También podría gustarte
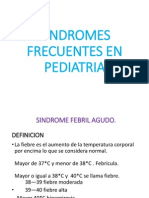
- Sindromes en Pediatría.Documento47 páginasSindromes en Pediatría.Loriflori50% (2)
- Big Data Eje 4Documento16 páginasBig Data Eje 4AlexanderBautistaMercadoAún no hay calificaciones
- Análisis de casos de éxito empresarial en gestión tecnológicaDocumento19 páginasAnálisis de casos de éxito empresarial en gestión tecnológicaRodriguez CkammýAún no hay calificaciones
- T1 Introd Ing Ind.Documento3 páginasT1 Introd Ing Ind.Jazmín BermejoAún no hay calificaciones
- Terraform: Curso práctico de formaciónDe EverandTerraform: Curso práctico de formaciónAún no hay calificaciones
- Estado Del Arte Robot EnvolvedoraDocumento34 páginasEstado Del Arte Robot Envolvedoraliceth perdomoAún no hay calificaciones
- Expo - Final FinalDocumento36 páginasExpo - Final FinalJohana Raquel Ramos LazaroAún no hay calificaciones
- Aplicaciones de RoboticaDocumento5 páginasAplicaciones de RoboticaDiego Sanchez AllendeAún no hay calificaciones
- Tipos de Robots IndustrialesDocumento14 páginasTipos de Robots Industrialesjuan mario diez herraAún no hay calificaciones
- Exposicion Produccion en MasaDocumento23 páginasExposicion Produccion en Masamaria jose guevara100% (1)
- Diseño de máquina selectora de frutas con sistema PLCDocumento7 páginasDiseño de máquina selectora de frutas con sistema PLCLaura Valentina LazoAún no hay calificaciones
- Nº 4 de Revista de RobotsDocumento32 páginasNº 4 de Revista de Robotspaul chavezAún no hay calificaciones
- Plantilla de Perfil de Proyecto de Grado 2020-Mi (Terminado)Documento25 páginasPlantilla de Perfil de Proyecto de Grado 2020-Mi (Terminado)Jhonatan LCAún no hay calificaciones
- Industria-5 0Documento3 páginasIndustria-5 0Cristian Machado KaderAún no hay calificaciones
- Nº 5 Revista de RobotsDocumento36 páginasNº 5 Revista de RobotsRUBENAún no hay calificaciones
- Plan de Negocio Energia SolarDocumento11 páginasPlan de Negocio Energia SolarYesid FabianAún no hay calificaciones
- EVIDENCIA 3 - Proyecto 8 - FLUJOGRAMA. DESCRIBIR EL FUNCIONAMIENTO DE UN PLAN DE PRODUCCIÓNDocumento3 páginasEVIDENCIA 3 - Proyecto 8 - FLUJOGRAMA. DESCRIBIR EL FUNCIONAMIENTO DE UN PLAN DE PRODUCCIÓNHector OspinaAún no hay calificaciones
- Fase 5 - Faider Felizzola - Grupo - 13Documento10 páginasFase 5 - Faider Felizzola - Grupo - 13Mario A. Alvarez RomeroAún no hay calificaciones
- Robot y ElectronicaDocumento15 páginasRobot y ElectronicaCarlos CastilloAún no hay calificaciones
- Unidad 7. La Producción de La EmpresaDocumento28 páginasUnidad 7. La Producción de La Empresaguillereina12Aún no hay calificaciones
- Eval Parcial de III 2020 10BDocumento6 páginasEval Parcial de III 2020 10BPaola Cardenas JddAún no hay calificaciones
- Simulación de Clasificación y Sellado en Proceso Industrial Con La Aplicación de Un Brazo Robótico en RobotStudio.Documento17 páginasSimulación de Clasificación y Sellado en Proceso Industrial Con La Aplicación de Un Brazo Robótico en RobotStudio.Laura Valentina Vargas RubianoAún no hay calificaciones
- Otoya Lavado Samuel Tarea de Manufactura 1Documento6 páginasOtoya Lavado Samuel Tarea de Manufactura 1SAMUEL OTOYA LAVADOAún no hay calificaciones
- Industria 5.0 y Cobots trabajando codo a codoDocumento10 páginasIndustria 5.0 y Cobots trabajando codo a codoJessica pino jimenezAún no hay calificaciones
- Presentación Producción en MasaDocumento11 páginasPresentación Producción en MasaEvelyn AvilesAún no hay calificaciones
- T.5Documento31 páginasT.5Antonio BernalAún no hay calificaciones
