También podría gustarte
- Manual de Taller Serie 200 Adv Esp PDFDocumento1657 páginasManual de Taller Serie 200 Adv Esp PDFmarcelo7ulate86% (21)
- Mantenimiento de sistemas auxiliares del motor de ciclo diésel. TMVG0409De EverandMantenimiento de sistemas auxiliares del motor de ciclo diésel. TMVG0409Calificación: 5 de 5 estrellas5/5 (7)
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209De EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Calificación: 5 de 5 estrellas5/5 (2)
- UF1217 - Mantenimiento de sistemas auxiliares del motor de ciclo dieselDe EverandUF1217 - Mantenimiento de sistemas auxiliares del motor de ciclo dieselCalificación: 3.5 de 5 estrellas3.5/5 (3)
- Servicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoDe EverandServicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoCalificación: 5 de 5 estrellas5/5 (1)
- Manual Variadores de FrecuenciaDocumento26 páginasManual Variadores de FrecuenciaLuis ROJAS ARRIETAAún no hay calificaciones
- Tecnicas para Variar La Velocidad de Motores de CD y CADocumento11 páginasTecnicas para Variar La Velocidad de Motores de CD y CAVictor NuñezAún no hay calificaciones
- Moly-Cop - Tools - 2011 - Parte 1Documento174 páginasMoly-Cop - Tools - 2011 - Parte 1Javi Ramos100% (1)
- Control de Velocidad Del Motor de InducciónDocumento7 páginasControl de Velocidad Del Motor de InducciónSteven CastroAún no hay calificaciones
- Práctica 7 MOTOR DE CORRIENTE DIRECTA COMPUESTODocumento6 páginasPráctica 7 MOTOR DE CORRIENTE DIRECTA COMPUESTORafa Zarate100% (1)
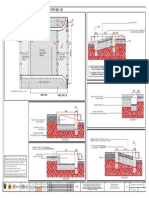
- Informe Planta Asfalto Maceda TarapotoDocumento23 páginasInforme Planta Asfalto Maceda TarapotoWillian Fuentes Cotrina50% (2)
- Variadores de Velocidad SiemensDocumento4 páginasVariadores de Velocidad Siemens1uuiiss100% (1)
- Espacio Publico PompeyanoDocumento1 páginaEspacio Publico Pompeyanoaldair jose cantillo100% (2)
- Tema 3 Manejo de TablasDocumento13 páginasTema 3 Manejo de TablasJuli De Al RdgzAún no hay calificaciones
- Unidad de Control Del Sistema Con EDCDocumento8 páginasUnidad de Control Del Sistema Con EDCNuestro Amor Sera LeyendaAún no hay calificaciones
- Introducción A Los ControlesDocumento65 páginasIntroducción A Los Controlesedgar100% (1)
- Edc Boma de InyeccionDocumento17 páginasEdc Boma de InyeccionKjatunMayu GutierrezAún no hay calificaciones
- PRACTICA 7. El Motor Compuesto de CD PDFDocumento4 páginasPRACTICA 7. El Motor Compuesto de CD PDFLuisAún no hay calificaciones
- Controlador de VelocidadDocumento6 páginasControlador de VelocidadAdrian MaruriAún no hay calificaciones
- Arrancadores SuavesDocumento14 páginasArrancadores SuavesDavid MiseAún no hay calificaciones
- Tarjeta de Control de VelocidadDocumento18 páginasTarjeta de Control de VelocidadItzel Armenta RiosAún no hay calificaciones
- Motor CompuestoDocumento8 páginasMotor CompuestoCarlos Daniel LemuzAún no hay calificaciones
- Pump SaverDocumento21 páginasPump SaverCarlos FontalvoAún no hay calificaciones
- Transitorios de Arranque de Motores de Induccion Trifasicos de 450hp Simulados Con SoftwareDocumento9 páginasTransitorios de Arranque de Motores de Induccion Trifasicos de 450hp Simulados Con SoftwareOscar GutierrezAún no hay calificaciones
- CONTROL DE MOTOR CC POR PWM BASICOlab3 SensoresDocumento14 páginasCONTROL DE MOTOR CC POR PWM BASICOlab3 SensoresDiego Andree Reynoso YanaAún no hay calificaciones
- 1.6. Regulación de La Velocidad Del MotorDocumento17 páginas1.6. Regulación de La Velocidad Del MotorMarcos MartinezAún no hay calificaciones
- Clase #15 - Motores CCDocumento24 páginasClase #15 - Motores CCDiego Rodrigo Caballero PalaciosAún no hay calificaciones
- Practica 05 Maquinas ElecectricasDocumento19 páginasPractica 05 Maquinas ElecectricasMoneAún no hay calificaciones
