerrero100% (2)
- Circuito Semejante Del Motor de AsincronicoDocumento17 páginasCircuito Semejante Del Motor de Asincronicojomaz7112zajmAún no hay calificaciones
- MotorreductorDocumento22 páginasMotorreductorLucasAún no hay calificaciones
- Investigación Motores de Inducción y Especiales.Documento54 páginasInvestigación Motores de Inducción y Especiales.guada12345Aún no hay calificaciones
- Circuito Equivalente de Un Motor de InducciónDocumento16 páginasCircuito Equivalente de Un Motor de InducciónJave Zabdiel Hernandez Marin50% (2)
- s4.1 Motores EléctricosDocumento22 páginass4.1 Motores EléctricosPedro RodriguezAún no hay calificaciones
- Examen Parcial Maquinas Electricas 2Documento18 páginasExamen Parcial Maquinas Electricas 2RENZO JOEL PUMACALLAO ROLDANAún no hay calificaciones
- Motor de Inducción Con Rotor Jaula de ArdillaDocumento7 páginasMotor de Inducción Con Rotor Jaula de ArdillaMarco OrtuñoAún no hay calificaciones
- Prueba en Vacio y Rotor Bloqueado en Motores AsincronicosDocumento7 páginasPrueba en Vacio y Rotor Bloqueado en Motores AsincronicosAlexis Salvador Zambrano100% (3)
- Calculo de Perdidas Por FriccionDocumento7 páginasCalculo de Perdidas Por FriccionFenrry CamperosAún no hay calificaciones
- Investigacion DielectricosDocumento86 páginasInvestigacion DielectricosJaime ChiteAún no hay calificaciones
- Obtencion de Parametros Del Circuito Equivalente AproximadoDocumento5 páginasObtencion de Parametros Del Circuito Equivalente AproximadoNersy Dariana PerezAún no hay calificaciones
- Motor Trifásico AsíncronoDocumento18 páginasMotor Trifásico AsíncronoGerman Ehulech100% (1)
- Protección de Sistemas Eléctricos - Samuel Ramirez CastañoDocumento54 páginasProtección de Sistemas Eléctricos - Samuel Ramirez CastañoromerAún no hay calificaciones
- 03 Vibraciones Motores InducciónDocumento17 páginas03 Vibraciones Motores Inducciónallmcbeall18704Aún no hay calificaciones
- Resumen de Generadores SíncronosDocumento6 páginasResumen de Generadores Síncronosfany pmAún no hay calificaciones
- CARDANDocumento16 páginasCARDANHector Ariel HNAún no hay calificaciones
- Unidad 2 Circuito EquivalenteDocumento28 páginasUnidad 2 Circuito EquivalenteGuillermo SosaAún no hay calificaciones
- Reactancia de DispersiónDocumento8 páginasReactancia de DispersiónJohnatan HernándezAún no hay calificaciones
- Características Del Motor de Inducción Bajo Varias Condiciones de CargaDocumento43 páginasCaracterísticas Del Motor de Inducción Bajo Varias Condiciones de CargaJuan Carlos PozoAún no hay calificaciones
- Informe V - Maquinas Electricas II - Circuito Equivalente de La Maquina AsincronaDocumento11 páginasInforme V - Maquinas Electricas II - Circuito Equivalente de La Maquina AsincronaBrenda CastilloAún no hay calificaciones
- Informe IiDocumento10 páginasInforme IiYoshi TamashiroAún no hay calificaciones
- 2.5 Obtención de Parámetros Del Circuito Equivalente AproximadoDocumento5 páginas2.5 Obtención de Parámetros Del Circuito Equivalente AproximadoLuis Enrique Mendez Robles50% (2)
- Problemario Del Segundo ParcialDocumento19 páginasProblemario Del Segundo ParcialKristyCarrascoAún no hay calificaciones
- ReporteDocumento7 páginasReporteEdgar Eduardo Beltran HernandezAún no hay calificaciones
- Circuito Equivalente Monofásico Del Motor Trifásico de InducciónDocumento11 páginasCircuito Equivalente Monofásico Del Motor Trifásico de InducciónHelvin Loren Campos CastilloAún no hay calificaciones
- Rotor Jaula de Ardilla Doble Maquinas Electricas Ii EltDocumento5 páginasRotor Jaula de Ardilla Doble Maquinas Electricas Ii EltLAFUENTE TITO LEONELAún no hay calificaciones
- Actividad N07-Corriente de ArranqueDocumento9 páginasActividad N07-Corriente de ArranqueCristhian Rodríguez VegaAún no hay calificaciones
- Maquinas RotatoriasDocumento7 páginasMaquinas RotatoriasFranco SuazoAún no hay calificaciones
- La Máquina AsíncronaDocumento7 páginasLa Máquina Asíncronayeltsinmerma123Aún no hay calificaciones
- Labo5 MaquinasDocumento27 páginasLabo5 MaquinasGrecia Melissa Dionicio AntunezAún no hay calificaciones
