También podría gustarte
- Primer Prodcuto Backus Dap Dop (Cuzqueña)Documento5 páginasPrimer Prodcuto Backus Dap Dop (Cuzqueña)Vanessita FernándezAún no hay calificaciones
- Memoria ExplicativaDocumento9 páginasMemoria ExplicativaHANS MACAYAAún no hay calificaciones
- 123 Michoacán Investigaciones RecientesDocumento83 páginas123 Michoacán Investigaciones RecientesRocko20100% (2)
- Guia Capitulo IDocumento26 páginasGuia Capitulo Irrcuello88% (8)
- Tema 05 Cinemática de FluidosDocumento31 páginasTema 05 Cinemática de FluidosKATIA PAOLA MEZA CAHUANAAún no hay calificaciones
- Aplicación de La Derivada A Otras ÁreasDocumento22 páginasAplicación de La Derivada A Otras ÁreasblackadanadrielAún no hay calificaciones
- U2 - 0 - Analisis Diferencial Del Movimiento de FluidosDocumento53 páginasU2 - 0 - Analisis Diferencial Del Movimiento de FluidosAgostina fAún no hay calificaciones
- Mecánica de Fluidos Unidad 3 NTVDocumento62 páginasMecánica de Fluidos Unidad 3 NTVANDRE CORREA HRZICAún no hay calificaciones
- Unidad 3b - Ecuaciones Diferenciales Del Movimiento de FluidosDocumento41 páginasUnidad 3b - Ecuaciones Diferenciales Del Movimiento de FluidosAriel DuarteAún no hay calificaciones
- Cinematica de FluidosDocumento102 páginasCinematica de FluidosPablo.MAún no hay calificaciones
- Cinematica de Los Fluidos - WordDocumento32 páginasCinematica de Los Fluidos - WordGénesis LambertAún no hay calificaciones
- Leccion 17 MomentoDocumento14 páginasLeccion 17 MomentoMauricio GuerreroAún no hay calificaciones
- Unidad-1 Tecnicas Aerodinamicas - Ecuaciones BasicasDocumento55 páginasUnidad-1 Tecnicas Aerodinamicas - Ecuaciones BasicasUriel LópezAún no hay calificaciones
- 600 909 1 PBDocumento10 páginas600 909 1 PBjorge ticona lopezAún no hay calificaciones
- Dinamica de FluidosDocumento36 páginasDinamica de Fluidosivan felipe erazo ceronAún no hay calificaciones
- Cinemática de FluidosDocumento7 páginasCinemática de FluidosoudvÑOUVSBÑUOVBOAún no hay calificaciones
- Capitulo 3 (Cinematica de Fluidos)Documento24 páginasCapitulo 3 (Cinematica de Fluidos)Liliana CabreraAún no hay calificaciones
- Word 7Documento49 páginasWord 7Santos Raul Tocto TomapascaAún no hay calificaciones
- Introducción Cinemática de La PartículaDocumento29 páginasIntroducción Cinemática de La PartículaJaiyim villalobosAún no hay calificaciones
- Relatividad EspecialDocumento23 páginasRelatividad EspecialEscarlet Leticia Puebla LizanaAún no hay calificaciones
- 8 Cinemática-Primera - ParteDocumento8 páginas8 Cinemática-Primera - ParteIng-Hernán Gómez Msc-PhdAún no hay calificaciones
- Problemas Resueltos de Electrostatica y MagnetostaticaDocumento122 páginasProblemas Resueltos de Electrostatica y MagnetostaticaBorja Cascon PaivaAún no hay calificaciones
- SMF-02 - DinamicaDocumento20 páginasSMF-02 - DinamicaGustavo Edgardo GilAún no hay calificaciones
- Cap Iv Dinamica FluidosDocumento47 páginasCap Iv Dinamica FluidosluisAún no hay calificaciones
- Clase 9 Capitulo3 HidrocinematicaDocumento16 páginasClase 9 Capitulo3 HidrocinematicaHomar Chaupis SarmientoAún no hay calificaciones
