También podría gustarte
- Ejercicios Resueltos de Potencia I Parte 2Documento38 páginasEjercicios Resueltos de Potencia I Parte 2Ricardo Alvarez Tejeda67% (3)
- Thermo CRS 5 CatalysDocumento49 páginasThermo CRS 5 CatalysFrancisco Gallegos RogelioAún no hay calificaciones
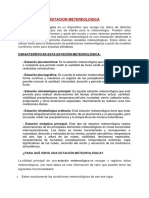
- Estación MeteorológicaDocumento5 páginasEstación MeteorológicaEstefani Espinoza Valerio100% (1)
- 5 - Logica CableadaDocumento25 páginas5 - Logica CableadaCarlos Eduardo CcapaAún no hay calificaciones
- Gustavo Bernard Semana8pyniiDocumento4 páginasGustavo Bernard Semana8pyniigustavoAún no hay calificaciones
- Estandar de Ford Manual FanucDocumento114 páginasEstandar de Ford Manual FanucOmar Yepiz100% (2)
- Buscadores (Ejercicios1)Documento3 páginasBuscadores (Ejercicios1)AntoniaAún no hay calificaciones
- Seguridad en Celdas RobotizadasDocumento10 páginasSeguridad en Celdas RobotizadasChristian LascanoAún no hay calificaciones
- Mantenimiento Del Robot IndustrialDocumento6 páginasMantenimiento Del Robot IndustrialMariano Ënriquë Dë Jësus100% (1)
- Mpd004-p092obr-140-Pets-u-001 0 Mtto de Equipos Pesados Livianos y EstacionariosDocumento23 páginasMpd004-p092obr-140-Pets-u-001 0 Mtto de Equipos Pesados Livianos y EstacionariosJorge Arturo Aranda ArdilesAún no hay calificaciones
- Procedimiento Teach Pendant en Robots LavadorasDocumento13 páginasProcedimiento Teach Pendant en Robots Lavadorasmario eljucaAún no hay calificaciones
- Petrofisica Unidad 3Documento22 páginasPetrofisica Unidad 3Cesar RayoAún no hay calificaciones
- Trabajo Final Curso RobotDocumento15 páginasTrabajo Final Curso RobotRenzo Lescano ParedesAún no hay calificaciones
- Lista de Cotejo para Observaciones de ClaseDocumento5 páginasLista de Cotejo para Observaciones de ClaseNorma Rocha100% (4)
- Automatizacion de Brazo RoboticoDocumento25 páginasAutomatizacion de Brazo RoboticoDavid MartinezAún no hay calificaciones
- Celda RoboticaDocumento22 páginasCelda RoboticaEberthson67% (3)
- Proyecto Brazo Robotico (Senati)Documento26 páginasProyecto Brazo Robotico (Senati)cristhian0% (1)
- Manual Crs f3 FinalizadoDocumento92 páginasManual Crs f3 FinalizadoBennyAguirre100% (1)
- Formato Entrevistas 2020-1Documento7 páginasFormato Entrevistas 2020-1eduin wilchesAún no hay calificaciones
- Fanuc Basico PDFDocumento218 páginasFanuc Basico PDFPrudencio Lopez LopezAún no hay calificaciones
- Diseño de Celdas RobóticasDocumento13 páginasDiseño de Celdas RobóticasMonse Acosta0% (1)
- Manual de Usuario y Seguridad Del Robot A Escala Kuka IrbDocumento17 páginasManual de Usuario y Seguridad Del Robot A Escala Kuka Irbraziel sanchezAún no hay calificaciones
- Prac2 Seg RobDocumento20 páginasPrac2 Seg RobJacke AngelesAún no hay calificaciones
- Diseño y Control de Una Celula RobotizadaDocumento9 páginasDiseño y Control de Una Celula RobotizadaMisael Miguel Matos DíazAún no hay calificaciones
- SABER 3 Unidad 2 ElizaldeDocumento13 páginasSABER 3 Unidad 2 ElizaldeJosé Manuel Ávila LaraAún no hay calificaciones
- Unidad 2, Tema 2.4Documento8 páginasUnidad 2, Tema 2.4Jacke AngelesAún no hay calificaciones
- Estándares y Normativas de Celdas RobotizadasDocumento5 páginasEstándares y Normativas de Celdas RobotizadasGabriel Llerena QuenayaAún no hay calificaciones
- Su DeberDocumento2 páginasSu DeberEnzuka17 incAún no hay calificaciones
- Trabajo de Curso TCDocumento10 páginasTrabajo de Curso TCjorge chavezAún no hay calificaciones
