También podría gustarte
- 03G InversaGeneralizadaDeMoorePenroseDocumento33 páginas03G InversaGeneralizadaDeMoorePenrosemiguelm_295Aún no hay calificaciones
- Guía - Álgebra 2Documento3 páginasGuía - Álgebra 2sol estefani picon inquiltupaAún no hay calificaciones
- Álgebra Nivel A Práctica Super Semana 4-5-6-7-1Documento14 páginasÁlgebra Nivel A Práctica Super Semana 4-5-6-7-1Styx Grau GarouAún no hay calificaciones
- 1.leyes de ExponentesDocumento3 páginas1.leyes de ExponentesNobruAún no hay calificaciones
- Razones Trigonometricas - Materiales PreDocumento7 páginasRazones Trigonometricas - Materiales PreGabrielAún no hay calificaciones
- Ot21 Mar Trig3 M 1Documento4 páginasOt21 Mar Trig3 M 1Diego Sandoval LeytonAún no hay calificaciones
- FISICADocumento6 páginasFISICAjesusgranados257Aún no hay calificaciones
- Seminario 3Documento3 páginasSeminario 3anthony guillermo vilca vargasAún no hay calificaciones
- 4A-Pis 24-06-17Documento4 páginas4A-Pis 24-06-17Alfredo Sabino RamosAún no hay calificaciones
- MATRICESDocumento4 páginasMATRICESKary CahuanticoAún no hay calificaciones
- Repaso de Algebra UncpDocumento2 páginasRepaso de Algebra UncpJhon MonzonAún no hay calificaciones
- Raz. Matemático 01-04-2022Documento4 páginasRaz. Matemático 01-04-2022walberto ZeladaAún no hay calificaciones
- Repaso Unfv Algebra 2020Documento3 páginasRepaso Unfv Algebra 2020Anthony Aguilar BecerraAún no hay calificaciones
- G - AUNI - Dir - Sem 36Documento3 páginasG - AUNI - Dir - Sem 36Elizabeth Lucero Huanaco HuaytaAún no hay calificaciones
- Fijas TrigonometriaDocumento3 páginasFijas TrigonometriaRODRIGO MATIAS ROMAN SANCHEZAún no hay calificaciones
- Raz. Trigon. Angulos Agudos (Problemas)Documento2 páginasRaz. Trigon. Angulos Agudos (Problemas)JEAN CARLOS MATOS QUIJANDRIAAún no hay calificaciones
- Sistemas de Medidas AngularDocumento4 páginasSistemas de Medidas AngularAngelica ObandoAún no hay calificaciones
- Sintitul 2Documento24 páginasSintitul 2KevinKisshhPeraltaRiosAún no hay calificaciones
- Algebra Practica32Documento3 páginasAlgebra Practica32pipatrici.leivaAún no hay calificaciones
- Razones Trigonométricas de Ángulos Agudos Ii: ResoluciónDocumento8 páginasRazones Trigonométricas de Ángulos Agudos Ii: ResoluciónHarumi Causo MatzunagaAún no hay calificaciones
- Operadores Preuniversitario TrilceDocumento7 páginasOperadores Preuniversitario TrilceObeth DominguezAún no hay calificaciones
- Repaso N°1 - Pre 3Documento4 páginasRepaso N°1 - Pre 3Juan Telada MoránAún no hay calificaciones
- Teoría de Exponentes NIVEL II-4Documento4 páginasTeoría de Exponentes NIVEL II-4JESÚS MANUEL BARRIENTOS LAYMEAún no hay calificaciones
- Curso Virtual de WordDocumento6 páginasCurso Virtual de WordRoberto Ramos CastroAún no hay calificaciones
- 14 Razones Trigonometricas de Angulos AgudosDocumento3 páginas14 Razones Trigonometricas de Angulos AgudosPAUL JHERSON CARCAHUSTO TUMBILLOAún no hay calificaciones
- Tema 16 Radicales Dobles y RacionalizacionDocumento2 páginasTema 16 Radicales Dobles y RacionalizacionJoseph Antony Ascona MedinaAún no hay calificaciones
- 06 RT DE ANGULOS EN POSICION NORMAL ViernesDocumento4 páginas06 RT DE ANGULOS EN POSICION NORMAL ViernesWilber Ramos CartAún no hay calificaciones
