También podría gustarte
- catalogo-ProductosCEA 2017-2018 - Web PDFDocumento40 páginascatalogo-ProductosCEA 2017-2018 - Web PDFJose Espinoza RefrigeraciónAún no hay calificaciones
- MID 163. InmobilizadorDocumento32 páginasMID 163. InmobilizadorWilson Bueno100% (1)
- Catalogo Electronica y ServicioDocumento59 páginasCatalogo Electronica y ServicioSantiago Morales83% (6)
- Ficha Registro Instructivo InmuebleDocumento4 páginasFicha Registro Instructivo InmuebleCristian Tuqueres100% (1)
- Plan de MantenimientoDocumento5 páginasPlan de MantenimientoJuan Pablo Leguizamon CulmaAún no hay calificaciones
- Supletorio Control IIDocumento18 páginasSupletorio Control IIAnonymous phMkLfqd9IAún no hay calificaciones
- Maquina - CEG Guía Rápida Serie ACT Castellano2Documento11 páginasMaquina - CEG Guía Rápida Serie ACT Castellano2chekeque100% (1)
- MarilynCAPITULO IIIDocumento15 páginasMarilynCAPITULO IIIMarilyn GimenezAún no hay calificaciones
- SERRATRON 10iDocumento98 páginasSERRATRON 10imarazjoseAún no hay calificaciones
- Informe 2 Acumulador de Botellas PLCDocumento21 páginasInforme 2 Acumulador de Botellas PLCEnmanuel SalasAún no hay calificaciones
- Capítulo 2Documento13 páginasCapítulo 2ptinizarayAún no hay calificaciones
- MID 027 - CID 2200 - FMI 03: Localización y Solución de ProblemasDocumento8 páginasMID 027 - CID 2200 - FMI 03: Localización y Solución de Problemascriman45100% (1)
- Hoja de TrabajoDocumento3 páginasHoja de TrabajoFernando Merma CoaAún no hay calificaciones
- Mid 027 - Cid 0379 - Fmi 03Documento4 páginasMid 027 - Cid 0379 - Fmi 03mauricioAún no hay calificaciones
- USJ Trabajo Obligatorio AUTOMATASDocumento50 páginasUSJ Trabajo Obligatorio AUTOMATASRaulAún no hay calificaciones
- Informe Seguidor de LineaDocumento27 páginasInforme Seguidor de LineaNicko Vivar0% (1)
- Informe de Sika PeruDocumento34 páginasInforme de Sika Perujavier.llanos.r.1504Aún no hay calificaciones
- Analysis of Tension Calculation On Unwinder and RewinderDocumento39 páginasAnalysis of Tension Calculation On Unwinder and RewinderEdgard Medina GuevaraAún no hay calificaciones
- PSP-0008EE2B 2023/10/1 1 17:53:10-03:00 RENR9004 © 2023 Caterpillar IncDocumento7 páginasPSP-0008EE2B 2023/10/1 1 17:53:10-03:00 RENR9004 © 2023 Caterpillar IncIsrael MirandaAún no hay calificaciones
- Introduccion A Los ServomotoresDocumento14 páginasIntroduccion A Los ServomotoresL30N1Aún no hay calificaciones
- ESTUDIO TÉCNICO. Lavadoras PRODUCTO - GAMA - 600-800 - 1000-1300 Con Termostato Regulable. Fecha - 19 - 05 - 2004 Documento # - 4680Documento24 páginasESTUDIO TÉCNICO. Lavadoras PRODUCTO - GAMA - 600-800 - 1000-1300 Con Termostato Regulable. Fecha - 19 - 05 - 2004 Documento # - 4680ALFONZO DANIELAún no hay calificaciones
- Codigo P-30 (2688-8)Documento7 páginasCodigo P-30 (2688-8)YO MEROAún no hay calificaciones
- ITA 8.3, MVVV, Tarea 4, Parcial 2 ServomotorDocumento8 páginasITA 8.3, MVVV, Tarea 4, Parcial 2 ServomotorMarco Viera ValadezAún no hay calificaciones
