También podría gustarte
- Montaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109De EverandMontaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109Aún no hay calificaciones
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209De EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Calificación: 5 de 5 estrellas5/5 (2)
- Fuerza Motriz - 1a ParteDocumento17 páginasFuerza Motriz - 1a ParteEva GuerreroAún no hay calificaciones
- Motores de Corriente AlternaDocumento23 páginasMotores de Corriente AlternaCARLOS ALFREDO FRANCIS CABRERAAún no hay calificaciones
- Control de Motores IiDocumento62 páginasControl de Motores Iijox1106100% (2)
- Generadores AsíncronosDocumento9 páginasGeneradores Asíncronosjavier roman barba floresAún no hay calificaciones
- Hankel ElectrotecniaDocumento6 páginasHankel ElectrotecniaIng Johaan LlanzAún no hay calificaciones
- Cfe 03 MT Motores y Variadores de FrecuenciaDocumento48 páginasCfe 03 MT Motores y Variadores de FrecuenciaOscar RuizAún no hay calificaciones
- Estudios de MotoresDocumento8 páginasEstudios de MotoresDavid SuarezAún no hay calificaciones
- MotoresDocumento37 páginasMotoresSuishyAún no hay calificaciones
- Cuestionario Maquinas de CC Comple2Documento9 páginasCuestionario Maquinas de CC Comple2Moises Veyvidea100% (1)
- InfografíaDocumento1 páginaInfografíaAmador Sumano Guadalupe MayteAún no hay calificaciones
- Maquinas de Corriente AlternaDocumento8 páginasMaquinas de Corriente AlternaMarcos FlorezAún no hay calificaciones
- Actividad 1Documento13 páginasActividad 1Damaris Rios RodriguezAún no hay calificaciones
- Motores Marco TeoricoDocumento6 páginasMotores Marco Teoricomootaas100% (1)
- Motores Electricos 2020 1Documento15 páginasMotores Electricos 2020 1caisaAún no hay calificaciones
- 08 Motores y Generadores DCDocumento61 páginas08 Motores y Generadores DCLuis Alfredo Ventura RamosAún no hay calificaciones
- Máquina BLDCDocumento3 páginasMáquina BLDCeAún no hay calificaciones
- Cuestionario 6Documento15 páginasCuestionario 6Cristian HaroAún no hay calificaciones
- Correccion Del Factor de PotenciaDocumento10 páginasCorreccion Del Factor de PotenciaVega CèsarAún no hay calificaciones
- Guía de Ejercicios Prueba N°2 Máquinas Eléctricas 1-2023Documento11 páginasGuía de Ejercicios Prueba N°2 Máquinas Eléctricas 1-2023Sebastian DelgadoAún no hay calificaciones
- Caracteristicas Generales de Los MotoresDocumento5 páginasCaracteristicas Generales de Los Motoresfbvolcd100% (2)
- Motores de Corriente AlternaDocumento22 páginasMotores de Corriente AlternaJCarlos FigueroaAún no hay calificaciones
- Motores Eléctricos de Alta EficienciaDocumento23 páginasMotores Eléctricos de Alta EficienciaGelbert Gely Anton SalazarAún no hay calificaciones
- Unidad 4Documento34 páginasUnidad 4Anonymous 397iJDBWAún no hay calificaciones
- Motores de InduccionDocumento15 páginasMotores de InduccionKarelis Castellanos MarquezAún no hay calificaciones
- Motores SincrónicosDocumento13 páginasMotores SincrónicosLuzmeli ÑambreAún no hay calificaciones
- Plantas generadoras de electricidad, motores de corriente directa e indirectaDocumento12 páginasPlantas generadoras de electricidad, motores de corriente directa e indirectaJavier MuñozAún no hay calificaciones
- Motores de Corriente AlternaDocumento16 páginasMotores de Corriente AlternaMiguel RosalesAún no hay calificaciones
- Modelos y curvas de motores eléctricosDocumento14 páginasModelos y curvas de motores eléctricosjose loveraAún no hay calificaciones
- Tema 1 Maquinas Electricas.Documento45 páginasTema 1 Maquinas Electricas.Role 1521Aún no hay calificaciones
- Lab 2Documento15 páginasLab 2Jesus GomezAún no hay calificaciones
- FinalDocumento3 páginasFinalCarlos SiesquenAún no hay calificaciones
- Clasificación de pérdidas en máquinas eléctricas: cobre, núcleo, mecánicas y adicionalesDocumento3 páginasClasificación de pérdidas en máquinas eléctricas: cobre, núcleo, mecánicas y adicionalesJosé AleAún no hay calificaciones