- Trigonometría - ANUAL UNI - 2022 II - César VallejoDocumento54 páginasTrigonometría - ANUAL UNI - 2022 II - César VallejoOrlando Cabanillas SotoAún no hay calificaciones
- SM - Al - Leyes de ExponentesDocumento2 páginasSM - Al - Leyes de Exponenteszaul ramirez alcedoAún no hay calificaciones
- Repaso 1 CepuntDocumento3 páginasRepaso 1 Cepuntbrayan chuquimboquesAún no hay calificaciones
- Algebra 0Documento6 páginasAlgebra 0Paulina Casas ManríquezAún no hay calificaciones
- Angulos Multilples (Corregido)Documento8 páginasAngulos Multilples (Corregido)rolo1605Aún no hay calificaciones
- Material de Algebra 5to Secundaria ProductosDocumento2 páginasMaterial de Algebra 5to Secundaria ProductosBernabé Tigrepapi Juli AnchapuriAún no hay calificaciones
- Algebra Guia5Documento4 páginasAlgebra Guia5pipatrici.leivaAún no hay calificaciones
- TRIGOFORMATODocumento3 páginasTRIGOFORMATOJesús Cruz SilvaAún no hay calificaciones
- HT 1 MatricesDocumento2 páginasHT 1 MatricesMalu Acuña MptdAún no hay calificaciones
- Seminario 21Documento3 páginasSeminario 21eliasAún no hay calificaciones
- XG EX XTH Fracciones Operaciones Nivel IntermedioDocumento1 páginaXG EX XTH Fracciones Operaciones Nivel IntermedioSamuelAún no hay calificaciones
- Guía Introductorio Nº1 Intensivo SM (X)Documento3 páginasGuía Introductorio Nº1 Intensivo SM (X)Gilba Pinchi GarcíaAún no hay calificaciones
- Algebra Aseuni 1parteDocumento41 páginasAlgebra Aseuni 1parteBrayan YampierAún no hay calificaciones
- Acfrogbbknqjylxwro9pirk6zq 9yrxg0942ksczapyfpbuhycxrb0-Sgb7fhzfddxndl9hpe29jvd Xh9sg6ok4zaoodqflsxwvcb532a5tzxudfo91qqjrcatqlmwzxdpi8 Axzqo-Wb9e2 UpDocumento4 páginasAcfrogbbknqjylxwro9pirk6zq 9yrxg0942ksczapyfpbuhycxrb0-Sgb7fhzfddxndl9hpe29jvd Xh9sg6ok4zaoodqflsxwvcb532a5tzxudfo91qqjrcatqlmwzxdpi8 Axzqo-Wb9e2 Upmiguel angeito arcibia mendozaAún no hay calificaciones
- HT S2 Teoría Commaing - 2021Documento3 páginasHT S2 Teoría Commaing - 2021Rony ValdezAún no hay calificaciones
- X AUNI Dom Sem34Documento3 páginasX AUNI Dom Sem34Elizabeth Lucero Huanaco HuaytaAún no hay calificaciones
- 00 R.T. de Angulos NotablesDocumento3 páginas00 R.T. de Angulos NotablesChoi ChiwuAún no hay calificaciones
- 011 Matrices y DeterminantesDocumento5 páginas011 Matrices y DeterminantesDeivid RíosAún no hay calificaciones
- TrigoDocumento4 páginasTrigoDiego Ramos LamaAún no hay calificaciones
- TrigoDocumento4 páginasTrigoDiego Ramos LamaAún no hay calificaciones
- TrigonometriaDocumento5 páginasTrigonometriakevin espejoAún no hay calificaciones
- PR Dom Al Iuni 14Documento2 páginasPR Dom Al Iuni 14leodu2712Aún no hay calificaciones
- Razonamiento Matemática Banco de Preguntas de La UNA PUNODocumento49 páginasRazonamiento Matemática Banco de Preguntas de La UNA PUNOabel78% (9)
- Geometría Quinto.Documento5 páginasGeometría Quinto.Duverney Mendez BurgosAún no hay calificaciones
- p5 - Conteo de Fig, Op Mate y Trazado de FigDocumento19 páginasp5 - Conteo de Fig, Op Mate y Trazado de FigSamuelAún no hay calificaciones
- Operaciones Combinadas en R - 5 VirtualDocumento2 páginasOperaciones Combinadas en R - 5 VirtualEsteban Gutiérrez GabrielAún no hay calificaciones
- Trigonometria 09 CiDocumento4 páginasTrigonometria 09 CiZárate Villaizán Daniel JesúsAún no hay calificaciones
- Trigonometría 05 CNDocumento4 páginasTrigonometría 05 CNlizeth çAún no hay calificaciones