- Cap4 PDFDocumento33 páginasCap4 PDFJonathan FajardoAún no hay calificaciones
- Tema 05 Cinemática de FluidosDocumento31 páginasTema 05 Cinemática de FluidosDennis Pando HuertaAún no hay calificaciones
- Word Calculo 4Documento21 páginasWord Calculo 4Martin Zoto MezaAún no hay calificaciones
- CinemA!tica y Dina!mica de La P - VelA!squez Medrano, GermA!n (Aut PDFDocumento217 páginasCinemA!tica y Dina!mica de La P - VelA!squez Medrano, GermA!n (Aut PDFMateos JA50% (2)
- Mecánica de Fluidos - Flujo Convectivo y Ecuac ContinuidadDocumento11 páginasMecánica de Fluidos - Flujo Convectivo y Ecuac ContinuidadRafaelAún no hay calificaciones
- Tema 3 Fluidos en MovimientoDocumento17 páginasTema 3 Fluidos en Movimientopepe sanchezAún no hay calificaciones
- HIDROCINEMATICADocumento26 páginasHIDROCINEMATICAJoZee GiaNcarloo Aguilar MoranteAún no hay calificaciones
- Ecuaciones Diferenciales PDFDocumento32 páginasEcuaciones Diferenciales PDFFernando RiosAún no hay calificaciones
- Fluidos 1Documento3 páginasFluidos 1jesus.espAún no hay calificaciones
- CAPITULO VI. - Teoria Cinetica de Los Gases-II - TERMODINAMICA PDFDocumento22 páginasCAPITULO VI. - Teoria Cinetica de Los Gases-II - TERMODINAMICA PDFEstefano Maximo FloresAún no hay calificaciones
- Capitulo 3 (Cinematica de Fluidos)Documento24 páginasCapitulo 3 (Cinematica de Fluidos)Ramirez Chinche Jose LuisAún no hay calificaciones
- 24758Documento22 páginas24758JOSE MANUEL TORIZ RUELASAún no hay calificaciones
- Cinematica Hh223iclases PresentacionDocumento77 páginasCinematica Hh223iclases PresentacionSEBASTIAN ALONSO CHAVEZ UTRILLAAún no hay calificaciones
- Cap 2 Espacios VectorialesDocumento6 páginasCap 2 Espacios VectorialesJhon RíosAún no hay calificaciones
- NavierDocumento13 páginasNavierKelly Guevara MosqueraAún no hay calificaciones
- EcuacuionDocumento47 páginasEcuacuionmarlonAún no hay calificaciones
- Nuevo Cap2 Parte 1Documento29 páginasNuevo Cap2 Parte 1Britani Zurita RequeAún no hay calificaciones
- Frank M. Whithe Cap 4Documento64 páginasFrank M. Whithe Cap 4Edilberto Estevez TroncosoAún no hay calificaciones
- Aplicación de La Derivada A Otras ÁreasDocumento22 páginasAplicación de La Derivada A Otras ÁreasKarianaSmitterAún no hay calificaciones
- Mecanica de Fluidos IIDocumento37 páginasMecanica de Fluidos IIingridAún no hay calificaciones
- Fisica ResumenDocumento145 páginasFisica Resumenerlantz sanchezAún no hay calificaciones
- Fenómenos TurbulentosDocumento30 páginasFenómenos TurbulentosAnaAcuñaMontezaAún no hay calificaciones
- Deducción de La Ecuación de BernoulliDocumento9 páginasDeducción de La Ecuación de BernoulliEdin Ronaldo Peña BermeoAún no hay calificaciones
- Separata 2Documento11 páginasSeparata 2EnriqueAzabacheDiosesAún no hay calificaciones
- Tiempo de Vaciado de TanqueDocumento15 páginasTiempo de Vaciado de TanqueJessica Cristina Navarro Ravelo100% (2)
- CAPITULO VI. - Teoria Cinetica de Los Gases-II - TERMODINAMICA PDFDocumento22 páginasCAPITULO VI. - Teoria Cinetica de Los Gases-II - TERMODINAMICA PDFMaribel Alvarez QuispeAún no hay calificaciones
- Capítulo 10 Texto FTDocumento53 páginasCapítulo 10 Texto FTMarco Antonio Cervantes SacachipanaAún no hay calificaciones
