También podría gustarte
- Informe 2 Extracción de Cafeína en Té NegroDocumento8 páginasInforme 2 Extracción de Cafeína en Té NegroJuan Manuel ÁlvarezAún no hay calificaciones
- Diseño de Compensadores en Bode Ad y Atr Con EjemploDocumento6 páginasDiseño de Compensadores en Bode Ad y Atr Con EjemploDav1t1Aún no hay calificaciones
- Taller Pronósticos de La DemandaDocumento2 páginasTaller Pronósticos de La DemandaJairo SierraAún no hay calificaciones
- EGPR - 016 - 06 - Plan de Gestión de Cambios EntregableDocumento5 páginasEGPR - 016 - 06 - Plan de Gestión de Cambios EntregableHeidy MilenaAún no hay calificaciones
- MolaridadDocumento5 páginasMolaridadGabriel fernandez perezAún no hay calificaciones
- Valvula de Globo #300Documento3 páginasValvula de Globo #300Fa ChAún no hay calificaciones
- Sara María Larrabure, Escritura de Mujer en La Narrativa de Los Años 50' - Sonia Luz CarrilloDocumento7 páginasSara María Larrabure, Escritura de Mujer en La Narrativa de Los Años 50' - Sonia Luz CarrilloJean Paul100% (1)
- SESION "Collage de Las Costumbres y Tradiciones Peruanas"Documento7 páginasSESION "Collage de Las Costumbres y Tradiciones Peruanas"Johana100% (2)
- Null Rev2Documento16 páginasNull Rev2Josué RamírezAún no hay calificaciones
- Laboratorio de Compensadores en Adelanto y AtrasoDocumento12 páginasLaboratorio de Compensadores en Adelanto y AtrasoCristianMartinezAún no hay calificaciones
- Compensación Utilizando Métodos de Respuesta en FrecuenciaDocumento12 páginasCompensación Utilizando Métodos de Respuesta en FrecuenciaMatias Gabriel TurinAún no hay calificaciones
- Practica 7Documento8 páginasPractica 7Aerolift RentalsAún no hay calificaciones
- Practica 6Documento16 páginasPractica 6Kyoki DriftersAún no hay calificaciones
- Practica 6Documento15 páginasPractica 6Aerolift RentalsAún no hay calificaciones
- Reporte de Practica 6Documento9 páginasReporte de Practica 6Marvin Soria TlazaloAún no hay calificaciones
- Semana 12Documento76 páginasSemana 12Christian Calderón VilelaAún no hay calificaciones
- Practica#11 Lab de Ing de ControlDocumento4 páginasPractica#11 Lab de Ing de ControlCesar Arath Tamez MtzAún no hay calificaciones
- Diagrama de Bode Grupo7Documento13 páginasDiagrama de Bode Grupo7ANDRES WLADIMIR NARANJO PEREZAún no hay calificaciones
- Tarea SemanaDocumento10 páginasTarea SemanaMarbella HernándezAún no hay calificaciones
- Diseño de Compensadores en Bode Ad y Atr Con EjemploDocumento6 páginasDiseño de Compensadores en Bode Ad y Atr Con EjemploAdrian PeñalozaAún no hay calificaciones
- Prácticas de Laboratorio: Instituto Tecnológico de Veracruz Ingeniería Eléctrica - ElectrónicaDocumento9 páginasPrácticas de Laboratorio: Instituto Tecnológico de Veracruz Ingeniería Eléctrica - ElectrónicaJared BravoAún no hay calificaciones
- InvestigacionUnidad2 Control II OPADocumento12 páginasInvestigacionUnidad2 Control II OPAOsbaldo PulidoAún no hay calificaciones
- P3 ControlDocumento15 páginasP3 ControlJared BravoAún no hay calificaciones
- Diagrama BodeDocumento13 páginasDiagrama BodeJota PiscoyaAún no hay calificaciones
- Universidad Autónoma de Nuevo León Facultad de Ingeniería Mécanica y EléctricaDocumento13 páginasUniversidad Autónoma de Nuevo León Facultad de Ingeniería Mécanica y EléctricaThe YisusAún no hay calificaciones
- Compensación de Adelanto, Atraso y AmbasDocumento44 páginasCompensación de Adelanto, Atraso y AmbasAndres SilvaAún no hay calificaciones
- Control1 Lag LeadDocumento12 páginasControl1 Lag LeadYovani ZuñigaAún no hay calificaciones
- Diseño Por Retardo de Fase Utilizando El Diagrama de BodeDocumento30 páginasDiseño Por Retardo de Fase Utilizando El Diagrama de BodeVikthor Lopez100% (1)
- Compensadores (Frecuencia)Documento32 páginasCompensadores (Frecuencia)Anonymous 5eGrLHBAún no hay calificaciones
- Paso 2 25Documento15 páginasPaso 2 25raulokoAún no hay calificaciones
