También podría gustarte
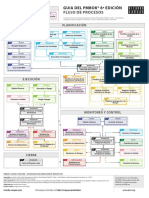
- Ricardo Vargas Simplified Pmbok Flow 6ed Color ES-A3Documento1 páginaRicardo Vargas Simplified Pmbok Flow 6ed Color ES-A3rmendoza85Aún no hay calificaciones
- Reporte Respuesta en El Tiempo de Sistemas de Primer y Segundo OrdenDocumento25 páginasReporte Respuesta en El Tiempo de Sistemas de Primer y Segundo OrdenfredirevAún no hay calificaciones
- Métodos Matriciales para ingenieros con MATLABDe EverandMétodos Matriciales para ingenieros con MATLABCalificación: 5 de 5 estrellas5/5 (1)
- Laboratorio 10Documento10 páginasLaboratorio 10Nhilson Denys Torres TorresAún no hay calificaciones
- Laboratorio 2Documento18 páginasLaboratorio 2Nhilson Denys Torres TorresAún no hay calificaciones
- Laboratorio 2Documento18 páginasLaboratorio 2Nhilson Denys Torres TorresAún no hay calificaciones
- Laboratorio 3Documento14 páginasLaboratorio 3Nhilson Denys Torres TorresAún no hay calificaciones
- Diagrama de Algoritmo Comp. de AdelantoDocumento9 páginasDiagrama de Algoritmo Comp. de AdelantoTobías Clark TorettoAún no hay calificaciones
- Laboratorio 4Documento9 páginasLaboratorio 4Nhilson Denys Torres TorresAún no hay calificaciones
- Practica 6Documento24 páginasPractica 6Eliseo Fustamante Blanco100% (1)
- Diseño de compensador de adelanto para sistema en lazo cerradoDocumento10 páginasDiseño de compensador de adelanto para sistema en lazo cerradoGenaro Ivan Chavez CamachoAún no hay calificaciones
- Tarea 2 Control Automatico FullDocumento33 páginasTarea 2 Control Automatico FullSergio Enrique Berrios GonzalezAún no hay calificaciones
- 03-Lab 3-GuideDocumento13 páginas03-Lab 3-GuideJosue MarshallAún no hay calificaciones
- 04-Análisis FrecuencialDocumento2 páginas04-Análisis Frecuencialpablo rodriguezAún no hay calificaciones
- Examen Parcial Control Digital 21-1Documento8 páginasExamen Parcial Control Digital 21-1Pio Wilde Quispe GarciaAún no hay calificaciones
- EP MT228 Control Digital 2021-1 Solucionario UNI FIMDocumento8 páginasEP MT228 Control Digital 2021-1 Solucionario UNI FIMRenzoAún no hay calificaciones
- Practica No 4 Diseño ControladoresDocumento9 páginasPractica No 4 Diseño ControladoresFaustoVinicioAcuñaCoelloAún no hay calificaciones
- Guia VI - Sistemas de Control IDocumento3 páginasGuia VI - Sistemas de Control IRaul CondorAún no hay calificaciones
- Tarea 3 Cesar Sanchez Grupo 67Documento18 páginasTarea 3 Cesar Sanchez Grupo 67Sebastián DazaAún no hay calificaciones
- Control de velocidad de motores DVDDocumento9 páginasControl de velocidad de motores DVDGademara100% (1)
- Actividad2Sec1 2021IDocumento5 páginasActividad2Sec1 2021IkarlaAún no hay calificaciones
- Laboratorio 5Documento10 páginasLaboratorio 5Nhilson Denys Torres TorresAún no hay calificaciones
- 5 Respuesta TransitoriaDocumento11 páginas5 Respuesta TransitoriaAmanda GarcíaAún no hay calificaciones
- Reporte 6Documento15 páginasReporte 6Miguel Aguilar GonzalezAún no hay calificaciones
- Funciones de TransferenciaDocumento23 páginasFunciones de Transferenciamaurocerex0% (1)
- Lab 6 Identificacion de ParametrosDocumento29 páginasLab 6 Identificacion de ParametrosCristian UrdaniviaAún no hay calificaciones
- Laboratorio 1Documento14 páginasLaboratorio 1Nhilson Denys Torres TorresAún no hay calificaciones
- Controlador PIDDocumento43 páginasControlador PIDPaulo TapiaAún no hay calificaciones
- 2 - Funcion de Transferencia1Documento8 páginas2 - Funcion de Transferencia1AlexWill PacherresAún no hay calificaciones
