También podría gustarte
- P1 proyectoEspacioEstados2022 Guerrero SantianaDocumento13 páginasP1 proyectoEspacioEstados2022 Guerrero SantianaMarco MendozaAún no hay calificaciones
- Evaluacion de La Sustentabilidad Comunitaria EscDocumento5 páginasEvaluacion de La Sustentabilidad Comunitaria Escxavier ortizAún no hay calificaciones
- Manual Audi A2Documento44 páginasManual Audi A2ROBERTOAún no hay calificaciones
- Se Tiene La Edad de 40 Personas Realizar Su Tabla de FrecuenciaDocumento11 páginasSe Tiene La Edad de 40 Personas Realizar Su Tabla de FrecuenciaLuis Amaro TrinidasAún no hay calificaciones
- WEG Contactores y Reles de Sobrecarga 50036562 Catalogo Espanol PDFDocumento104 páginasWEG Contactores y Reles de Sobrecarga 50036562 Catalogo Espanol PDFEnriqueQAún no hay calificaciones
- Iso RosyDocumento1 páginaIso Rosybryanrq53Aún no hay calificaciones
- PROBLEMAPOKAYOKEDocumento3 páginasPROBLEMAPOKAYOKEmiguel sanchezAún no hay calificaciones
- 03 4012-018 - Motor - NormalDocumento2 páginas03 4012-018 - Motor - NormalPedro BautistaAún no hay calificaciones
- ColiformesDocumento132 páginasColiformesIvy AlexitaAún no hay calificaciones
- Ejercicios AutoCADDocumento13 páginasEjercicios AutoCADEstudio H.AVILAAún no hay calificaciones
- Trabajo Final ElectDocumento9 páginasTrabajo Final ElectAlejandro Abelé RuizAún no hay calificaciones
- Check Lis Da62-05389a Insulation Duct RefDocumento3 páginasCheck Lis Da62-05389a Insulation Duct RefHanmac MéxicoAún no hay calificaciones
- Reporte de Gestión SSO Del 13 Al 19 de Enero Del 2020Documento15 páginasReporte de Gestión SSO Del 13 Al 19 de Enero Del 2020Damaris lopez100% (1)
- Cadenas de Suministros Esbeltas o Apropiadas (Lean or Fit) PDFDocumento54 páginasCadenas de Suministros Esbeltas o Apropiadas (Lean or Fit) PDFJaime Tiburcio CortésAún no hay calificaciones
- Cartas de Control para AtributosDocumento18 páginasCartas de Control para AtributosGabriel Jose CollazoAún no hay calificaciones
- Enfierradura Desc. CF04.2-1Documento1 páginaEnfierradura Desc. CF04.2-1Juan Sepúlveda GutiérrezAún no hay calificaciones
- Ejercicios de U y PDocumento8 páginasEjercicios de U y PvitazuxAún no hay calificaciones
- Análisis de Regresión LinealDocumento15 páginasAnálisis de Regresión Linealkarla Jiménez TrejoAún no hay calificaciones
- Taller No. 1Documento3 páginasTaller No. 1Paola RodriguezAún no hay calificaciones
- .Formato de Planilla para Calcular El Costo de Plla de MaestranzaDocumento9 páginas.Formato de Planilla para Calcular El Costo de Plla de MaestranzaAnonymous f6Pxgo7woAún no hay calificaciones
- MC-2414 Ejercicio Sistema ElevadorDocumento1 páginaMC-2414 Ejercicio Sistema ElevadorFrancisco Javier Zambrano RuizAún no hay calificaciones
- Sistemas automáticos - Ingeniería eléctricaDocumento3 páginasSistemas automáticos - Ingeniería eléctricaAlberto RoyoAún no hay calificaciones
- AnexosDocumento4 páginasAnexosPipe RodriguezAún no hay calificaciones
- TAdmón KT y PDCDocumento16 páginasTAdmón KT y PDCDiego VegaAún no hay calificaciones
- Clase Calculo de EVACUACION EDUDocumento55 páginasClase Calculo de EVACUACION EDUDyan ChavezAún no hay calificaciones
- Alerta de viscosidad en motor CAT 3050cDocumento2 páginasAlerta de viscosidad en motor CAT 3050cCristian Ortega AlcarazAún no hay calificaciones
- Check Lis Da61-08273a Case French FronDocumento3 páginasCheck Lis Da61-08273a Case French FronHanmac MéxicoAún no hay calificaciones
- Matriz de Rigidez Portico Con Columnas Eje 1-1Documento167 páginasMatriz de Rigidez Portico Con Columnas Eje 1-1DiegoAromRequeSuarezAún no hay calificaciones
- Informe 10 - Jfet Divisor de Voltaje PDFDocumento12 páginasInforme 10 - Jfet Divisor de Voltaje PDFRaul Depaz NuñezAún no hay calificaciones
- WEG Contactores y Reles de Sobrecarga 1046 Catalogo EspanolDocumento61 páginasWEG Contactores y Reles de Sobrecarga 1046 Catalogo EspanolanysebastianAún no hay calificaciones
- CARREFOURDocumento29 páginasCARREFOURJennifer LambAún no hay calificaciones
- Epidemiología - Análisis de Tendencias y TasasDocumento8 páginasEpidemiología - Análisis de Tendencias y TasasCamila Moroso VelascoAún no hay calificaciones
