También podría gustarte
- Proyecto Espacio Estados 2023Documento4 páginasProyecto Espacio Estados 2023Boris Alexander Mera BautistaAún no hay calificaciones
- Evaluacion de La Sustentabilidad Comunitaria EscDocumento5 páginasEvaluacion de La Sustentabilidad Comunitaria Escxavier ortizAún no hay calificaciones
- Check Lis Da62-05389a Insulation Duct RefDocumento3 páginasCheck Lis Da62-05389a Insulation Duct RefHanmac MéxicoAún no hay calificaciones
- WEG Contactores y Reles de Sobrecarga 50036562 Catalogo Espanol PDFDocumento104 páginasWEG Contactores y Reles de Sobrecarga 50036562 Catalogo Espanol PDFEnriqueQAún no hay calificaciones
- Check Lis Da61-08273a Case French FronDocumento3 páginasCheck Lis Da61-08273a Case French FronHanmac MéxicoAún no hay calificaciones
- Enfierradura Desc. CF04.2-1Documento1 páginaEnfierradura Desc. CF04.2-1Juan Sepúlveda GutiérrezAún no hay calificaciones
- Check Lis Ref Da61-14701a Suport Cap DoorDocumento3 páginasCheck Lis Ref Da61-14701a Suport Cap DoorHanmac MéxicoAún no hay calificaciones
- Check Lis Ref 6002-000213 Screw TappingDocumento3 páginasCheck Lis Ref 6002-000213 Screw TappingHanmac MéxicoAún no hay calificaciones
- Produccion Total y Produccion MarginalDocumento4 páginasProduccion Total y Produccion MarginalJose Alfredo RiveraAún no hay calificaciones
- Check Lis Ref Da67-05229a, B, C, Cap Door Ref UpDocumento3 páginasCheck Lis Ref Da67-05229a, B, C, Cap Door Ref UpHanmac MéxicoAún no hay calificaciones
- TAdmón KT y PDCDocumento16 páginasTAdmón KT y PDCDiego VegaAún no hay calificaciones
- Gráfico de Control Por Atributos P, C y UDocumento48 páginasGráfico de Control Por Atributos P, C y UAlexa MendozaAún no hay calificaciones
- Actividad Complementaria No.2 Poligonal CerradaDocumento11 páginasActividad Complementaria No.2 Poligonal CerradaMilena RomeroAún no hay calificaciones
- Sistemas automáticos - Ingeniería eléctricaDocumento3 páginasSistemas automáticos - Ingeniería eléctricaAlberto RoyoAún no hay calificaciones
- Clase Calculo de EVACUACION EDUDocumento55 páginasClase Calculo de EVACUACION EDUDyan ChavezAún no hay calificaciones
- Se Tiene La Edad de 40 Personas Realizar Su Tabla de FrecuenciaDocumento11 páginasSe Tiene La Edad de 40 Personas Realizar Su Tabla de FrecuenciaLuis Amaro TrinidasAún no hay calificaciones
- Continuacion de La Guia 2 Lab de EyP 2021-1 SS4 GIANELLA GUERRADocumento10 páginasContinuacion de La Guia 2 Lab de EyP 2021-1 SS4 GIANELLA GUERRAGianella GuerraAún no hay calificaciones
- Análisis de Regresión LinealDocumento15 páginasAnálisis de Regresión Linealkarla Jiménez TrejoAún no hay calificaciones
- Manual Audi A2Documento44 páginasManual Audi A2ROBERTOAún no hay calificaciones
- PROBLEMAPOKAYOKEDocumento3 páginasPROBLEMAPOKAYOKEmiguel sanchezAún no hay calificaciones
- Mec Un2 Taller2 AceleracionesDocumento2 páginasMec Un2 Taller2 AceleracionesKenneth BarrancoAún no hay calificaciones
- Cap 7 EjerciciosDocumento16 páginasCap 7 EjerciciosAxcell Alvarez LinoAún no hay calificaciones
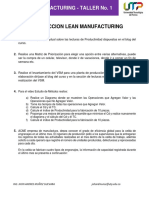
- Taller No. 1Documento3 páginasTaller No. 1Paola RodriguezAún no hay calificaciones
- Reporte de Gestión SSO Del 13 Al 19 de Enero Del 2020Documento15 páginasReporte de Gestión SSO Del 13 Al 19 de Enero Del 2020Damaris lopez100% (1)
- Calibración de transmisor de presión diferencialDocumento6 páginasCalibración de transmisor de presión diferencialMichelle AlexaAún no hay calificaciones