- Tema 2 TeoriaDocumento31 páginasTema 2 TeoriaAndyAún no hay calificaciones
- Perdidas Secundarias y Potencia de La BombaDocumento12 páginasPerdidas Secundarias y Potencia de La BombamarioAún no hay calificaciones
- Resumen SCRDocumento11 páginasResumen SCRozielsAún no hay calificaciones
- 1P Preguntas Teoricas SEPIDocumento9 páginas1P Preguntas Teoricas SEPIMoises Uziel Marca AroAún no hay calificaciones
- Ecuaciones de Par - Potencia y Par-VelocidadDocumento14 páginasEcuaciones de Par - Potencia y Par-VelocidadAlex Luis Vasquez50% (2)
- Examen Final de Maquinas 2Documento23 páginasExamen Final de Maquinas 2Eberth Torres DiazAún no hay calificaciones
- Capitulo 4 Motores Ca TrifasicosDocumento67 páginasCapitulo 4 Motores Ca TrifasicosVenustiano Flores GarciaAún no hay calificaciones
- Obtención de ParametrosDocumento6 páginasObtención de ParametrosDavid PeñaAún no hay calificaciones
- Circuito Equivalente, Perdidas, Flujo de Potencia y Eficiencia de Las Máquinas Asíncronas o de Inducción TrifásicasDocumento46 páginasCircuito Equivalente, Perdidas, Flujo de Potencia y Eficiencia de Las Máquinas Asíncronas o de Inducción TrifásicasRubensaiD100% (1)
- Teor Cap 3 Induccion en RotorDocumento14 páginasTeor Cap 3 Induccion en RotorOliver Gálvez ZavaletaAún no hay calificaciones
- Circuito Equivalente Del Motor de InduccionDocumento5 páginasCircuito Equivalente Del Motor de InduccionluisproAún no hay calificaciones
- Transformadores PDFDocumento21 páginasTransformadores PDFGermanAún no hay calificaciones
- Motor de Rotor BobinadoDocumento12 páginasMotor de Rotor BobinadoJulii Martinez CastañoAún no hay calificaciones
- Maq2 Unidad2 Motor AsíncronoDocumento36 páginasMaq2 Unidad2 Motor AsíncronoCarlosAún no hay calificaciones
- Motor Induccion LaboratorioDocumento9 páginasMotor Induccion Laboratoriohernan666999100% (1)
- Calculo de TrafoDocumento10 páginasCalculo de TrafoPercy Flores AquiseAún no hay calificaciones
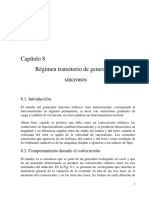
- Cap. 8 Régimen Transitorio TextoDocumento16 páginasCap. 8 Régimen Transitorio TextoErick MartinezAún no hay calificaciones
- Informe 6Documento5 páginasInforme 6Ivan Dario Lasso LeytonAún no hay calificaciones
- Taller Final de MáquinasDocumento7 páginasTaller Final de MáquinasCarlos TinocoAún no hay calificaciones
- Factores Que Intervienen en La FDocumento11 páginasFactores Que Intervienen en La FYulían Cruz MiguelAún no hay calificaciones
- Tiempo de Arranque de Un MotorDocumento4 páginasTiempo de Arranque de Un MotornelyealexandeaAún no hay calificaciones
- Circuito EquivalenteDocumento14 páginasCircuito EquivalenteHenry RodriguezAún no hay calificaciones
- Ejercicios sobre elasticidad y resistencia de materialesDe EverandEjercicios sobre elasticidad y resistencia de materialesAún no hay calificaciones
- Diseño Práctico De Cimentaciones Sujetas a Vibración Producida Por MaquinariaDe EverandDiseño Práctico De Cimentaciones Sujetas a Vibración Producida Por MaquinariaAún no hay calificaciones
- Recocido, Temple y Revenido de AcerosDocumento14 páginasRecocido, Temple y Revenido de AcerosJonathan Israel Aguilar ContrerasAún no hay calificaciones
- Circuito Bomba HidraulicaDocumento4 páginasCircuito Bomba HidraulicaJonathan Israel Aguilar ContrerasAún no hay calificaciones
- CAPACITORDocumento2 páginasCAPACITORJonathan Israel Aguilar ContrerasAún no hay calificaciones
- Tablas TermodinamicaDocumento36 páginasTablas TermodinamicaJonathan Israel Aguilar ContrerasAún no hay calificaciones
- Actividad 15 Motor DieselDocumento10 páginasActividad 15 Motor DieselJonathan Israel Aguilar ContrerasAún no hay calificaciones
- REDIMIDODocumento5 páginasREDIMIDOJonathan Israel Aguilar ContrerasAún no hay calificaciones
- EEE International 2019-11 Es ScreenDocumento292 páginasEEE International 2019-11 Es ScreenJonathan Israel Aguilar ContrerasAún no hay calificaciones
- Actividad 11 Calentadores SolaresDocumento14 páginasActividad 11 Calentadores SolaresJonathan Israel Aguilar ContrerasAún no hay calificaciones