- PRÁCTICA-TRIGONOMETRÍA-sem I-CAT Verano 2024Documento2 páginasPRÁCTICA-TRIGONOMETRÍA-sem I-CAT Verano 2024tellojosepeAún no hay calificaciones
- Trigonometría 2009-IDocumento55 páginasTrigonometría 2009-Ilibrosguias ycompendiosAún no hay calificaciones
- HT - 01 - Matba - Ing - Vectores en El Espacio R3Documento6 páginasHT - 01 - Matba - Ing - Vectores en El Espacio R3José Bolívar PeraltaAún no hay calificaciones
- Geometric modeling in computer: Aided geometric designDe EverandGeometric modeling in computer: Aided geometric designAún no hay calificaciones
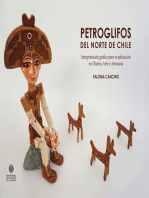
- Petroglifos del Norte de Chile: Interpretación gráfica para su aplicación en Diseño, Arte y Artesanía.De EverandPetroglifos del Norte de Chile: Interpretación gráfica para su aplicación en Diseño, Arte y Artesanía.Aún no hay calificaciones
- Lab 7. TempleDocumento6 páginasLab 7. Templedem priceAún no hay calificaciones
- Lab 13. UltrasonidoDocumento3 páginasLab 13. Ultrasonidodem priceAún no hay calificaciones
- MOTORESDocumento107 páginasMOTORESManuel100% (2)
- Respuesta Preguntas Modelo PerraultDocumento26 páginasRespuesta Preguntas Modelo Perraultdem priceAún no hay calificaciones
- Lab 15. Ensayo de ImpactoDocumento5 páginasLab 15. Ensayo de Impactodem priceAún no hay calificaciones
- Lab 12. Particulas MagnetizablesDocumento3 páginasLab 12. Particulas Magnetizablesdem priceAún no hay calificaciones
- Lab. Liquidos PenetrantesDocumento2 páginasLab. Liquidos Penetrantesdem priceAún no hay calificaciones
- Lab 14. ViscocidadDocumento3 páginasLab 14. Viscocidaddem priceAún no hay calificaciones
- Lab 8. RevenidoDocumento5 páginasLab 8. Revenidodem priceAún no hay calificaciones
- Lab 10. Examen VisualDocumento2 páginasLab 10. Examen Visualdem priceAún no hay calificaciones
- Lab 6. RecocidoDocumento1 páginaLab 6. Recocidodem priceAún no hay calificaciones
- DyFAC Examen FinalDocumento30 páginasDyFAC Examen Finaldem priceAún no hay calificaciones
- Lab 4 y 5. Dureza RockwellDocumento2 páginasLab 4 y 5. Dureza Rockwelldem priceAún no hay calificaciones
- Apunte Representación Gráfica - 2022v.2Documento124 páginasApunte Representación Gráfica - 2022v.2dem priceAún no hay calificaciones
- CNC Presentación FinalDocumento40 páginasCNC Presentación Finaldem priceAún no hay calificaciones
- Lab 3. Dureza BrinellDocumento1 páginaLab 3. Dureza Brinelldem priceAún no hay calificaciones
- CNC FINAL Los FracasadosDocumento30 páginasCNC FINAL Los Fracasadosdem priceAún no hay calificaciones
- Repaso de Vectores PDFDocumento8 páginasRepaso de Vectores PDFAugusto EspinozaAún no hay calificaciones
- Teoria de Rotura - JPDocumento6 páginasTeoria de Rotura - JPdem priceAún no hay calificaciones
- Unidad Nº2Documento6 páginasUnidad Nº2dem priceAún no hay calificaciones
- Unidad Nº3Documento12 páginasUnidad Nº3dem priceAún no hay calificaciones
- Unidad Nº4Documento27 páginasUnidad Nº4dem priceAún no hay calificaciones
- Unidad Nº9Documento7 páginasUnidad Nº9dem priceAún no hay calificaciones
- Unidad Nº1Documento4 páginasUnidad Nº1dem priceAún no hay calificaciones
- Problemas Resueltos - CalderasDocumento10 páginasProblemas Resueltos - Calderasdem priceAún no hay calificaciones
- Sevilla en 5 DiasDocumento29 páginasSevilla en 5 DiasPiloreAún no hay calificaciones