- Dinamica de Fluidos 19-42Documento25 páginasDinamica de Fluidos 19-42Edgar RamirezAún no hay calificaciones
- Tema 1 IntroduccionDocumento13 páginasTema 1 Introduccionpepe sanchezAún no hay calificaciones
- 4 Ecuaciones de Variacion de CDMDocumento28 páginas4 Ecuaciones de Variacion de CDMNico CaloAún no hay calificaciones
- P1 Lab DinámicaDocumento14 páginasP1 Lab DinámicaVictoria BarraganAún no hay calificaciones
- GuiaMecanicaClasica PDFDocumento19 páginasGuiaMecanicaClasica PDFRobin GallegoAún no hay calificaciones
- PR Actica de Combusti On 2: Variables y Ecuaciones en Mec Anica de FluidosDocumento13 páginasPR Actica de Combusti On 2: Variables y Ecuaciones en Mec Anica de Fluidosgonzi44444Aún no hay calificaciones
- Tema 3Documento41 páginasTema 3Pablo SegarraAún no hay calificaciones
- Ecuación de Volumen de Control - Conservación de MasaDocumento10 páginasEcuación de Volumen de Control - Conservación de Masalenin olazabal100% (1)
- Momentos de velocidad: Capturando la dinámica: conocimientos sobre la visión por computadoraDe EverandMomentos de velocidad: Capturando la dinámica: conocimientos sobre la visión por computadoraAún no hay calificaciones
- Anexo 6 - Formulário de DTMDocumento1 páginaAnexo 6 - Formulário de DTMLucas OliveraAún no hay calificaciones
- Trabajo Práctico #2a - Bombas CentrífugasDocumento6 páginasTrabajo Práctico #2a - Bombas CentrífugasLucas OliveraAún no hay calificaciones
- Trabajo Práctico #2b - Bombas CentrífugasDocumento9 páginasTrabajo Práctico #2b - Bombas CentrífugasLucas OliveraAún no hay calificaciones
- A.B - U.5 Distribución de PoissonDocumento6 páginasA.B - U.5 Distribución de PoissonLucas OliveraAún no hay calificaciones
- Reemplazo Gases Refrigerantes - Manual DUPONTDocumento19 páginasReemplazo Gases Refrigerantes - Manual DUPONTLucas OliveraAún no hay calificaciones
- TACUMSEHDocumento3 páginasTACUMSEHLucas OliveraAún no hay calificaciones
- Ejemplo IncertidumbreDocumento7 páginasEjemplo IncertidumbreLucas OliveraAún no hay calificaciones
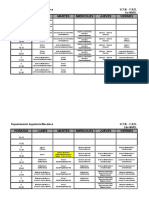
- Horarios 2021 INGENIERIA MECANICADocumento5 páginasHorarios 2021 INGENIERIA MECANICALucas OliveraAún no hay calificaciones
- SP 2020-11-06Documento6 páginasSP 2020-11-06Lucas OliveraAún no hay calificaciones
- DIN 76 Salidas de RoscaDocumento2 páginasDIN 76 Salidas de RoscaLucas OliveraAún no hay calificaciones
- Programa Prevencion de Riesgos MPCDocumento11 páginasPrograma Prevencion de Riesgos MPCJuan Pablo HidalgoAún no hay calificaciones
- Planificación Estratégica en Las Pimi de VenezuelaDocumento184 páginasPlanificación Estratégica en Las Pimi de VenezuelaErnewmanAún no hay calificaciones
- Semana 3 InformáticaDocumento40 páginasSemana 3 InformáticaVal Maverick100% (1)
- Boletín Estadísticas Eléctricas No.22 Año 2020Documento228 páginasBoletín Estadísticas Eléctricas No.22 Año 2020Jorge Luis Recinos ClarosAún no hay calificaciones
- ApuntesDocumento4 páginasApuntesjennifervp1991Aún no hay calificaciones
- Ficha Tecnica Gesapax 500 SCDocumento2 páginasFicha Tecnica Gesapax 500 SCJulieta TaveraAún no hay calificaciones