- Enunciados Parte 1Documento19 páginasEnunciados Parte 1alejososoAún no hay calificaciones
- Practica 2. Sistemas de ControlDocumento12 páginasPractica 2. Sistemas de ControlVictor Hugo HernándezAún no hay calificaciones
- Practica 4 RESPUESTA FRECUENCIALDocumento11 páginasPractica 4 RESPUESTA FRECUENCIALJose VizarretaAún no hay calificaciones
- Estabilidad BIBODocumento4 páginasEstabilidad BIBOManríquez Chávez Yasser Aben AmarAún no hay calificaciones
- SistemaSeguimientoIntegradorDocumento5 páginasSistemaSeguimientoIntegradorJefry CordovaAún no hay calificaciones
- Coleccion Problem As CA 3Documento134 páginasColeccion Problem As CA 3Cristian TarazonaAún no hay calificaciones
- Modelado de control analógico en SimulinkDocumento16 páginasModelado de control analógico en SimulinkJose BaqueroAún no hay calificaciones
- Labo3 ControlDocumento8 páginasLabo3 ControlLuis Bustamante GonzalezAún no hay calificaciones
- CompensadoresDocumento46 páginasCompensadoresWilliam AndresAún no hay calificaciones
- Diseño de Controladores y ObservadoresDocumento11 páginasDiseño de Controladores y ObservadoresOmar Gibrahin Hernandez UribeAún no hay calificaciones
- Practica 5Documento10 páginasPractica 5Martin Lopez ArteagaAún no hay calificaciones
- PRACTICA3YSMARTINEZDocumento16 páginasPRACTICA3YSMARTINEZYscarlys MartinezAún no hay calificaciones
- Informe 4 ControlDocumento3 páginasInforme 4 ControlNicolas EspitiaAún no hay calificaciones
- Lab 4Documento10 páginasLab 4Germain Keith Alvarez OlarteAún no hay calificaciones
- Practica 1Documento15 páginasPractica 1Alexys RodriguezAún no hay calificaciones
- Ejemplo de Practica Modelado de Variables de EstadoDocumento21 páginasEjemplo de Practica Modelado de Variables de EstadoMiguel Alex ReyesAún no hay calificaciones
- Control VTOL SISODocumento22 páginasControl VTOL SISOJason GreenAún no hay calificaciones
- Diagrama de Bode U-IV 23Documento24 páginasDiagrama de Bode U-IV 23SalimAún no hay calificaciones
- Introduccion PIDDocumento8 páginasIntroduccion PIDjesusdruizvAún no hay calificaciones
- El Lugar Geométrico de RaicesDocumento14 páginasEl Lugar Geométrico de RaicesLuis LAún no hay calificaciones
- Problemes1 21 22Documento2 páginasProblemes1 21 22albaAún no hay calificaciones
- Control voltaje paneles solaresDocumento6 páginasControl voltaje paneles solaresMishell Sanchez GuevaraAún no hay calificaciones
- Tutorial ProgramCCDocumento12 páginasTutorial ProgramCCDaiana PetrilloAún no hay calificaciones
- Respuesta Transitoria de SistemasDocumento28 páginasRespuesta Transitoria de SistemasKevin Cruz HernandezAún no hay calificaciones
- Examenes Rae 0708Documento40 páginasExamenes Rae 0708Milton Fonseca ZuritaAún no hay calificaciones
- Informe Practica 01Documento13 páginasInforme Practica 01Luis LAún no hay calificaciones
- Informe Practica 01Documento13 páginasInforme Practica 01Luis LAún no hay calificaciones
- Taller de Estudio 1Documento8 páginasTaller de Estudio 1juan pablo sandoval mejiaAún no hay calificaciones
- Universidad de La SerenaDocumento14 páginasUniversidad de La SerenaHECTOR JOVANNY HEREDIA ARANCIBIAAún no hay calificaciones
- Errores en Estado Estacionario Usando Matla1Documento10 páginasErrores en Estado Estacionario Usando Matla1Rodo CidAún no hay calificaciones
- Tarea 3 Cesar Sanchez Grupo 67Documento18 páginasTarea 3 Cesar Sanchez Grupo 67andresAún no hay calificaciones