- Sistemas de producción tradicionales: clasificación y comparaciónDocumento3 páginasSistemas de producción tradicionales: clasificación y comparaciónULISES BRAYAN HERNANDEZ LUNAAún no hay calificaciones
- Identificar La Capacidad de Producción de Una EmpresaDocumento8 páginasIdentificar La Capacidad de Producción de Una EmpresaChristian MendozaAún no hay calificaciones
- Diseño plantas industrialesDocumento145 páginasDiseño plantas industrialesMaria Claudia Lopez SanabriaAún no hay calificaciones
- Sistemas de producción comparativos ITS ACAYUCANDocumento2 páginasSistemas de producción comparativos ITS ACAYUCANEmmanuel RSAún no hay calificaciones
- Presentación FinalDocumento22 páginasPresentación FinalLuis ParedesAún no hay calificaciones
- Trabajo GrupalDocumento9 páginasTrabajo GrupalNeiber Alarcon GuivarAún no hay calificaciones
- 4a5 IRLP KVSLDocumento4 páginas4a5 IRLP KVSLVanessa SanchezAún no hay calificaciones
- Matriz Colaborativa 1Documento20 páginasMatriz Colaborativa 1clara ramosAún no hay calificaciones
- Producción de carbonato de litioDocumento7 páginasProducción de carbonato de litiodarlingAún no hay calificaciones
- Semana 8 Evaluación de ProyectosDocumento18 páginasSemana 8 Evaluación de Proyectoscindysilvasanchez02Aún no hay calificaciones
- Evidencia 4 - Proyecto 8 - Taller - IDENTIFICAR LA CAPACIDAD DE PRODUCCIÓN DE UNA EMPRESA.Documento9 páginasEvidencia 4 - Proyecto 8 - Taller - IDENTIFICAR LA CAPACIDAD DE PRODUCCIÓN DE UNA EMPRESA.Hector OspinaAún no hay calificaciones
- Guía de Ejercicios 6134Documento10 páginasGuía de Ejercicios 6134Yohans Alyeris Delgado RodriguezAún no hay calificaciones
- Tarea 1 Produccion 1Documento20 páginasTarea 1 Produccion 1Hellen AlvarezAún no hay calificaciones
- Robot industrial: aplicaciones y oportunidades en el PerúDocumento43 páginasRobot industrial: aplicaciones y oportunidades en el PerúGian Karloo ApumaytaAún no hay calificaciones
- Armando Nahuelneri Tarea2Documento4 páginasArmando Nahuelneri Tarea2Armando Nahuelneri MuñozAún no hay calificaciones
- Tarea Semana 4Documento7 páginasTarea Semana 4darlingAún no hay calificaciones
- Aporte Entrega Semana 7Documento5 páginasAporte Entrega Semana 7yeila alejandra leon aguirreAún no hay calificaciones
- Optimización logística y mejora de procesosDocumento14 páginasOptimización logística y mejora de procesosjhon edisonAún no hay calificaciones
- Anexo 1. Herramienta Ficha TécnicaDocumento2 páginasAnexo 1. Herramienta Ficha TécnicaJuan Nicolas Moreno HigueraAún no hay calificaciones
- Wuolah Free TEMA 1 EmpresaDocumento9 páginasWuolah Free TEMA 1 EmpresaAchraf AKAún no hay calificaciones
- Fase1 EdgarSaavedraDocumento8 páginasFase1 EdgarSaavedrafurymenlove1Aún no hay calificaciones
- Informe TecnicoDocumento7 páginasInforme TecnicoRamiro C. ÁlvarezAún no hay calificaciones
- Ec2 TallerDocumento19 páginasEc2 Tallerkevin ArrascoAún no hay calificaciones
- Nº 10 de Revista de RobotsDocumento82 páginasNº 10 de Revista de Robotspaul chavezAún no hay calificaciones
- Visita Técnica LidaDocumento6 páginasVisita Técnica LidaBraian Alejandro Mendez PerezAún no hay calificaciones
- Actividad 1-Celdas de ManufacturaDocumento5 páginasActividad 1-Celdas de Manufacturacarol0% (1)
- Guic06 Guía Entrega de Productos en Formato Digital Proyectos Infraestructura de Sistemas de Movilidad y Espacio Público V 2Documento41 páginasGuic06 Guía Entrega de Productos en Formato Digital Proyectos Infraestructura de Sistemas de Movilidad y Espacio Público V 2Cristian TovarAún no hay calificaciones
- Prototipo de Maquina Empacadora y Selladora de GranosDocumento7 páginasPrototipo de Maquina Empacadora y Selladora de Granossergiovillamizar01Aún no hay calificaciones