- PLAN Mantenimiento Industrial 351100002 13Documento2 páginasPLAN Mantenimiento Industrial 351100002 13Arturo RamírezAún no hay calificaciones
- Colegio San Miguel Arcangel - 6TO AÑO-PLANIFICACION - 2024Documento8 páginasColegio San Miguel Arcangel - 6TO AÑO-PLANIFICACION - 2024Javier AcevedoAún no hay calificaciones
- Teoria de Juegos Capitulo 2Documento15 páginasTeoria de Juegos Capitulo 2IFMG0015540Aún no hay calificaciones
- Consulta Frutas Mermelada y BocadilloDocumento14 páginasConsulta Frutas Mermelada y BocadilloNiris VirgüezAún no hay calificaciones
- Caso Marcopolo VFDocumento3 páginasCaso Marcopolo VFneyuid1360% (10)
- Infografía Algunas Cosas Que Puedes Hacer en Tu Tiempo Libre Divertido Ilustrado Sticker AzulDocumento1 páginaInfografía Algunas Cosas Que Puedes Hacer en Tu Tiempo Libre Divertido Ilustrado Sticker Azullaura SalasAún no hay calificaciones
- Desarrollo Organizacional: Técnicas / TDODocumento3 páginasDesarrollo Organizacional: Técnicas / TDOtorcatt0% (2)
- INSTRUCCIÓN 2022 02 Régimen Transitorio RLISTA (Firmada)Documento15 páginasINSTRUCCIÓN 2022 02 Régimen Transitorio RLISTA (Firmada)bymodeAún no hay calificaciones
- Tipos de EmbarqueDocumento8 páginasTipos de Embarquesolamistad75% (4)
- Determinants of Attitude Towards and Purchase Intention of Private Label Brands in EcuadorRevista Venezolana de GerenciaDocumento18 páginasDeterminants of Attitude Towards and Purchase Intention of Private Label Brands in EcuadorRevista Venezolana de GerenciaOscar CardenasAún no hay calificaciones
- TEMA 2 Equipos Principales de Subestaciones de PotenciaDocumento71 páginasTEMA 2 Equipos Principales de Subestaciones de PotenciaPablo FernandezAún no hay calificaciones
- Resumen Teoria Del Estado - Derecho UbaDocumento23 páginasResumen Teoria Del Estado - Derecho Ubaleguizamon051Aún no hay calificaciones
- Lección 06 - El Método de Teología PrácticaDocumento6 páginasLección 06 - El Método de Teología PrácticaMIGUEL DIOGENES RAMOS RODRIGUEZAún no hay calificaciones
- Motor DiéselDocumento7 páginasMotor DiéselJuan GarcíaAún no hay calificaciones
- Tarea 1. Conceptos.Documento8 páginasTarea 1. Conceptos.Jorge JimenezAún no hay calificaciones
- Gojman, M. (1994) La Historia, Una Reflexión Sobre El Pasado. Un Compromiso Con El Futuro PDFDocumento11 páginasGojman, M. (1994) La Historia, Una Reflexión Sobre El Pasado. Un Compromiso Con El Futuro PDFRamon SoriaAún no hay calificaciones
- Formato para Registro de Becarios A ProyectosDocumento2 páginasFormato para Registro de Becarios A ProyectosRocio Diaz TrujanoAún no hay calificaciones
- Dermatitis Por ContactoDocumento3 páginasDermatitis Por ContactoFlorecitas estudiosasAún no hay calificaciones
- Centro Local: ARAGUA-Oficina de Apoyo - Asignatura: Sistemas de Información - Código:606Documento11 páginasCentro Local: ARAGUA-Oficina de Apoyo - Asignatura: Sistemas de Información - Código:606Maria isabel Chirinos carrilloAún no hay calificaciones
- AfectividadDocumento6 páginasAfectividadDARY HMOAún no hay calificaciones
- CAVASDocumento2 páginasCAVASLaura SalazarAún no hay calificaciones