- PSP-000456CF 2023/04/19 12:00:54-04:00 RSNR9848 © 2023 Caterpillar IncDocumento5 páginasPSP-000456CF 2023/04/19 12:00:54-04:00 RSNR9848 © 2023 Caterpillar IncMarvin MelendezAún no hay calificaciones
- Circuito Del Sensor de VelocidadDocumento11 páginasCircuito Del Sensor de Velocidadlalo11715Aún no hay calificaciones
- Actividad 4Documento9 páginasActividad 4Jerson 5Aún no hay calificaciones
- VELOCISTAPDFDocumento8 páginasVELOCISTAPDFEdie VaLenzAún no hay calificaciones
- Brazo RoboticoDocumento14 páginasBrazo RoboticolordarcanoAún no hay calificaciones
- Zafra 2021-2022Documento20 páginasZafra 2021-2022Guillermo Alfredo Palma RodríguezAún no hay calificaciones
- CKP CMPDocumento19 páginasCKP CMPAlvaro Zepeda100% (1)
- Zafra 2021-2022Documento19 páginasZafra 2021-2022Alfredo PalmaAún no hay calificaciones
- Implem. de Programación Basica Con PLC CompletoDocumento7 páginasImplem. de Programación Basica Con PLC CompletoKilly MontaroAún no hay calificaciones
- Manual Usuario Banda Guia RobotDocumento32 páginasManual Usuario Banda Guia RobotFranco DominguezAún no hay calificaciones
- 621E - Pruebas y Ajustes - Transmission SENR9122)Documento49 páginas621E - Pruebas y Ajustes - Transmission SENR9122)CEVegaO100% (1)
- Control EstacionamientoDocumento13 páginasControl EstacionamientoImanol Espinosa50% (2)
- 3 - Simoreg 6RA70PC BicoDocumento26 páginas3 - Simoreg 6RA70PC BicojairoAún no hay calificaciones
- Dossier 3004Documento28 páginasDossier 3004Willy MoralesAún no hay calificaciones
- Manual de Usuario Urpc Pcc-rss-50-Mma-39647 Proteccion Catodoca ColombiaDocumento15 páginasManual de Usuario Urpc Pcc-rss-50-Mma-39647 Proteccion Catodoca ColombiaDiego Fernando HenaoAún no hay calificaciones
- El Motor Virtual Automotriz Mva 4Documento10 páginasEl Motor Virtual Automotriz Mva 4Fernando Ardiles100% (2)
- Circuito de Suministro de 5 Voltios Al Sensor de Preseion Del Motor Probar.Documento17 páginasCircuito de Suministro de 5 Voltios Al Sensor de Preseion Del Motor Probar.Teo Sil Cas100% (3)
- Proyecto de AutomatizaciónDocumento20 páginasProyecto de AutomatizaciónDaninson CamachoAún no hay calificaciones
- Tacografo 1314Documento11 páginasTacografo 1314Edu HdezAún no hay calificaciones
- Seguidor de LineaDocumento16 páginasSeguidor de Linea'edgaar MoraleesAún no hay calificaciones
- Brazo Robotico Con AssemblerDocumento17 páginasBrazo Robotico Con Assemblerjuanmnauel1253168Aún no hay calificaciones
- User Manual HAT560N - HAT560NB - en - V1.1.en - EsDocumento29 páginasUser Manual HAT560N - HAT560NB - en - V1.1.en - EsOTIC RUIZ Y PAEZ100% (1)
- 5518 Meritorabs 0118 2ndDocumento6 páginas5518 Meritorabs 0118 2ndomar barajasAún no hay calificaciones
- Programacion GRAFCETDocumento7 páginasProgramacion GRAFCETcarlosjjj555Aún no hay calificaciones
- Examen Centrales 1pdf PDFDocumento3 páginasExamen Centrales 1pdf PDFmarcoleon2014Aún no hay calificaciones
- System Variables ManualDocumento16 páginasSystem Variables ManualÁlvaro Rodríguez CruzAún no hay calificaciones