- SistemasProducciónJITDocumento56 páginasSistemasProducciónJITElízabeth BlasAún no hay calificaciones
- Propuesta de Automatización en Bodega de Producto Terminado en Industria Manufacturera de Productos de Higiene PersonalDocumento6 páginasPropuesta de Automatización en Bodega de Producto Terminado en Industria Manufacturera de Productos de Higiene PersonalVictor SalayaAún no hay calificaciones
- Plantilla DMPDocumento31 páginasPlantilla DMPJesus AmbrosioAún no hay calificaciones
- U2a2 Nancy.y.nava Tec - Enf.admon - ContDocumento4 páginasU2a2 Nancy.y.nava Tec - Enf.admon - ContNany VargasAún no hay calificaciones
- Administracion de La Produccion Adm-340 Trabajo de SemestreDocumento20 páginasAdministracion de La Produccion Adm-340 Trabajo de SemestreleonorAún no hay calificaciones
- Actividad E01 - U2 - Conceptos Cobots.Documento11 páginasActividad E01 - U2 - Conceptos Cobots.AngelAún no hay calificaciones
- Informe 1Documento4 páginasInforme 1Luis Alfonso Ramos BolañoAún no hay calificaciones
- Estado Del Arte Banco de Prueba Variacion Del Centro de Masa de BicicletaDocumento36 páginasEstado Del Arte Banco de Prueba Variacion Del Centro de Masa de Bicicletaliceth perdomoAún no hay calificaciones
- Memorias de CalculoDocumento84 páginasMemorias de Calculoliceth perdomoAún no hay calificaciones
- Informe 1 Luis MancholaDocumento8 páginasInforme 1 Luis Mancholaliceth perdomoAún no hay calificaciones
- FOTOMETRIA PaicolDocumento663 páginasFOTOMETRIA Paicolliceth perdomoAún no hay calificaciones
- 1 s2.0 S1665920116300530 MainDocumento9 páginas1 s2.0 S1665920116300530 Mainliceth perdomoAún no hay calificaciones
- 0124 8170 Cein 28 01 00117Documento18 páginas0124 8170 Cein 28 01 00117liceth perdomoAún no hay calificaciones
- Articulo de Investigacion Jhon Ardila Electiva 2.Documento4 páginasArticulo de Investigacion Jhon Ardila Electiva 2.liceth perdomoAún no hay calificaciones
- Proyecto Placa HuellaDocumento2 páginasProyecto Placa Huellaliceth perdomoAún no hay calificaciones
- Trabajo de Consultoria y Propuesta Economica Ley y EticaDocumento7 páginasTrabajo de Consultoria y Propuesta Economica Ley y Eticaliceth perdomoAún no hay calificaciones
- Cartera Talud Natural Felipe Rivas...Documento3 páginasCartera Talud Natural Felipe Rivas...liceth perdomoAún no hay calificaciones
- Convocatoría 002. Calculo de Presupuesto - InterventoriaDocumento6 páginasConvocatoría 002. Calculo de Presupuesto - Interventorialiceth perdomoAún no hay calificaciones
- Inventario de señalización vial en comunas de Campoalegre HuilaDocumento5 páginasInventario de señalización vial en comunas de Campoalegre Huilaliceth perdomoAún no hay calificaciones
- Articulo Electiva 2 Felipe RivasDocumento3 páginasArticulo Electiva 2 Felipe Rivasliceth perdomoAún no hay calificaciones
- Proyecto Placa HuellaDocumento2 páginasProyecto Placa Huellaliceth perdomoAún no hay calificaciones
- Tarea 1-DinamicoDocumento1 páginaTarea 1-Dinamicoliceth perdomoAún no hay calificaciones
- AsistenciaDocumento5 páginasAsistencialiceth perdomoAún no hay calificaciones
- Calculos AcueductosDocumento41 páginasCalculos Acueductosliceth perdomoAún no hay calificaciones
- PogresoDocumento1 páginaPogresoliceth perdomoAún no hay calificaciones
- Avance Del 2 CapituloDocumento1 páginaAvance Del 2 Capituloliceth perdomoAún no hay calificaciones
- AsistenciaDocumento5 páginasAsistencialiceth perdomoAún no hay calificaciones
- Reciclando Ando 2019Documento11 páginasReciclando Ando 2019liceth perdomoAún no hay calificaciones
- Tabla de Retencion Fuente 2019Documento3 páginasTabla de Retencion Fuente 2019nancyAún no hay calificaciones