- (Mantenimiento A Motores C.D.) : (Fecha)Documento11 páginas(Mantenimiento A Motores C.D.) : (Fecha)Dimas RamirezAún no hay calificaciones
- 1.3. Análisis de la fuerza contraelectromotriz en el motor: contraelectromotriz (fcem, ε') y se mideDocumento4 páginas1.3. Análisis de la fuerza contraelectromotriz en el motor: contraelectromotriz (fcem, ε') y se mideRodrigo Camacho IbarraAún no hay calificaciones
- Motor DC TecsupDocumento43 páginasMotor DC TecsupJeffry Cr PaJar PonCe50% (2)
- M SincronoDocumento11 páginasM Sincrono18200076Aún no hay calificaciones
- ElectricaDocumento6 páginasElectricaAngel AlvaradoAún no hay calificaciones
- Motores de inducción: clasificación, aplicaciones y funcionamientoDocumento19 páginasMotores de inducción: clasificación, aplicaciones y funcionamientoDarwin AlvaradoAún no hay calificaciones
- Motores DCDocumento4 páginasMotores DCGerardo PastoreAún no hay calificaciones
- Motores Electricos - Información PDFDocumento21 páginasMotores Electricos - Información PDFLUIS CARLOS ANGULO CAROAún no hay calificaciones
- 6.1 Caracteristica Velocidad Contra ParDocumento16 páginas6.1 Caracteristica Velocidad Contra ParEiter Antonio Santiago0% (1)
- Operación y características de máquinas síncronas y generadores en paraleloDocumento53 páginasOperación y características de máquinas síncronas y generadores en paralelolabakaaAún no hay calificaciones
- Colegio Vocacional Monseñor SanabriaDocumento17 páginasColegio Vocacional Monseñor SanabriaCristopher MartinezAún no hay calificaciones
- FCEM DC motorDocumento6 páginasFCEM DC motorFhernando GarciaAún no hay calificaciones
- Taller Evaluativo MOTORES Y GENERADORES DE CORRIENTE DIRECTADocumento18 páginasTaller Evaluativo MOTORES Y GENERADORES DE CORRIENTE DIRECTADavid Alejandro Diaz RinconAún no hay calificaciones
- Motor de Inducción TrifásicoDocumento10 páginasMotor de Inducción TrifásicoEdwin Santiago Villegas AuquesAún no hay calificaciones
- Motor universalDocumento6 páginasMotor universalsimon sosaAún no hay calificaciones
- Motores eléctricos: tipos, funcionamiento y regulación de velocidadDocumento68 páginasMotores eléctricos: tipos, funcionamiento y regulación de velocidadRICARDO ANDRES ARANIBAR YOVERAAún no hay calificaciones
- MagnetismoDocumento3 páginasMagnetismosebastianAún no hay calificaciones
- ManuelDocumento4 páginasManuelEMMANUEL VASQUEZ SAN PEDROAún no hay calificaciones
- CARACTERISTICAS DE MOTORES CC o CD InformeDocumento6 páginasCARACTERISTICAS DE MOTORES CC o CD InformeAlvaro LCAún no hay calificaciones
- Motores Electricos para La IndustriaDocumento15 páginasMotores Electricos para La IndustriaReyder CiezaAún no hay calificaciones
- Maquinas ElectricasDocumento12 páginasMaquinas ElectricaspilarAún no hay calificaciones
- Motores de Corriente Alterna 1Documento17 páginasMotores de Corriente Alterna 1Edwin Iban Flores AguirreAún no hay calificaciones
- Rebobinado de Motores 2Documento41 páginasRebobinado de Motores 2David SerranoAún no hay calificaciones
- Práctica #8 Arranque Del Motor de C.A. PolifásicoDocumento18 páginasPráctica #8 Arranque Del Motor de C.A. PolifásicoFernando GarzónAún no hay calificaciones
- Cuestionario MSDocumento2 páginasCuestionario MSMau Chavez BoetaAún no hay calificaciones
- UF1217 - Mantenimiento de sistemas auxiliares del motor de ciclo dieselDe EverandUF1217 - Mantenimiento de sistemas auxiliares del motor de ciclo dieselCalificación: 3.5 de 5 estrellas3.5/5 (3)
- Naranja y Marrón Fresco Mandarinas Video para Dispositivos MóvilesDocumento1 páginaNaranja y Marrón Fresco Mandarinas Video para Dispositivos MóvilesEva RodriguezAún no hay calificaciones
- Actividad 3 InfografiaDocumento1 páginaActividad 3 InfografiaEva RodriguezAún no hay calificaciones
- Portada para Practicas-1Documento4 páginasPortada para Practicas-1Eva RodriguezAún no hay calificaciones