- Cra. 19 #13B Bis-73: Resistencia Pre/Post Reactancia Pre/PostDocumento1 páginaCra. 19 #13B Bis-73: Resistencia Pre/Post Reactancia Pre/PostdamiannnAún no hay calificaciones
- EF - MICROECONOMIA Grupo 17 Esteban Nuñez GianfrancoDocumento17 páginasEF - MICROECONOMIA Grupo 17 Esteban Nuñez GianfrancoGianfranco EstebanAún no hay calificaciones
- ColiformesDocumento132 páginasColiformesIvy AlexitaAún no hay calificaciones
- Cartas de Control para AtributosDocumento18 páginasCartas de Control para AtributosGabriel Jose CollazoAún no hay calificaciones
- Trabajo Final ElectDocumento9 páginasTrabajo Final ElectAlejandro Abelé RuizAún no hay calificaciones
- Grafico de ControlDocumento100 páginasGrafico de ControlGHERALDINE SIALEXIS TANTALEAN ZULUETAAún no hay calificaciones
- Laboratorio #6 Control de Calidad 2017Documento38 páginasLaboratorio #6 Control de Calidad 2017aleAún no hay calificaciones
- AnexosDocumento4 páginasAnexosPipe RodriguezAún no hay calificaciones
- Cadenas de Suministros Esbeltas o Apropiadas (Lean or Fit) PDFDocumento54 páginasCadenas de Suministros Esbeltas o Apropiadas (Lean or Fit) PDFJaime Tiburcio CortésAún no hay calificaciones
- Ejercicios de U y PDocumento8 páginasEjercicios de U y PvitazuxAún no hay calificaciones
- Gmic U3 A2 MapsDocumento6 páginasGmic U3 A2 MapsPoligono San LucasAún no hay calificaciones
- Iso RosyDocumento1 páginaIso Rosybryanrq53Aún no hay calificaciones
- Notas TIR-0744 23-1 Por ExpedienteDocumento1 páginaNotas TIR-0744 23-1 Por ExpedienteGustavo MendozaAún no hay calificaciones
- MT GC22 AC Conexiones V1 R3Documento40 páginasMT GC22 AC Conexiones V1 R3Daniel Saroli CoronadoAún no hay calificaciones
- Unidad 3 y 4 Estudio Del Trabajo 2Documento30 páginasUnidad 3 y 4 Estudio Del Trabajo 2Emmanuel FigueroaAún no hay calificaciones
- Mejora servicio agua ColicochaDocumento149 páginasMejora servicio agua Colicochacesar100% (1)
- Ejercicios Capitulo 7Documento15 páginasEjercicios Capitulo 7Yari Bellamy100% (5)
- Epidemiología - Análisis de Tendencias y TasasDocumento8 páginasEpidemiología - Análisis de Tendencias y TasasCamila Moroso VelascoAún no hay calificaciones
- Taller Esfuerzos GeostaticosDocumento20 páginasTaller Esfuerzos GeostaticosPetter CubidesAún no hay calificaciones
- Multifuncion 2Documento15 páginasMultifuncion 2aelisaAún no hay calificaciones
- Método PERT SEGUIMIENTO-1Documento5 páginasMétodo PERT SEGUIMIENTO-1Amin GarciaAún no hay calificaciones
- WEG Contactores y Reles de Sobrecarga 1046 Catalogo EspanolDocumento61 páginasWEG Contactores y Reles de Sobrecarga 1046 Catalogo EspanolanysebastianAún no hay calificaciones
- Informe 10 - Jfet Divisor de Voltaje PDFDocumento12 páginasInforme 10 - Jfet Divisor de Voltaje PDFRaul Depaz NuñezAún no hay calificaciones
- Imprecion ............... ElvisDocumento13 páginasImprecion ............... ElvisCristian BrionesAún no hay calificaciones
- E284 ES2 02 X+E6F C+DatasheetDocumento2 páginasE284 ES2 02 X+E6F C+Datasheetpayaso1234Aún no hay calificaciones
- CALIDAD. TERCER CORTEDocumento7 páginasCALIDAD. TERCER CORTE10665666Aún no hay calificaciones
- Medidores de caudalDocumento11 páginasMedidores de caudalDaniel HernándezAún no hay calificaciones
- EXAMEN FINAL MICRODocumento22 páginasEXAMEN FINAL MICROJhudith Chuquimango MinayaAún no hay calificaciones
- Anexo 61. SST-FO-54. Sierra CircularDocumento1 páginaAnexo 61. SST-FO-54. Sierra CircularLUISA FERNANDA ARTETA MARIOTIAún no hay calificaciones
- Anexo 61. SST-FO-54. Sierra CircularDocumento1 páginaAnexo 61. SST-FO-54. Sierra Circularsst plastibolrionegroAún no hay calificaciones