- Laboratorio de Ingeniería de Control: Universidad Autónoma de Nuevo León Facultad de Ingeniería Mecánica y EléctricaDocumento30 páginasLaboratorio de Ingeniería de Control: Universidad Autónoma de Nuevo León Facultad de Ingeniería Mecánica y EléctricaClaudio MartinezAún no hay calificaciones
- Primera EvaluaciónDocumento7 páginasPrimera EvaluaciónMonica MolinaAún no hay calificaciones
- Unidad 3 BDocumento8 páginasUnidad 3 BJP GarcíaAún no hay calificaciones
- Universidad Autónoma de Nuevo LeónDocumento6 páginasUniversidad Autónoma de Nuevo LeónJavier SanchezAún no hay calificaciones
- Practica 11 - Analisis de Sistemas de Control Por Respuesta en FrecuenciaDocumento6 páginasPractica 11 - Analisis de Sistemas de Control Por Respuesta en Frecuenciamanuu.roblesAún no hay calificaciones
- Informe 3 Calculo DiferencialDocumento7 páginasInforme 3 Calculo DiferencialPaulina BoneAún no hay calificaciones
- Compensadores Actividad FinalDocumento6 páginasCompensadores Actividad FinalalexanderAún no hay calificaciones
- CompensacionDocumento154 páginasCompensacionMiwa IchigenAún no hay calificaciones
- Procesamiento - Exposición TransformadasDocumento30 páginasProcesamiento - Exposición TransformadasYair CootAún no hay calificaciones
- Rutinas Punto FlotanteDocumento5 páginasRutinas Punto Flotantealvaldez035981Aún no hay calificaciones
- Compensador de Adelanto y AtrasoDocumento9 páginasCompensador de Adelanto y AtrasoKhalil Mckenzie100% (1)
- Laboratorio 4 - Diagramas de BodeDocumento10 páginasLaboratorio 4 - Diagramas de Bodemaria_carbajal_390% (1)
- Taller 3. Amplificador de RFDocumento7 páginasTaller 3. Amplificador de RFRamiro Avalos VegaAún no hay calificaciones
- Técnica de Compensación - 113326Documento6 páginasTécnica de Compensación - 113326David Jose GodoyAún no hay calificaciones
- Análisis y Diseño de Compensadores en La FrecuenciaDocumento6 páginasAnálisis y Diseño de Compensadores en La FrecuenciaMexahopAún no hay calificaciones
- MetodofibonacciDocumento8 páginasMetodofibonacciArelicoronabernabeAún no hay calificaciones
- 1er Taller Grupal de Estadistica 1-2021Documento2 páginas1er Taller Grupal de Estadistica 1-2021Luis RojasAún no hay calificaciones
- Capitulo 5Documento27 páginasCapitulo 5jorge quintero galindoAún no hay calificaciones
- Lab Ic P9 Eq2 403 A22Documento30 páginasLab Ic P9 Eq2 403 A22Claudio MartinezAún no hay calificaciones
- Practica 1BFBS-SCEDocumento8 páginasPractica 1BFBS-SCEBrandon Bautista SánchezAún no hay calificaciones
- TCONTROL Ejercicios Ut3a 1Documento7 páginasTCONTROL Ejercicios Ut3a 1omahvalAún no hay calificaciones
- Diseño de Controlador Con BODEDocumento12 páginasDiseño de Controlador Con BODEdavid hidalgoAún no hay calificaciones
- Control Lab6Documento18 páginasControl Lab6Juana Ramirez BlancoAún no hay calificaciones
- Procedimiento de Diseño en El Plano WDocumento1 páginaProcedimiento de Diseño en El Plano WAriel Paz E SilvaAún no hay calificaciones
- Laboratorio1 Creación de Diagramas de Flujo-Ray Arnao Soto BucamaDocumento17 páginasLaboratorio1 Creación de Diagramas de Flujo-Ray Arnao Soto BucamaDiego Tito ParionaAún no hay calificaciones
- Reporte P7 John PozoDocumento12 páginasReporte P7 John PozoJohn Andrés Pozo VillónAún no hay calificaciones
- Contabilidad EjemploDocumento4 páginasContabilidad EjemploVero RgAún no hay calificaciones
- Procedimiento de Balanceo Del FWD A 1 GHZ SplitN 18 DB TiltDocumento12 páginasProcedimiento de Balanceo Del FWD A 1 GHZ SplitN 18 DB TiltMickynegrito Terceros100% (1)
- Control Automatico Compensadores Adelanto y AtrasoDocumento57 páginasControl Automatico Compensadores Adelanto y AtrasoAnonymous 7rbDr3bI50% (2)
- Respuesta en FrecuenciaDocumento32 páginasRespuesta en FrecuenciabrunorafoAún no hay calificaciones
- Examen Unidad 2 de Control IIDocumento2 páginasExamen Unidad 2 de Control IIEMMIT ALDAIR SILVA TOMEAún no hay calificaciones