- Infografía Lista de Records Del Baloncesto Limpio Simple Blanco y NegroDocumento1 páginaInfografía Lista de Records Del Baloncesto Limpio Simple Blanco y NegroEva RodriguezAún no hay calificaciones
- Laidi Zuñiga Guerrero Asesor Interno Mtro. Eleazar Campero ÁngelesDocumento122 páginasLaidi Zuñiga Guerrero Asesor Interno Mtro. Eleazar Campero ÁngelesEva RodriguezAún no hay calificaciones
- Cedula Futbol 7Documento1 páginaCedula Futbol 7Eva RodriguezAún no hay calificaciones
- Efemerides - Hoja 2Documento1 páginaEfemerides - Hoja 2Eva RodriguezAún no hay calificaciones
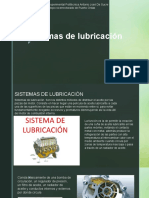
- Lubricacion 2.1Documento13 páginasLubricacion 2.1cuentaAún no hay calificaciones
- Ing. Chavez ChacaltanaDocumento55 páginasIng. Chavez ChacaltanaJorgeLuisTejadaLopezAún no hay calificaciones
- Folleto ExtintoresDocumento2 páginasFolleto Extintoresjulio trejosAún no hay calificaciones
- AMEF Unidad Contra IncendioDocumento8 páginasAMEF Unidad Contra IncendioBenjaminAún no hay calificaciones
- Raymundo Méndez Escamilla Mapa Conceptual TermodinámicaDocumento1 páginaRaymundo Méndez Escamilla Mapa Conceptual TermodinámicaRay MndzAún no hay calificaciones
- Laboratorio de Química General 01Documento6 páginasLaboratorio de Química General 01Matamoros De La Cruz JorgeAún no hay calificaciones
- Ensayo 1 Medio Montessori AgostoDocumento18 páginasEnsayo 1 Medio Montessori AgostoMaría TemucoAún no hay calificaciones
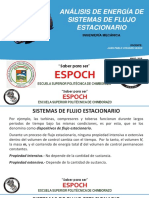
- 2.2 Analisis de Sistemas Estacionarios - PresentacionDocumento19 páginas2.2 Analisis de Sistemas Estacionarios - PresentacionJairo Iván TierraAún no hay calificaciones
- Catálogo general de equipos para grandes cargasDocumento108 páginasCatálogo general de equipos para grandes cargasricktmgAún no hay calificaciones
- Libro UrbanismoDocumento5 páginasLibro UrbanismopachoAún no hay calificaciones
- Cambios de Estado de La MateriaDocumento14 páginasCambios de Estado de La MateriaSebastian AlurraldeAún no hay calificaciones
- Greivin Salas Portafolio 03FON Casa de Habitación MamposteríaDocumento4 páginasGreivin Salas Portafolio 03FON Casa de Habitación MamposteríaMario Ivan GudiñoAún no hay calificaciones
- Ev 1 Economia OkDocumento25 páginasEv 1 Economia OksantiagoAún no hay calificaciones
- 8.1.4-927 Echo - Bilámpara LED - Energy Saving ESLDocumento1 página8.1.4-927 Echo - Bilámpara LED - Energy Saving ESLjoseAún no hay calificaciones
- EcologíaDocumento31 páginasEcologíaJhon HoyosAún no hay calificaciones
- D7R PDFDocumento3 páginasD7R PDFLytmerAcuñaAún no hay calificaciones
- andrea ultimo limpieza de casasDocumento4 páginasandrea ultimo limpieza de casasandreaAún no hay calificaciones
- NRF 011 Cfe 2012Documento9 páginasNRF 011 Cfe 2012AXEL OMAR SANCHEZAún no hay calificaciones
- Que Es Isomeros de Cadena y Que Es Isomeros de PosiciónDocumento11 páginasQue Es Isomeros de Cadena y Que Es Isomeros de PosiciónDigna Ticona100% (1)
- Diagnóstico y cambio de correa de distribuciónDocumento13 páginasDiagnóstico y cambio de correa de distribuciónbenjaminAún no hay calificaciones
- Informe de ReacondicionamientoDocumento7 páginasInforme de ReacondicionamientoCarlosDeConnoAún no hay calificaciones
- Lavadora Assento 380 PLDocumento36 páginasLavadora Assento 380 PLDennyBenitez75% (4)
- Proyecto EmprendedorDocumento12 páginasProyecto EmprendedorBertha Morales PinedaAún no hay calificaciones
- Andes PrácticaDocumento4 páginasAndes PrácticaPlinio ÁlvaroAún no hay calificaciones
- Hidratos Del Gas Natural PDFDocumento127 páginasHidratos Del Gas Natural PDFAlvaro Boris Vallejos CortezAún no hay calificaciones
- Marketing Verde o EcologicoDocumento17 páginasMarketing Verde o EcologicoJuan Kmilo Angulo Paez100% (1)
- Tiempo para La Vida-RiechmannDocumento46 páginasTiempo para La Vida-RiechmannEdgar León100% (1)
- Hacia Una Geopolítica Del MarDocumento8 páginasHacia Una Geopolítica Del MarWilmer ContrerasAún no hay calificaciones