- Mid 039 - Cid 0190 - Fmi 08 - 336d L Excavators M4t00001-UpDocumento5 páginasMid 039 - Cid 0190 - Fmi 08 - 336d L Excavators M4t00001-UpCEVegaOAún no hay calificaciones
- Spanish HX75 STV Oper (ID0689713 - 02 - SVC)Documento181 páginasSpanish HX75 STV Oper (ID0689713 - 02 - SVC)ismicicAún no hay calificaciones
- Kit de VibracionDocumento32 páginasKit de VibracionAlexVelasquezQAún no hay calificaciones
- Circuito Abierto o Corto Circuito de Sensor de Presión de Motor - ProbarDocumento11 páginasCircuito Abierto o Corto Circuito de Sensor de Presión de Motor - ProbarDavid SantosAún no hay calificaciones
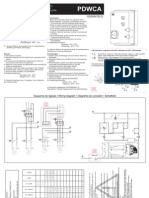
- WEG Instrucoes de Instalacao Pdwca 10000654785 Guia de Instalacao Portugues BRDocumento2 páginasWEG Instrucoes de Instalacao Pdwca 10000654785 Guia de Instalacao Portugues BRPaulo Luiz FrançaAún no hay calificaciones
- Servomecanismos o ServosistemasDocumento4 páginasServomecanismos o ServosistemasJorge Luis Orué92% (12)
- Pract2 DSMDocumento9 páginasPract2 DSMMiguel SalasAún no hay calificaciones
- Robot 1 PDFDocumento35 páginasRobot 1 PDFJois Lenny Mendoza LoayzaAún no hay calificaciones
- Serratron 10i 10st14spDocumento98 páginasSerratron 10i 10st14spjosemarazAún no hay calificaciones
- U1A3 Video SimulacionDocumento12 páginasU1A3 Video SimulacionDiego FavelaAún no hay calificaciones
- 100 circuitos de shields para arduino (español)De Everand100 circuitos de shields para arduino (español)Calificación: 3.5 de 5 estrellas3.5/5 (3)
- Reparación de instalaciones automatizadas. ELEE0109De EverandReparación de instalaciones automatizadas. ELEE0109Aún no hay calificaciones
- Curp Ealr071114mplsnba8Documento1 páginaCurp Ealr071114mplsnba8LEONARDO ESPAÑAAún no hay calificaciones
- Curp Eall910419hplsnn03Documento1 páginaCurp Eall910419hplsnn03LEONARDO ESPAÑAAún no hay calificaciones
- Cuestionario Sobre El Tema Selección de LubricantesDocumento1 páginaCuestionario Sobre El Tema Selección de LubricantesLEONARDO ESPAÑAAún no hay calificaciones
- 256950104371CFEDocumento2 páginas256950104371CFELEONARDO ESPAÑAAún no hay calificaciones
- La VenadasDocumento2 páginasLa VenadasLEONARDO ESPAÑAAún no hay calificaciones
- Lasvenadas LubiiiiDocumento2 páginasLasvenadas LubiiiiLEONARDO ESPAÑAAún no hay calificaciones
- Proyecto 1Documento2 páginasProyecto 1LEONARDO ESPAÑAAún no hay calificaciones
- La Pacificacion PorfirianaDocumento4 páginasLa Pacificacion PorfirianaLEONARDO ESPAÑAAún no hay calificaciones
- Curriculum-Vitae-Cronologico MejorDocumento1 páginaCurriculum-Vitae-Cronologico MejorLEONARDO ESPAÑAAún no hay calificaciones
- Rutina Nueva 2Documento1 páginaRutina Nueva 2LEONARDO ESPAÑAAún no hay calificaciones
- Antecedentes Del ProblemaDocumento1 páginaAntecedentes Del ProblemaLEONARDO ESPAÑAAún no hay calificaciones
- Programa 532008Documento2 páginasPrograma 532008Alejandro White PerMolAún no hay calificaciones
- 2° Libro NavideñosDocumento142 páginas2° Libro NavideñosMagaly M-f100% (1)
- Neurologia Del Amor - y - El Milagro Del AmorDocumento3 páginasNeurologia Del Amor - y - El Milagro Del AmormariaAún no hay calificaciones