- Lab Respuesta en FrecuenciaDocumento14 páginasLab Respuesta en FrecuenciaJuan David Rozo HernandezAún no hay calificaciones
- Anexo 1 Ejercicios y Formato Pre TareaDocumento8 páginasAnexo 1 Ejercicios y Formato Pre TareaMayerly Yiceth SiachoqueAún no hay calificaciones
- Laboratori N°6 Sintonizacion Por Lazo CerradoDocumento20 páginasLaboratori N°6 Sintonizacion Por Lazo CerradoAlberto Miguel Quispe LimaAún no hay calificaciones
- Banco de filtros: Información sobre las técnicas del banco de filtros de Computer VisionDe EverandBanco de filtros: Información sobre las técnicas del banco de filtros de Computer VisionAún no hay calificaciones
- Método de ajuste de nivel: Avances en la visión por computadora, exploración del método de conjunto de nivelesDe EverandMétodo de ajuste de nivel: Avances en la visión por computadora, exploración del método de conjunto de nivelesAún no hay calificaciones
- Representación de volumen: Explorando el realismo visual en la visión por computadoraDe EverandRepresentación de volumen: Explorando el realismo visual en la visión por computadoraAún no hay calificaciones
- RUC: 20297986130 Factura Electrónica Nro. F015-00002989: Emitido A Través deDocumento1 páginaRUC: 20297986130 Factura Electrónica Nro. F015-00002989: Emitido A Través decarmen rosa rojas palaciosAún no hay calificaciones
- Factores de Riesgo Trabajo FinalDocumento14 páginasFactores de Riesgo Trabajo FinalFrancisca MendozaAún no hay calificaciones
- Historia de La BlusaDocumento10 páginasHistoria de La BlusagabielaaragundicomAún no hay calificaciones
- El Concepto Del Lenguaje. BelinchónDocumento4 páginasEl Concepto Del Lenguaje. BelinchónJuan David Diaz PaniaguaAún no hay calificaciones
- Cuaderno-De-Trabajo-Del-EstudianteDocumento169 páginasCuaderno-De-Trabajo-Del-EstudianteFERNANDO REYES FUENTESAún no hay calificaciones
- Cordillerea Escalera PDFDocumento114 páginasCordillerea Escalera PDFSthefany Robledo MerinoAún no hay calificaciones
- Macroeconomia Iii 2 Bim Tablet 1101467Documento9 páginasMacroeconomia Iii 2 Bim Tablet 1101467Juan RealAún no hay calificaciones
- Elimina El Enunciado Que Se Aleja de Las DemásDocumento3 páginasElimina El Enunciado Que Se Aleja de Las DemásGlaiber Ancalla FloresAún no hay calificaciones
- Guia Nivelacion Nº1 MAT 8voDocumento6 páginasGuia Nivelacion Nº1 MAT 8voCynthia LepeAún no hay calificaciones
- Manual AmbientalDocumento43 páginasManual AmbientalDarixa Zapata BerrúAún no hay calificaciones
- Tesis DoctoralDocumento400 páginasTesis DoctoralEsteban30Aún no hay calificaciones
- OndasDocumento19 páginasOndasTatianaAún no hay calificaciones
- Anexo 2 Recopilacion de Actividades LenguajeDocumento37 páginasAnexo 2 Recopilacion de Actividades LenguajeGenesis BarriosAún no hay calificaciones
- 1° SESION 3°A Desarrollo PersonalDocumento2 páginas1° SESION 3°A Desarrollo PersonalGirese Valencia Parraga100% (1)
- Proyecto Cap 2Documento3 páginasProyecto Cap 2Luis FernándezAún no hay calificaciones
- Proyecto Restaurant Final ENFOQUES1Documento63 páginasProyecto Restaurant Final ENFOQUES1Angel Sebastian Coronado BaezAún no hay calificaciones
- Modelos de Economías SosteniblesDocumento1 páginaModelos de Economías SosteniblesHilary Salazar RodriguezAún no hay calificaciones
- L01 - Transformada de FourierDocumento14 páginasL01 - Transformada de FourierJilmar Danilo Nunez ZegarraAún no hay calificaciones
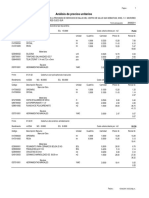
- Analisis de Precios Unitarios de Un Centro de SaludDocumento34 páginasAnalisis de Precios Unitarios de Un Centro de SaludManuel Sardon Morveli100% (1)
- Winfast Mcp61pm2maDocumento3 páginasWinfast Mcp61pm2mamaleficus969Aún no hay calificaciones
- Sesion N 8Documento8 páginasSesion N 8Amilcar cuntoAún no hay calificaciones
- Método de AnálisisDocumento11 páginasMétodo de AnálisisDaniel RodriguezAún no hay calificaciones
- Equipo 5 - Ev4 - LmeDocumento4 páginasEquipo 5 - Ev4 - LmeMauri ValeroAún no hay calificaciones