- Informe SSW06 WegDocumento15 páginasInforme SSW06 WegsamuelAún no hay calificaciones
- Resumen 8.9 PDFDocumento6 páginasResumen 8.9 PDFOscielSanchezAún no hay calificaciones
- Motor ShuntDocumento8 páginasMotor ShuntJorge Isaac Del Rosario AcostaAún no hay calificaciones
- Frenado DinamicoDocumento4 páginasFrenado Dinamicojorgito182Aún no hay calificaciones
- Introducción SERVOMOTORESDocumento8 páginasIntroducción SERVOMOTORESfernando santillanAún no hay calificaciones
- Investigacion VDV CCDocumento14 páginasInvestigacion VDV CCFrancisco javier Copa callesAún no hay calificaciones
- Motores Corriente ContinuaDocumento4 páginasMotores Corriente Continuafernando gomezAún no hay calificaciones
- Construcción y Ajuste Del Control PIDDocumento10 páginasConstrucción y Ajuste Del Control PIDJorge ArmandoAún no hay calificaciones
- Reporte 7 MAQUINAS, Silva MinuttiDocumento8 páginasReporte 7 MAQUINAS, Silva MinuttiSilva Minutti RomanAún no hay calificaciones
- Manual de Instrucciones de Montaje Manual de InstalacionDocumento7 páginasManual de Instrucciones de Montaje Manual de InstalacionLeandro OlivaresAún no hay calificaciones
- CONVERTIDOR DE FRECUENCIA CON MODULACIÃ - N POR AMPLITUD DE PULSO Con NumerosDocumento128 páginasCONVERTIDOR DE FRECUENCIA CON MODULACIÃ - N POR AMPLITUD DE PULSO Con NumerosguillermoAún no hay calificaciones
- 1 Capacidad de SobrecargaDocumento6 páginas1 Capacidad de SobrecargaXiomara Ashly Apaza ApazaAún no hay calificaciones
- Sistema de Carga y Arranque Del MotorDocumento13 páginasSistema de Carga y Arranque Del MotorFernando Kahlo ReateguiAún no hay calificaciones
- 6 Arrancador SuaveDocumento28 páginas6 Arrancador SuaveGisela LázaroAún no hay calificaciones
- Control de Motores DCDocumento3 páginasControl de Motores DCLuis Alfredo Ventura RamosAún no hay calificaciones
- Practica 5 - MEDocumento20 páginasPractica 5 - MEbrenda mont truAún no hay calificaciones
- Practica No. 2 Control de Proporcional PDocumento12 páginasPractica No. 2 Control de Proporcional PHector UCAún no hay calificaciones
- Control de La Puesta en Marcha de MotoresDocumento13 páginasControl de La Puesta en Marcha de Motoresjox5Aún no hay calificaciones
- Puesta en Servicio de Variadores de VelocidadDocumento7 páginasPuesta en Servicio de Variadores de VelocidadGiamfranco VillarrealAún no hay calificaciones
- Practica #10 Lab PotDocumento7 páginasPractica #10 Lab PotRonald GarcíaAún no hay calificaciones
- Práctica 1 Arranque de Un Motor CD A Tiempo Definido Con Dos Pasos de Aceleración Usando El PLC Simatic S7200Documento6 páginasPráctica 1 Arranque de Un Motor CD A Tiempo Definido Con Dos Pasos de Aceleración Usando El PLC Simatic S7200MarcoSandovalAún no hay calificaciones
- Máquinas de Corriente ContinúaDocumento16 páginasMáquinas de Corriente ContinúaMargiori NCAún no hay calificaciones
- Motores Electricos - Lineas de TransmisionDocumento12 páginasMotores Electricos - Lineas de TransmisionJeffry OchoaAún no hay calificaciones
- Datasheet Motor (Autoguardado)Documento15 páginasDatasheet Motor (Autoguardado)Raul Alberto Lizarraga CuevasAún no hay calificaciones
- Cuestionario Maquinas de CC Comple2Documento9 páginasCuestionario Maquinas de CC Comple2Moises Veyvidea100% (1)
- Servomotor de ModelismoDocumento15 páginasServomotor de ModelismoJessica SariAún no hay calificaciones
- Pto MpapDocumento8 páginasPto MpapEmanuel López LAún no hay calificaciones
- KakaDocumento12 páginasKakanokdiegoAún no hay calificaciones
- Programación Virtual de Variador de Frecuencia SiemensDocumento4 páginasProgramación Virtual de Variador de Frecuencia SiemensJhonatan SanabriaAún no hay calificaciones
- AC AC TrifasicosDocumento113 páginasAC AC Trifasicoswildpere50% (2)
- Guia Laboratorio 25Documento5 páginasGuia Laboratorio 25caguanonatalyAún no hay calificaciones