- Poka YokeDocumento3 páginasPoka YokedavidcastanolopezbAún no hay calificaciones
- CTQDocumento1 páginaCTQpafofoAún no hay calificaciones
- Robotstudio Labserver PFCDocumento72 páginasRobotstudio Labserver PFCEva Ibáñez RamosAún no hay calificaciones
- Requerimientos Básicos para El Empleo de La RobóticaDocumento11 páginasRequerimientos Básicos para El Empleo de La RobóticaNathali RodríguezAún no hay calificaciones
- Trabajo de Investigacion - Unidad IvDocumento33 páginasTrabajo de Investigacion - Unidad IvJacke AngelesAún no hay calificaciones
- Introduccion A La RoboticaDocumento5 páginasIntroduccion A La RoboticaGanimedes EstelarAún no hay calificaciones
- Trabajo Final RobóticaDocumento24 páginasTrabajo Final RobóticaMiranda Patricio IgnacioAún no hay calificaciones
- Trabajo de RoboticaDocumento11 páginasTrabajo de Roboticabienvenido recio peñaAún no hay calificaciones
- Unidad 2 28 PagDocumento28 páginasUnidad 2 28 PagadrianahoukiAún no hay calificaciones
- Lab NaoDocumento14 páginasLab NaoDiego Di CalderónAún no hay calificaciones
- Sistemas Integrados de ManufacturaDocumento16 páginasSistemas Integrados de ManufacturaVladimirAún no hay calificaciones
- Perfil Proyecto de Automatización de Un Robot Soldador Tipo ScaraDocumento5 páginasPerfil Proyecto de Automatización de Un Robot Soldador Tipo Scaraalfred_hmAún no hay calificaciones
- Proyecto-Lavadora de Autos (COMPLETO)Documento5 páginasProyecto-Lavadora de Autos (COMPLETO)Israel Romero0% (1)
- Robótica Industrial.Documento2 páginasRobótica Industrial.Walter Norberto LandaburoAún no hay calificaciones
- Investigacion FERROMAXDocumento16 páginasInvestigacion FERROMAXEna UclesAún no hay calificaciones
- La RobóticaDocumento18 páginasLa RobóticaDiego MoralesAún no hay calificaciones
- Criterios de Seguridad para Manipular y Programar Un Robot IndustrialDocumento2 páginasCriterios de Seguridad para Manipular y Programar Un Robot IndustrialDon DinosaurioAún no hay calificaciones
- TEMA 5. Robotica ColaborativaDocumento60 páginasTEMA 5. Robotica ColaborativaEduardo Quintana CasadoAún no hay calificaciones
- Monografia Construccion de Brazo RoboticoDocumento10 páginasMonografia Construccion de Brazo RoboticoCarlos Quispealaya LazoAún no hay calificaciones
- Robotica CapI MDocumento24 páginasRobotica CapI Melizardo macias condoriAún no hay calificaciones
- Ensayo RobóticaDocumento11 páginasEnsayo RobóticaErik Alejandro Melendez OlguínAún no hay calificaciones
- U3P1 Guerrero Ramirez Diego Rene PDFDocumento5 páginasU3P1 Guerrero Ramirez Diego Rene PDFQuesos HwAún no hay calificaciones
- Camacho - Cordero - TD - Tarea - Robot Colaborador Vs Robot IndustrialDocumento10 páginasCamacho - Cordero - TD - Tarea - Robot Colaborador Vs Robot IndustrialarnoldochuacheneguerAún no hay calificaciones
- Articulo CientificoDocumento11 páginasArticulo CientificoGustavo MaradiagaAún no hay calificaciones
- Tarea 4Documento11 páginasTarea 4Anthony StAún no hay calificaciones
- Introduccion A La RoboticaDocumento148 páginasIntroduccion A La RoboticaJose Manuel Moa PerezAún no hay calificaciones
- Proyecto Lavado de Autos PDFDocumento14 páginasProyecto Lavado de Autos PDFViridiana AlvaresAún no hay calificaciones
- Definicion de Los Robots ColaborativosDocumento14 páginasDefinicion de Los Robots ColaborativosLeyver De la CruzAún no hay calificaciones
- La Computación en La RobóticaDocumento15 páginasLa Computación en La RobóticaSamuel Gómez0% (1)