- Ajuste, puesta en marcha y regulación de los sistemas mecánicos. FMEE0208De EverandAjuste, puesta en marcha y regulación de los sistemas mecánicos. FMEE0208Calificación: 4 de 5 estrellas4/5 (1)
- Estudio de la inyección diésel mediante la medida del flujo de cantidad de movimiento del chorroDe EverandEstudio de la inyección diésel mediante la medida del flujo de cantidad de movimiento del chorroCalificación: 4.5 de 5 estrellas4.5/5 (4)
- UF1253 - Diagnóstico de deformaciones estructuralesDe EverandUF1253 - Diagnóstico de deformaciones estructuralesAún no hay calificaciones
- Comprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109De EverandComprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Aún no hay calificaciones
- UF1254 - Reparación o sustitución de elementos estructurales de vehículosDe EverandUF1254 - Reparación o sustitución de elementos estructurales de vehículosCalificación: 4.5 de 5 estrellas4.5/5 (3)
- Autorizacion ProyectoDocumento1 páginaAutorizacion ProyectoMarco MendozaAún no hay calificaciones
- Roca Fosfórica.2Documento4 páginasRoca Fosfórica.2Marco MendozaAún no hay calificaciones
- Proyecto1 Arpi Alvarado FeicanDocumento6 páginasProyecto1 Arpi Alvarado FeicanMarco MendozaAún no hay calificaciones
- TapasDocumento2 páginasTapasMarco MendozaAún no hay calificaciones
- Auto ControlDocumento30 páginasAuto ControlMarco MendozaAún no hay calificaciones
- LopezLeonardo, NaranjoPaola NaranjoMauricio Proyecto 1Documento7 páginasLopezLeonardo, NaranjoPaola NaranjoMauricio Proyecto 1Marco MendozaAún no hay calificaciones
- Programacion DinamicaDocumento6 páginasProgramacion DinamicaMarco MendozaAún no hay calificaciones
- Proyecto1 Chapaca - RuizDocumento10 páginasProyecto1 Chapaca - RuizMarco MendozaAún no hay calificaciones
- Guia Procesos EstocasticosDocumento73 páginasGuia Procesos EstocasticosPatricio Salazar100% (3)
- Control avanzado de procesos - Sistemas de seguimiento integral y de trayectoriasDocumento13 páginasControl avanzado de procesos - Sistemas de seguimiento integral y de trayectoriasMarco MendozaAún no hay calificaciones
- 200 Problemas de AlgoDocumento78 páginas200 Problemas de AlgoMarco MendozaAún no hay calificaciones
- Coordenadas CurvilineasDocumento10 páginasCoordenadas CurvilineasMarco MendozaAún no hay calificaciones
- Ayuda Ntia 2Documento1 páginaAyuda Ntia 2Marco MendozaAún no hay calificaciones
- Ayuda Ntia 1Documento1 páginaAyuda Ntia 1Marco MendozaAún no hay calificaciones
- La Teoria Big Bang MegaDocumento2 páginasLa Teoria Big Bang MegaMarco MendozaAún no hay calificaciones
- Regla de La CadenaDocumento35 páginasRegla de La CadenaMarco MendozaAún no hay calificaciones
- Cap 2Documento61 páginasCap 2Marco MendozaAún no hay calificaciones
- Analogías para Comprender La ElectricidadDocumento9 páginasAnalogías para Comprender La ElectricidadmonicamaritzaAún no hay calificaciones
- Cap 7 - Awk EstudioDocumento13 páginasCap 7 - Awk EstudioMarco MendozaAún no hay calificaciones
- Fundamentos de RadiaciónDocumento18 páginasFundamentos de RadiaciónEugenio CamarilloAún no hay calificaciones
- Calculo para La IngenieriaDocumento403 páginasCalculo para La IngenieriaF.W.100% (52)
- Fourier y Sus Coeficientes CanadaDocumento27 páginasFourier y Sus Coeficientes CanadaAshley BarrettAún no hay calificaciones
- Ciclos infinitos en Scratch para mover y cambiar un gato por siempreDocumento1 páginaCiclos infinitos en Scratch para mover y cambiar un gato por siempreDaniela RebolledoAún no hay calificaciones