- P5 ME Gabino RiveraDocumento25 páginasP5 ME Gabino RiveraMoneAún no hay calificaciones
- Examen Final JOAN GOMEZ 2071501Documento6 páginasExamen Final JOAN GOMEZ 2071501ENMANUEL GOMEZ CABAAún no hay calificaciones
- Motor AsincronicoDocumento7 páginasMotor AsincronicoYenlokingAún no hay calificaciones
- Sistemas de Arranque de Motores en El Ámbito IndustrialDocumento6 páginasSistemas de Arranque de Motores en El Ámbito IndustrialWilli Apupalo NaranjoAún no hay calificaciones
- Reporte Control de Posicion de Motor DCDocumento14 páginasReporte Control de Posicion de Motor DCGuillermo CarrascoAún no hay calificaciones
- ELE-213 Guía5-JOSE BLANCO MARACAYO-2012-0997Documento6 páginasELE-213 Guía5-JOSE BLANCO MARACAYO-2012-0997Jose MaracayoAún no hay calificaciones
- Catalogo Timsun 2018Documento12 páginasCatalogo Timsun 2018Omar PiedraAún no hay calificaciones
- Cañones y Obuses de ArtilleríaDocumento5 páginasCañones y Obuses de ArtilleríaEdwyn Tanco VillafrancaAún no hay calificaciones
- Justificación Teórica Y Económica de La Utilización de Los Sistemas TrifásicosDocumento2 páginasJustificación Teórica Y Económica de La Utilización de Los Sistemas TrifásicosMijael Huaman SaavedraAún no hay calificaciones
- Oficio #0167-2022-Dfe-UncpDocumento5 páginasOficio #0167-2022-Dfe-UncpGustavo Ponce AguiAún no hay calificaciones
- PFC Aida Ferro ArdanuyDocumento130 páginasPFC Aida Ferro ArdanuyJosueAltamiranoReyesAún no hay calificaciones
- Complemento Tema 1Documento16 páginasComplemento Tema 1Alex Jesus Jimenez NoleAún no hay calificaciones
- Produccion de Acido CitricoDocumento16 páginasProduccion de Acido Citricocelina podettiAún no hay calificaciones
- Inks CapeDocumento3 páginasInks CapeMarceloAvilaCruz100% (1)
- TP 1 Flujos Masicos y Energeticos VFDocumento19 páginasTP 1 Flujos Masicos y Energeticos VFPaulo PaezAún no hay calificaciones
- Ing. Civil FORMATOS-PRACTICAS-PRE-PROFESIONALES.Documento10 páginasIng. Civil FORMATOS-PRACTICAS-PRE-PROFESIONALES.Lizbeth Urgiles RodriguesAún no hay calificaciones
- F0202702 ES Tapcon230 PDFDocumento10 páginasF0202702 ES Tapcon230 PDFBrian LewisAún no hay calificaciones
- Grasa 3750-3752Documento2 páginasGrasa 3750-3752tibanaboyacaAún no hay calificaciones
- TRP Aplus V01Documento2 páginasTRP Aplus V01Martin Elias Ortiz100% (1)
- Directrices Medioambientales 21 07 09MARMDocumento43 páginasDirectrices Medioambientales 21 07 09MARMmasterpp_1Aún no hay calificaciones
- Antologia Control AnalogicoDocumento61 páginasAntologia Control AnalogicoJuan Lopez GarciaAún no hay calificaciones
- SIGC-C-F-1.0 Listado Maestro Documentos Internos OPERACIONESDocumento2 páginasSIGC-C-F-1.0 Listado Maestro Documentos Internos OPERACIONESEdwinSandovalLeon100% (1)
- Culminado Catalogo de Repuestos DiamantinaDocumento26 páginasCulminado Catalogo de Repuestos DiamantinaAnonymous rcCmp6l3Aún no hay calificaciones
- Evidencia 1-2Documento1 páginaEvidencia 1-2Angie RuizAún no hay calificaciones
- Procedimiento DE Entregas de Epp.: Responsables A Cargo:Fernanda Cornejo:Maria Jose JimenezDocumento12 páginasProcedimiento DE Entregas de Epp.: Responsables A Cargo:Fernanda Cornejo:Maria Jose JimenezKote Jiménez RAún no hay calificaciones
- Ingenieria de Gas 1Documento30 páginasIngenieria de Gas 1Jose Guarnizo GarciaAún no hay calificaciones
- Requerimientos para Plataforma GarzaDocumento19 páginasRequerimientos para Plataforma GarzaAna VazquezAún no hay calificaciones
- Caso - RESONANCIA PERÚDocumento49 páginasCaso - RESONANCIA PERÚwildor01Aún no hay calificaciones
- Acoplamientosunc20!10!14 141103194942 Conversion Gate01Documento20 páginasAcoplamientosunc20!10!14 141103194942 Conversion Gate01Alvaro Felipe CharlinAún no hay calificaciones
- Distribucion Plantas ...Documento5 páginasDistribucion Plantas ...hilma medinaAún no hay calificaciones