- Robotica en La Industria y Regla de JacksonDocumento30 páginasRobotica en La Industria y Regla de JacksonlorenaAún no hay calificaciones
- Parte Eduardo ATIDocumento3 páginasParte Eduardo ATIjuanitoescutiapedroAún no hay calificaciones
- Robots Manual MitsubishiDocumento23 páginasRobots Manual MitsubishiJose Fernandez100% (1)
- Actividad 1 Automatización IndustrialDocumento3 páginasActividad 1 Automatización IndustrialKevin RoqueAún no hay calificaciones
- 1244Documento34 páginas1244Antonio Abdul HernAndez AcostaAún no hay calificaciones
- Ensayo RoboticaDocumento7 páginasEnsayo Roboticacarlos tremoladaAún no hay calificaciones
- Ataques en Aplicaciones Web - Ramírez LuzDocumento3 páginasAtaques en Aplicaciones Web - Ramírez LuzEmmaAún no hay calificaciones
- Celdas RoboticasDocumento27 páginasCeldas RoboticasXimena GonzalezAún no hay calificaciones
- La Filosofía Administrativa Del Control Total de Calidad.Documento9 páginasLa Filosofía Administrativa Del Control Total de Calidad.Hugo VelazquezAún no hay calificaciones
- Tesis: Subcontratación en La UTEMDocumento200 páginasTesis: Subcontratación en La UTEMIván Cardoza100% (1)
- Conciliación Bancaria: Libro BancosDocumento19 páginasConciliación Bancaria: Libro BancosErica Canales QuispeAún no hay calificaciones
- CurriculumDocumento6 páginasCurriculumloretto RiquelmeAún no hay calificaciones
- Presentación Bloque 2Documento39 páginasPresentación Bloque 2Manu ArroyoAún no hay calificaciones
- Planificación de Aula Clase A ClaseDocumento16 páginasPlanificación de Aula Clase A ClaseRene SandovalAún no hay calificaciones
- Ensayo - Recuperacion Del Lago Del CisneDocumento4 páginasEnsayo - Recuperacion Del Lago Del CisneAlejandra BlancoAún no hay calificaciones
- ENTREGABLE - 1 ModificadoDocumento3 páginasENTREGABLE - 1 ModificadoCarlo Giovanni Cetina CamachoAún no hay calificaciones
- Compartir Archivos Entre Dos PCDocumento7 páginasCompartir Archivos Entre Dos PCliriko12Aún no hay calificaciones
- Diagrama Ladder PLCDocumento5 páginasDiagrama Ladder PLCOscarAliagaAún no hay calificaciones
- Planteamiento de Modelos PropuestosDocumento8 páginasPlanteamiento de Modelos PropuestosErick Cupul0% (1)
- Caso Practico4Documento2 páginasCaso Practico4Eduardo Salgado EnríquezAún no hay calificaciones
- Tema - 1 - Revit y Entorno BIMDocumento48 páginasTema - 1 - Revit y Entorno BIMluijhy_203628Aún no hay calificaciones
- Revista PRELAC N°2 EspanolDocumento147 páginasRevista PRELAC N°2 EspanolFrancia Pamela Albornoz AlvarezAún no hay calificaciones
- 01 - Electricidad Automotriz Unidad 1 PDFDocumento19 páginas01 - Electricidad Automotriz Unidad 1 PDFdanielmd1050% (2)
- PavimentosDocumento24 páginasPavimentosFioo Fioo FarfanAún no hay calificaciones
- Problemas QuimicaDocumento41 páginasProblemas QuimicaSandraMarquez57% (7)
- Criterios de Seleccion y Calculo de PlantasDocumento69 páginasCriterios de Seleccion y Calculo de PlantasEduardo EstradaAún no hay calificaciones
- FORMATO DE REQUISICION PROCURA Mack GraniteDocumento1 páginaFORMATO DE REQUISICION PROCURA Mack GraniteJean ChacónAún no hay calificaciones
- GRUPO Nº3-TRABAJO DE INVESTIGACION - ManuelDocumento25 páginasGRUPO Nº3-TRABAJO DE INVESTIGACION - ManuelSara Yanac HuamanAún no hay calificaciones
- Desarrollo de Un Material Compuesto para - Desconocido PDFDocumento222 páginasDesarrollo de Un Material Compuesto para - Desconocido PDFfsosa1Aún no hay calificaciones
- Ejercicios CompresionDocumento14 páginasEjercicios CompresionFernando MercadoAún no hay calificaciones