- Unidad 4 CuestionarioDocumento6 páginasUnidad 4 CuestionariomaryAún no hay calificaciones
- Ingenieria de SistemasDocumento103 páginasIngenieria de SistemasFabiola Galvan Ramirez94% (36)
- Examen SeptiembreDocumento5 páginasExamen SeptiembreAntonio joseAún no hay calificaciones
- As-01 - Etimología, Objeto de Estudio, Concepto. GEOGRAFIA-22401436701-479520864Documento9 páginasAs-01 - Etimología, Objeto de Estudio, Concepto. GEOGRAFIA-22401436701-479520864Pamela Leslie Yucra ChavezAún no hay calificaciones
- Tarea 2Documento2 páginasTarea 2Luis Enrique Hernandez GilAún no hay calificaciones
- INTRODUCCION A La TEODocumento36 páginasINTRODUCCION A La TEOJames SmithAún no hay calificaciones
- Popayan - Vias PriorizadasDocumento101 páginasPopayan - Vias PriorizadasJUAN FELIPE BONILLA QUINTANAAún no hay calificaciones
- Resumen Historia de La ProgramaciónDocumento2 páginasResumen Historia de La Programacióneddier de jesus rodriguez mendozaAún no hay calificaciones
- CAUDALDocumento5 páginasCAUDALAlex RamírezAún no hay calificaciones
- Intervalos de ConfianzaDocumento6 páginasIntervalos de ConfianzaCaleb ZapataAún no hay calificaciones
- Quiz 3.2 (Nota 0)Documento6 páginasQuiz 3.2 (Nota 0)Yan Carlo Lozano CuriAún no hay calificaciones
- Tema 06Documento5 páginasTema 06Franco Tapia benitesAún no hay calificaciones
- Clase EnzimasDocumento42 páginasClase EnzimasDANIEL ALEJANDROAún no hay calificaciones
- DUARTE FLORES MICHEL ARMANDO - Actividad de Óxidos, Hidróxidos y ÁcidosDocumento6 páginasDUARTE FLORES MICHEL ARMANDO - Actividad de Óxidos, Hidróxidos y ÁcidosMichel DuarteAún no hay calificaciones
- Tabla de FrecuenciaDocumento4 páginasTabla de Frecuenciamaria sequeraAún no hay calificaciones
- Proyecto Octubre Noviembre y Diciembre NoelDocumento16 páginasProyecto Octubre Noviembre y Diciembre NoelEzequiel BohemiAún no hay calificaciones
- UntitledDocumento2 páginasUntitledsedrc gomezAún no hay calificaciones
- Propuesta AseoDocumento13 páginasPropuesta AseoJOHN JENNER BERMUDEZ OSPINAAún no hay calificaciones
- Diferencias Entre Paradigma Teorias Enfoques y Modelos Cuadro ComparativoDocumento7 páginasDiferencias Entre Paradigma Teorias Enfoques y Modelos Cuadro ComparativoFanny DuffAún no hay calificaciones
- Cap III ArchivosDocumento11 páginasCap III ArchivosJose MartinezAún no hay calificaciones
- Cuadros HistoriaDocumento2 páginasCuadros HistoriaMey CrispinAún no hay calificaciones
- Informe Tecnico Fabricacion de Cojinetes PDFDocumento5 páginasInforme Tecnico Fabricacion de Cojinetes PDFIsabel Cabudiva Acuña100% (1)
- NieblaDocumento2 páginasNieblaMara Dell'AversanaAún no hay calificaciones
- Tema N° 8: ADAN Y EVA: La Promesa (EL Kerigma)Documento4 páginasTema N° 8: ADAN Y EVA: La Promesa (EL Kerigma)Eduardo BedregalAún no hay calificaciones
- Poster PuentesDocumento1 páginaPoster PuentesAnonymous BegpaVe7Aún no hay calificaciones
- Induccion: Actividades Iniciales Fase de AnalisisDocumento4 páginasInduccion: Actividades Iniciales Fase de AnalisisivanAún no hay calificaciones