- Tema de Clase-Tabla de FrecuenciasDocumento8 páginasTema de Clase-Tabla de FrecuenciasJohn GuamanAún no hay calificaciones
- Check Lis Ref 6002-000213 Screw TappingDocumento3 páginasCheck Lis Ref 6002-000213 Screw TappingHanmac MéxicoAún no hay calificaciones
- Check Lis Ref Da61-14701a Suport Cap DoorDocumento3 páginasCheck Lis Ref Da61-14701a Suport Cap DoorHanmac MéxicoAún no hay calificaciones
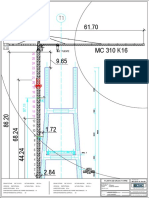
- Arriostramiento - MC 310 K16Documento2 páginasArriostramiento - MC 310 K16Jhousep steven Mesia gonzalesAún no hay calificaciones
- Tarea 6Documento5 páginasTarea 6Juan pablo LagosAún no hay calificaciones
- EXAMEN FINAL MICRODocumento22 páginasEXAMEN FINAL MICROJhudith Chuquimango MinayaAún no hay calificaciones
- EF - MICROECONOMIA Grupo 17 Esteban Nuñez GianfrancoDocumento17 páginasEF - MICROECONOMIA Grupo 17 Esteban Nuñez GianfrancoGianfranco EstebanAún no hay calificaciones
- E284 ES2 02 X+E6F C+DatasheetDocumento2 páginasE284 ES2 02 X+E6F C+Datasheetpayaso1234Aún no hay calificaciones
- Edades Familias 360633Documento4 páginasEdades Familias 360633Karely AguiñagaAún no hay calificaciones
- Check Lis Ref Da67-05229a, B, C, Cap Door Ref UpDocumento3 páginasCheck Lis Ref Da67-05229a, B, C, Cap Door Ref UpHanmac MéxicoAún no hay calificaciones
- Manual K206MADocumento70 páginasManual K206MAEduardo OrtizAún no hay calificaciones
- Gráfico de Control Por Atributos P, C y UDocumento48 páginasGráfico de Control Por Atributos P, C y UAlexa MendozaAún no hay calificaciones
- CortadoraPisoPreopSEODocumento1 páginaCortadoraPisoPreopSEOCoordinación SSTAún no hay calificaciones
- Relación entre producto total, medio y marginalDocumento6 páginasRelación entre producto total, medio y marginalMarco Salazar NuñezAún no hay calificaciones
- Ejercicios Capitulo 7Documento15 páginasEjercicios Capitulo 7Yari Bellamy100% (5)
- RSP-Art257a259Documento7 páginasRSP-Art257a259RenéAlvarezPoloAún no hay calificaciones
- Laboratorio #6 Control de Calidad 2017Documento38 páginasLaboratorio #6 Control de Calidad 2017aleAún no hay calificaciones
- Gráficos de control de calidad y análisis de capacidad de procesoDocumento3 páginasGráficos de control de calidad y análisis de capacidad de procesopablo perezAún no hay calificaciones
- Anexo 61. SST-FO-54. Sierra CircularDocumento1 páginaAnexo 61. SST-FO-54. Sierra Circularsst plastibolrionegroAún no hay calificaciones
- Anexo 61. SST-FO-54. Sierra CircularDocumento1 páginaAnexo 61. SST-FO-54. Sierra CircularLUISA FERNANDA ARTETA MARIOTIAún no hay calificaciones
- Inspección preoperacional sierra circularDocumento1 páginaInspección preoperacional sierra circularlina paola ramirez guerreroAún no hay calificaciones
- Anexo 61. SST-FO-54. Sierra CircularDocumento1 páginaAnexo 61. SST-FO-54. Sierra CircularSG-SST SAWAún no hay calificaciones
- Diagrama de Fi Xiomara Tarea 4Documento5 páginasDiagrama de Fi Xiomara Tarea 4mercadogalvezxiomaraAún no hay calificaciones
- Ajuste, puesta en marcha y regulación de los sistemas mecánicos. FMEE0208De EverandAjuste, puesta en marcha y regulación de los sistemas mecánicos. FMEE0208Calificación: 4 de 5 estrellas4/5 (1)
- UF1253 - Diagnóstico de deformaciones estructuralesDe EverandUF1253 - Diagnóstico de deformaciones estructuralesAún no hay calificaciones
- Control de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalDe EverandControl de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalCalificación: 5 de 5 estrellas5/5 (4)
- Estándares/Normas internacionales de información financiera (IFRS/NIIF) - 2da edición: Incluye ejercicios y estudios de casoDe EverandEstándares/Normas internacionales de información financiera (IFRS/NIIF) - 2da edición: Incluye ejercicios y estudios de casoAún no hay calificaciones
- Formato de Autoreporte de Condiciones de Trabajo 1Documento4 páginasFormato de Autoreporte de Condiciones de Trabajo 1Gina ReyesAún no hay calificaciones