- Actividad 9 Energia EolicaDocumento15 páginasActividad 9 Energia EolicaJonathan Israel Aguilar ContrerasAún no hay calificaciones
- Actividad 13 Celdas FotovoltaicasDocumento20 páginasActividad 13 Celdas FotovoltaicasJonathan Israel Aguilar ContrerasAún no hay calificaciones
- Actividad 6 Centrales Hidraulicas y MicrohidraulicasDocumento14 páginasActividad 6 Centrales Hidraulicas y MicrohidraulicasJonathan Israel Aguilar ContrerasAún no hay calificaciones
- Perdida de Cargas en BMDocumento18 páginasPerdida de Cargas en BMannAún no hay calificaciones
- 283 856 1 PBDocumento18 páginas283 856 1 PBDiana Maria Fernandez PerezAún no hay calificaciones
- ESET Smart Security 9Documento4 páginasESET Smart Security 9ERICK EDSON CRUZ QUISPEAún no hay calificaciones
- Examen FinalDocumento5 páginasExamen Finalluis escobedoAún no hay calificaciones
- Grupo 4 Entregable 2Documento9 páginasGrupo 4 Entregable 2Alessandra Esposito BarahonaAún no hay calificaciones
- Cuadernillo 2do 2016Documento34 páginasCuadernillo 2do 2016Nora B GarayoAún no hay calificaciones
- Bomba de Ariete Hidráulico - SolarpediaDocumento10 páginasBomba de Ariete Hidráulico - SolarpediaOscar CantuAún no hay calificaciones
- Currículum David Martínez Actualizado 2021 ProfesionalDocumento2 páginasCurrículum David Martínez Actualizado 2021 ProfesionaldavidAún no hay calificaciones
- Prodigioso Volcan Habla Claro La AdministracionDocumento66 páginasProdigioso Volcan Habla Claro La AdministracionNatxo VaronaAún no hay calificaciones
- Lógica y Métodos DiscretosDocumento8 páginasLógica y Métodos Discretosamcm25Aún no hay calificaciones
- Análisis Numérico - Lección Unidad 1 ResueltaDocumento3 páginasAnálisis Numérico - Lección Unidad 1 ResueltaKenneth MosqueraAún no hay calificaciones
- Mapa Conceptual de Analisis OrganizacionalDocumento1 páginaMapa Conceptual de Analisis OrganizacionalNathalia suarezAún no hay calificaciones
- Tarea 2 Algebra Juan AndradeDocumento15 páginasTarea 2 Algebra Juan AndradeCesar MuñozAún no hay calificaciones
- Tarea Mapa Conceptual Unidad 2Documento3 páginasTarea Mapa Conceptual Unidad 2Adriana MuñozAún no hay calificaciones
- Iram 210001-1Documento24 páginasIram 210001-1Sergio Fabian ValienteAún no hay calificaciones
- Rubrica de Evaluacion para Una Exposicion OralDocumento2 páginasRubrica de Evaluacion para Una Exposicion OralMario FuentesAún no hay calificaciones
- Vii Cadena de ValorDocumento1 páginaVii Cadena de ValorLuisAún no hay calificaciones
- Fallas en TornosDocumento2 páginasFallas en Tornosandy100% (1)
- Diagnostico, Estudio y Especificaciones Tecnicas Del ProyectoDocumento25 páginasDiagnostico, Estudio y Especificaciones Tecnicas Del Proyectopaola clarosAún no hay calificaciones
- Gestion de Recursos Humanos en La Ejecucion de Proyectos Viales: Caso Municipalidad Provincial de Melgar Año 2015Documento8 páginasGestion de Recursos Humanos en La Ejecucion de Proyectos Viales: Caso Municipalidad Provincial de Melgar Año 2015Carlos ZamalloaAún no hay calificaciones
- Ses. 10° - Campo SemanticoDocumento4 páginasSes. 10° - Campo SemanticoIngrid Paredes100% (3)
- Pantalla en Negro - Buscar Con GoogleDocumento1 páginaPantalla en Negro - Buscar Con GoogleAinaraAún no hay calificaciones
- Trabajo #2 FotografiaDocumento9 páginasTrabajo #2 FotografiaCarolina SznaiderAún no hay calificaciones
- Ficha 10 (2018) - Programación Modular (Python)Documento30 páginasFicha 10 (2018) - Programación Modular (Python)Juan Manuel CasellaAún no hay calificaciones
- Analisis Ético de Los Autos AutónomosDocumento2 páginasAnalisis Ético de Los Autos AutónomosAnthony GonzálezAún no hay calificaciones
- Entrega N°1Documento2 páginasEntrega N°1Nicolas KingAún no hay calificaciones
- Matemática Como Ciencia Del SaberDocumento10 páginasMatemática Como Ciencia Del SaberAnthony Camargo Rivas QuintanaAún no hay calificaciones
- Sesion N°4 2° Sec CytDocumento3 páginasSesion N°4 2° Sec CytJakelin Fernandez S.Aún no hay calificaciones
- Propósito:: Sesión de Aprendizaje N ° 1Documento6 páginasPropósito:: Sesión de Aprendizaje N ° 1Gabriel VelásquezAún no hay calificaciones