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- Acciones y Alternativas de SolucionDocumento2 páginasAcciones y Alternativas de SolucionNhilson Denys Torres TorresAún no hay calificaciones
- Laboratorio 1Documento14 páginasLaboratorio 1Nhilson Denys Torres TorresAún no hay calificaciones
- Laboratorio 4Documento9 páginasLaboratorio 4Nhilson Denys Torres TorresAún no hay calificaciones
- SOL Practica 01 FIS 03 2019 01Documento6 páginasSOL Practica 01 FIS 03 2019 01Nhilson Denys Torres TorresAún no hay calificaciones
- El AutotransformadorDocumento17 páginasEl AutotransformadorNhilson Denys Torres TorresAún no hay calificaciones
- CONCLUSIONESDocumento1 páginaCONCLUSIONESNhilson Denys Torres TorresAún no hay calificaciones
- Ley de CoulombDocumento15 páginasLey de CoulombOlmer Vega CruzAún no hay calificaciones
- Arbol Causa Y EfectoDocumento2 páginasArbol Causa Y EfectoNhilson Denys Torres TorresAún no hay calificaciones
- TOBERASDocumento2 páginasTOBERASNhilson Denys Torres TorresAún no hay calificaciones
- Catalogo Cadenas Joresa 2010Documento68 páginasCatalogo Cadenas Joresa 2010Nhilson Denys Torres TorresAún no hay calificaciones
- 1 Simbolos Hidráulica PDFDocumento56 páginas1 Simbolos Hidráulica PDFjoseAún no hay calificaciones
- MBS 33MDocumento4 páginasMBS 33MNhilson Denys Torres TorresAún no hay calificaciones
- Presostato Tipo CS: Especificación TéchnicaDocumento8 páginasPresostato Tipo CS: Especificación TéchnicaNhilson Denys Torres TorresAún no hay calificaciones
- Pre CalDocumento2 páginasPre CalNhilson Denys Torres TorresAún no hay calificaciones
- Transmisor de Presión Tipo EMP 2: Pressure and Temperature Controls Especificación TécnicaDocumento8 páginasTransmisor de Presión Tipo EMP 2: Pressure and Temperature Controls Especificación TécnicaNhilson Denys Torres TorresAún no hay calificaciones
- Precal 8-10Documento8 páginasPrecal 8-10Nhilson Denys Torres TorresAún no hay calificaciones
- Vasquez Benavides José LeonardoDocumento128 páginasVasquez Benavides José LeonardoToño NavarreteAún no hay calificaciones
- BFP ValvulasDocumento8 páginasBFP ValvulasNhilson Denys Torres TorresAún no hay calificaciones
- Condensador y Presion de AceiteDocumento2 páginasCondensador y Presion de AceiteObi DoninelliAún no hay calificaciones
- Mantenimientos de CalidadDocumento2 páginasMantenimientos de CalidadWalter RuedaAún no hay calificaciones
- Solucionario Enlace QuímicoDocumento5 páginasSolucionario Enlace QuímicoCristian CastilloAún no hay calificaciones
- 386 Operacion y Mantenimiento de Calderas de Vapor Parte IDocumento75 páginas386 Operacion y Mantenimiento de Calderas de Vapor Parte INhilson Denys Torres TorresAún no hay calificaciones
- 1 Conceptos Básicos Del Mantenimiento PDFDocumento25 páginas1 Conceptos Básicos Del Mantenimiento PDFGianfranco1995Aún no hay calificaciones
- Mantenimiento BombasDocumento35 páginasMantenimiento Bombas121109Aún no hay calificaciones
- Vasquez Benavides José LeonardoDocumento128 páginasVasquez Benavides José LeonardoToño NavarreteAún no hay calificaciones
- Ethernet RockwellDocumento114 páginasEthernet RockwellCarlos Alberto Vaca SuarezAún no hay calificaciones
- Vasquez Benavides José LeonardoDocumento128 páginasVasquez Benavides José LeonardoToño NavarreteAún no hay calificaciones
- Rodamientos Rígidos de Bolas-6206-ZDocumento1 páginaRodamientos Rígidos de Bolas-6206-ZJuan Jam AguilarAún no hay calificaciones
- Programacion para PLC Allen Bradley de La Familia Logix 5000Documento10 páginasProgramacion para PLC Allen Bradley de La Familia Logix 5000Nhilson Denys Torres TorresAún no hay calificaciones