- Aplicaciones Del Cemento Asfáltico para PavimentosDocumento17 páginasAplicaciones Del Cemento Asfáltico para PavimentosHelen TejedaAún no hay calificaciones
- Morales Johan - AEDE (MN)Documento4 páginasMorales Johan - AEDE (MN)Johan MoralesAún no hay calificaciones
- Soluciones problemas control automatización Laplace transferenciaDocumento11 páginasSoluciones problemas control automatización Laplace transferenciaJavier Seco CenalmorAún no hay calificaciones
- R2-A1-S6 Cuestionario Aplicaciones - Revisión Del IntentoDocumento12 páginasR2-A1-S6 Cuestionario Aplicaciones - Revisión Del IntentoAntonella GarciaAún no hay calificaciones
- Convección natural y forzada en transferencia de calorDocumento23 páginasConvección natural y forzada en transferencia de calorRonal DiazAún no hay calificaciones
- Manual Visualizado Slurry Seal - 1Documento29 páginasManual Visualizado Slurry Seal - 1Jony GutiérrezAún no hay calificaciones
- Ley de Gauss Introducción: A, Cuyo Plano Tiene Una OrientaciónDocumento2 páginasLey de Gauss Introducción: A, Cuyo Plano Tiene Una Orientaciónian Josué Trespalacios VanstrahlemAún no hay calificaciones
- Física 3: 1.1-Carga EléctricaDocumento4 páginasFísica 3: 1.1-Carga EléctricaGiovana MarachiAún no hay calificaciones
- Previo3 1501C Coloides GarcíaYorbaDocumento7 páginasPrevio3 1501C Coloides GarcíaYorbaJair CortesAún no hay calificaciones
- Actividad Fundamental 3 - ME3Documento13 páginasActividad Fundamental 3 - ME3Garza LizAún no hay calificaciones
- Informe de Laboratorio Numero 7Documento8 páginasInforme de Laboratorio Numero 7ana alonsoAún no hay calificaciones
- Origen Del SueloDocumento6 páginasOrigen Del SueloCarlos IntriagoAún no hay calificaciones
- Electronegatividad PresentacionDocumento9 páginasElectronegatividad PresentacionAbril MolinaAún no hay calificaciones
- Destilacion FlashDocumento29 páginasDestilacion FlashLuis Carlos Ayllón EscobarAún no hay calificaciones
- Ley Inercia Ejemplos CotidianoDocumento9 páginasLey Inercia Ejemplos CotidianoJohana CubillosAún no hay calificaciones
- 2018 01 Fii Semana 02 Sesin 5Documento17 páginas2018 01 Fii Semana 02 Sesin 5Vanessa FalconAún no hay calificaciones
- UNIDAD 1 Material 5-Breve Recorrido Historico-Social Desde La Perspectiva Saber-PoderDocumento11 páginasUNIDAD 1 Material 5-Breve Recorrido Historico-Social Desde La Perspectiva Saber-PoderVeronica OdellaAún no hay calificaciones
- Sistemas de Frenos Primera Clase2Documento66 páginasSistemas de Frenos Primera Clase2Mauricio HernandezAún no hay calificaciones
- Lista de Verificación-021 para Trabajos en Los Que Exista Riesgo de Caer Al AguaDocumento1 páginaLista de Verificación-021 para Trabajos en Los Que Exista Riesgo de Caer Al AgualinkjcarlosAún no hay calificaciones
- Manual de Instalación y Mantenimiento - 011076 Intelliflo3-Pro3Documento32 páginasManual de Instalación y Mantenimiento - 011076 Intelliflo3-Pro3compras1Aún no hay calificaciones
- Capacidad de secado y enfriamiento de granosDocumento11 páginasCapacidad de secado y enfriamiento de granosNelsonAún no hay calificaciones
- Semana 9 y 10Documento15 páginasSemana 9 y 10Renato Rios RomeroAún no hay calificaciones
- Trabajo Práctico N°1: Medición de ViscosidadDocumento15 páginasTrabajo Práctico N°1: Medición de ViscosidadRomina GalarzaAún no hay calificaciones
- Definición BiomecánicaDocumento3 páginasDefinición BiomecánicaJonattanAún no hay calificaciones
- Universidad NacionalDocumento3 páginasUniversidad NacionalPercy Torres Avalos KeplerAún no hay calificaciones
- Floculación en tratamiento de aguas: definición y procesoDocumento32 páginasFloculación en tratamiento de aguas: definición y procesoabel100% (1)
- Ejercicios Propuestos Mecanica de Suelos I Grupo ADocumento11 páginasEjercicios Propuestos Mecanica de Suelos I Grupo AJhonatan Eriquita EriquitaAún no hay calificaciones
- Diseño sismorresistente de vigasDocumento4 páginasDiseño sismorresistente de vigasCristian Mauricio Salas AdriázolaAún no hay calificaciones
- Guía No 1. Química. Grado Once. Soluciones PDFDocumento3 páginasGuía No 1. Química. Grado Once. Soluciones PDFAlejandro MoraAún no hay calificaciones