- Empresa Textil - PPDocumento16 páginasEmpresa Textil - PPRobin Christian Toranzo SanzAún no hay calificaciones
- PRÁCTICA 2. PROCESOSdocxDocumento5 páginasPRÁCTICA 2. PROCESOSdocxGabriela Alejandra Flores CanedoAún no hay calificaciones
- HFW 200 t6 EsDocumento6 páginasHFW 200 t6 EsCarlos José Barrios InfanteAún no hay calificaciones
- (Husserl Edmund) Logica Formal y Logica TranscendentalDocumento353 páginas(Husserl Edmund) Logica Formal y Logica TranscendentalAnonymous slVH85zY100% (2)
- Manual Cuestionario de Estres Postraumatico (Cep)Documento42 páginasManual Cuestionario de Estres Postraumatico (Cep)ANDRY JEFTHSSON SOLORZANO GUERRAAún no hay calificaciones
- MANUAL SMS ESABOL Septiembre 2019 PDFDocumento166 páginasMANUAL SMS ESABOL Septiembre 2019 PDFAndres Guzman GuzmanAún no hay calificaciones
- Ing Mec Aut AutoDocumento2 páginasIng Mec Aut AutoRoger Andres0% (1)
- Preguntas de La 1 A La 51 Con RespuestasDocumento12 páginasPreguntas de La 1 A La 51 Con RespuestasMaría FdezAún no hay calificaciones
- Grupo S-Tarea3.1.1Documento113 páginasGrupo S-Tarea3.1.1Ricardo OlmedoAún no hay calificaciones
- Dietas HospitalariasDocumento16 páginasDietas HospitalariasHeidy LauraAún no hay calificaciones
- Centro de Origen ChinoDocumento8 páginasCentro de Origen ChinoRebeca GonzalesmendietaAún no hay calificaciones
- E 43768Documento9 páginasE 43768AbrahamAún no hay calificaciones
- Doctrina de Satanas y Los DemoniosDocumento16 páginasDoctrina de Satanas y Los DemoniosANIBAL DELGADO100% (1)
- Problemas QuímicaDocumento2 páginasProblemas QuímicaDomi Saìjem ZenitramAún no hay calificaciones
- Alberti & Marshall (2009)Documento13 páginasAlberti & Marshall (2009)HernanAún no hay calificaciones
- Borrador MonografiaDocumento2 páginasBorrador MonografiaEl bato De la biciAún no hay calificaciones
- Partes de La MarimbaDocumento7 páginasPartes de La MarimbaSwitchfoot TiuAún no hay calificaciones
- Trabajo Final de Resistencia de Materiales en La Industria AlimentariaDocumento33 páginasTrabajo Final de Resistencia de Materiales en La Industria AlimentariaJAMERCCY VICTORIA100% (1)
- Retiro de Fin Año - Montañas de Prades - AmorsenyDocumento16 páginasRetiro de Fin Año - Montañas de Prades - AmorsenyAmorseny Albert NeusAún no hay calificaciones
- Instrumentación en FotometríaDocumento5 páginasInstrumentación en FotometríaBetty Lopez100% (1)
- Planificacion 23 de AbrilDocumento5 páginasPlanificacion 23 de AbrilDario TarifaAún no hay calificaciones
- 1-Estudios de Suelos y Cimentaciones Salon SocialDocumento58 páginas1-Estudios de Suelos y Cimentaciones Salon SocialFederico AriasAún no hay calificaciones
- Seminario Unidad 4Documento26 páginasSeminario Unidad 4María RodríguezAún no hay calificaciones
- 01 Documentación MercantilDocumento67 páginas01 Documentación MercantilLuisMiguelChambiApazaAún no hay calificaciones
- 351 400 PDFDocumento162 páginas351 400 PDFVICTOR MENDOZA PTT100% (1)
- Problemario Div Num DecDocumento2 páginasProblemario Div Num DecadonisedecAún no hay calificaciones
- JC MaxwellDocumento43 páginasJC Maxwellmaxwell_eulerAún no hay calificaciones
- 3reporte Clinico Miguel Ángel Ortiz Sánchez TERMINADODocumento14 páginas3reporte Clinico Miguel Ángel Ortiz Sánchez TERMINADOMiguel OrtizAún no hay calificaciones
- Importancia Del RenacimientoDocumento14 páginasImportancia Del RenacimientoJorge Lasprilla100% (1)