- 1.clasificación de Las ComputadorasDocumento2 páginas1.clasificación de Las ComputadorasmabelAún no hay calificaciones
- Configura IP y acceso remoto DVRDocumento31 páginasConfigura IP y acceso remoto DVRFabian CevallosAún no hay calificaciones
- Practicas Por UnidadDocumento5 páginasPracticas Por UnidadKatina BakerAún no hay calificaciones
- Lista de Cotejo para Autoevaluación DocenteDocumento1 páginaLista de Cotejo para Autoevaluación DocenteGuadalupe Cristina Murillo NavarreteAún no hay calificaciones
- Adquisición de útiles de oficina para proyectoDocumento1 páginaAdquisición de útiles de oficina para proyectojii ohooAún no hay calificaciones
- Windows Parte (Startup and Shutdown) .En - EsDocumento51 páginasWindows Parte (Startup and Shutdown) .En - EsCarit018Aún no hay calificaciones
- Red PresentacionDocumento77 páginasRed PresentacionricardoAún no hay calificaciones
- WixDocumento5 páginasWixByron CorralesAún no hay calificaciones
- APLICACIONESOFIMATICASDocumento3 páginasAPLICACIONESOFIMATICASjhsanche0% (1)
- Solicitud de Empleo LlenaDocumento3 páginasSolicitud de Empleo LlenaMaycol LozanoAún no hay calificaciones
- Central de Monitoreo Cic Con 6 Monitores Solar 8000i para NeonatosDocumento227 páginasCentral de Monitoreo Cic Con 6 Monitores Solar 8000i para Neonatosbrisa100% (1)
- Tinta EpsonDocumento2 páginasTinta EpsonEstuardo213Aún no hay calificaciones
- Matriz Fab Estrategias para La Eleccion de Un Empleador PotencialDocumento3 páginasMatriz Fab Estrategias para La Eleccion de Un Empleador PotencialNahiroby RamirezAún no hay calificaciones
- A2 - While vs. Do - While, ForeachDocumento5 páginasA2 - While vs. Do - While, ForeachPedriño GomezzAún no hay calificaciones
- Bocatoma de Fondo y AduccionDocumento1 páginaBocatoma de Fondo y AduccionMaría Bernal PáezAún no hay calificaciones
- Pic 16F886Documento7 páginasPic 16F886Jarot HackingAún no hay calificaciones
- Anexo N°02 - Plan de Requisitos de Calidad para SubcontratistasDocumento2 páginasAnexo N°02 - Plan de Requisitos de Calidad para SubcontratistasJose Guerrero100% (1)
- Diseño Mecatrónico IDocumento7 páginasDiseño Mecatrónico Idamejia14Aún no hay calificaciones
- SIMULINKDocumento21 páginasSIMULINKDaniel IturraldeAún no hay calificaciones
- Modulo II. Gestion Documental y Sistema SenecaDocumento15 páginasModulo II. Gestion Documental y Sistema SenecaPaquiAún no hay calificaciones
- Snagit Manual OficialDocumento11 páginasSnagit Manual Oficialapi-457710535Aún no hay calificaciones
- Impacto de Las Tic en La Contabilidad y FinanzasDocumento21 páginasImpacto de Las Tic en La Contabilidad y FinanzasCriss MbAún no hay calificaciones
- Digitaleslab (4 1)Documento28 páginasDigitaleslab (4 1)Luís David LDMAAún no hay calificaciones
- Rubrica Reducción de OrdenDocumento2 páginasRubrica Reducción de OrdenBrandin RoveloAún no hay calificaciones
- Submarino ProyectoDocumento12 páginasSubmarino ProyectoRoberto VicenteñoAún no hay calificaciones
- Cilindros Pared DelgadaDocumento44 páginasCilindros Pared DelgadaGustavo Moya AtahuichiAún no hay calificaciones
- OMRON NS DESIGNER Manual de FuncionamientoDocumento284 páginasOMRON NS DESIGNER Manual de FuncionamientoJuancho AstudilloAún no hay calificaciones
- Word PressDocumento11 páginasWord PressPromoción 34100% (2)
- Elementos Del Panel de ControlDocumento2 páginasElementos Del Panel de ControlOmar Y Danny Patiiño ToOrresAún no hay calificaciones