- La Tecnología Informática Aplicada A Los Centros Escolares.Documento18 páginasLa Tecnología Informática Aplicada A Los Centros Escolares.Anahi LarreaAún no hay calificaciones
- Sentencias en C++Documento12 páginasSentencias en C++Harold Valle ReyesAún no hay calificaciones
- Monografia Criptografia ClasicaDocumento3 páginasMonografia Criptografia ClasicaStephanie BaptisteAún no hay calificaciones
- Tipos de AutomatizaciónDocumento8 páginasTipos de AutomatizaciónOrlando Zech RamosAún no hay calificaciones
- Tipos de SW y Base de DatosDocumento9 páginasTipos de SW y Base de DatosWilber Aldair Alegría100% (2)
- Presentación Esp Intro S4HANADocumento49 páginasPresentación Esp Intro S4HANAJhon MillonesAún no hay calificaciones
- Santa Cruz LAB02 Gestion de InstanciaDocumento7 páginasSanta Cruz LAB02 Gestion de InstanciaVictor Eugene Carrion BuendiaAún no hay calificaciones
- Trabajo de KaroDocumento7 páginasTrabajo de KaroFreddyAngelOrtizAún no hay calificaciones
- Investigacion DeadlockDocumento6 páginasInvestigacion DeadlockJorge HerreraAún no hay calificaciones
- Plan Anual Sistemas Informáticos Multiusuario y en RedDocumento2 páginasPlan Anual Sistemas Informáticos Multiusuario y en RedOscar Alban Fierro0% (1)
- Calendario Eventos Certificaciones Agosto-SeptiembreDocumento8 páginasCalendario Eventos Certificaciones Agosto-Septiembreyasmin riveraAún no hay calificaciones
- Introducción Al SPSS Alpha de CronbachDocumento6 páginasIntroducción Al SPSS Alpha de CronbachNestor Mendoza SuarezAún no hay calificaciones
- Lista de Chequeo Recoleccion de DatosDocumento4 páginasLista de Chequeo Recoleccion de DatosYan'k SekeaAún no hay calificaciones
- ErpDocumento2 páginasErpaliceAún no hay calificaciones
- Guia de Resolucion de Problemas PDFDocumento38 páginasGuia de Resolucion de Problemas PDFHEBLYN JOSE RODRIGUEZ UZCATEGUIAún no hay calificaciones
- BotonesLocosDocumento6 páginasBotonesLocosPadme CastroAún no hay calificaciones
- Catalogo LT8 & LT9 Español (3090 Rev. B ES)Documento2 páginasCatalogo LT8 & LT9 Español (3090 Rev. B ES)Fabian FabAún no hay calificaciones
- Betancourt Josafat ISC R3 U3Documento7 páginasBetancourt Josafat ISC R3 U3Josafat Alberto Betancourt LópezAún no hay calificaciones
- ActualizaDongle40Documento2 páginasActualizaDongle40Rafael Picco50% (2)
- Solis Andres Lab 2Documento17 páginasSolis Andres Lab 2Andres D SolisAún no hay calificaciones
- Como Elaborar Un Mapa ConceptualDocumento15 páginasComo Elaborar Un Mapa Conceptualjuliocc03Aún no hay calificaciones
- INFORME DE FEDORA DefinitivoDocumento30 páginasINFORME DE FEDORA DefinitivopianyfelixAún no hay calificaciones
- Trabajo 5 Modelo 2Documento6 páginasTrabajo 5 Modelo 2Alejandro MalagonAún no hay calificaciones
- TIC2 EVAREC Insumo1Documento5 páginasTIC2 EVAREC Insumo1haymimadreelbicho2022Aún no hay calificaciones
- La Guia DSDT II TM FixDocumento8 páginasLa Guia DSDT II TM FixHolman SolisAún no hay calificaciones
- AP01 AA2 EV05 Especificacion Requerimientos SIDocumento8 páginasAP01 AA2 EV05 Especificacion Requerimientos SIflecho flechas100% (1)
- Software para La Creación para La Creación de Imágenes FractalesDocumento4 páginasSoftware para La Creación para La Creación de Imágenes Fractaleslucero jacqueline covarrubias lorenzoAún no hay calificaciones
- Proceso de Matriculación V.4Documento1 páginaProceso de Matriculación V.4Byamnynn Z GícragAún no hay calificaciones