- Formato Kardex1Documento2 páginasFormato Kardex1liceth perdomoAún no hay calificaciones
- Elemento Estructural PDFDocumento29 páginasElemento Estructural PDFEsteban Vargas0% (1)
- Fase 3 - 23Documento6 páginasFase 3 - 23karen daniela morales mosqueraAún no hay calificaciones
- El Adjetivo Determinativo para Quinto Grado de PrimariaDocumento4 páginasEl Adjetivo Determinativo para Quinto Grado de PrimariaCinthya De La Cruz Gastelo100% (2)
- wuolah-free-TEMAS 6-9 BINOCULARDocumento36 páginaswuolah-free-TEMAS 6-9 BINOCULAREvelyn SepulvedaAún no hay calificaciones
- Cariología GlosarioDocumento4 páginasCariología GlosarioKaren Paola Intriago ArteagaAún no hay calificaciones
- Recibos WU 04082022 20220804137722DI5QSVDocumento1 páginaRecibos WU 04082022 20220804137722DI5QSVLeira NogueraAún no hay calificaciones
- xxxCONTRATO DE PRESTACIÓN DE SERVICIOS PROFESIONALES INDEPENDIENTES.......Documento2 páginasxxxCONTRATO DE PRESTACIÓN DE SERVICIOS PROFESIONALES INDEPENDIENTES.......Felipe AlmanzaAún no hay calificaciones
- Diagrama ABCDocumento6 páginasDiagrama ABCRicardo MendezAún no hay calificaciones
- Preparador Clases Javier 1bDocumento231 páginasPreparador Clases Javier 1bKawir ArgumedoAún no hay calificaciones
- 03 Modelo de Maquina SincronicaDocumento26 páginas03 Modelo de Maquina SincronicaAdra RicardoAún no hay calificaciones
- Remuneraciones Servidores Con Nombramiento 2011Documento9 páginasRemuneraciones Servidores Con Nombramiento 2011Gobierno Provincial de LojaAún no hay calificaciones
- Historia ClinicaDocumento58 páginasHistoria Clinicakarla hernandez bautistaAún no hay calificaciones
- Mi Cocina Escoffier 1 Tomo Pluton Ediciones - CompressDocumento4 páginasMi Cocina Escoffier 1 Tomo Pluton Ediciones - CompressFamilia Peñuela RodriguezAún no hay calificaciones
- 1.3 EnsayoDocumento3 páginas1.3 EnsayoDavid CybridAún no hay calificaciones
- Guia ContabilidadDocumento5 páginasGuia ContabilidadJorge VazquezAún no hay calificaciones
- Codigo WinklerDocumento9 páginasCodigo WinklerCarlos Santibañez100% (1)
- Deloitte - Servicios Fiscales ZOLIDocumento7 páginasDeloitte - Servicios Fiscales ZOLIfranklin.soto100% (1)
- El Contexto Educativo en La Investigación Sobre La Actuación Del ProfesorDocumento7 páginasEl Contexto Educativo en La Investigación Sobre La Actuación Del ProfesorYUFEBAAún no hay calificaciones
- Tipos de conflictos comunitarios y sus causasDocumento3 páginasTipos de conflictos comunitarios y sus causasJohan Gonzales100% (2)
- La LopnaDocumento7 páginasLa LopnaOzwaldo Rioz V'zAún no hay calificaciones
- Primer Parcial SegundoDocumento10 páginasPrimer Parcial SegundoMirella Cun MoralesAún no hay calificaciones
- PRS Avance Admi N 2Documento16 páginasPRS Avance Admi N 2Francis NoriegaAún no hay calificaciones
- Presupuestadas: Cif AplicadosDocumento6 páginasPresupuestadas: Cif Aplicadosbrenda katerine gaitan gutierrezAún no hay calificaciones
- Unidad 1 Estructura Del Cuerpo HumanoDocumento125 páginasUnidad 1 Estructura Del Cuerpo HumanoLida Yaneth Quimbayo VargasAún no hay calificaciones
- Eduardo Posada CarbóDocumento1 páginaEduardo Posada CarbóMelany Gil LezamaAún no hay calificaciones
- CAS PersonasDocumento13 páginasCAS PersonasArnold Ramirez Cuadros100% (2)
- Pruebas Antigenas - 30.01.2021Documento6 páginasPruebas Antigenas - 30.01.2021JUAN DAVID HUANCA MAMANIAún no hay calificaciones
- Redes convergentes: router, switch, hub y VPNDocumento18 páginasRedes convergentes: router, switch, hub y VPNAna Daniela MartínezAún no hay calificaciones
- SESION RADIO 5°y 6° DIADocumento14 páginasSESION RADIO 5°y 6° DIAModesto ChavezAún no hay calificaciones