También podría gustarte
- Tunel Hidraulica - EstructurasDocumento37 páginasTunel Hidraulica - EstructurasRichard Conde100% (6)
- Ingeniería química. Soluciones a los problemas del tomo IDe EverandIngeniería química. Soluciones a los problemas del tomo IAún no hay calificaciones
- Calculo de Esfuerzo EfectivoDocumento8 páginasCalculo de Esfuerzo Efectivoresidentevil1234Aún no hay calificaciones
- Amca2011 69 Tema5Documento6 páginasAmca2011 69 Tema5cesar eafaelAún no hay calificaciones
- Geometric modeling in computer: Aided geometric designDe EverandGeometric modeling in computer: Aided geometric designAún no hay calificaciones
- Doctor Agreda - ConminuciónDocumento32 páginasDoctor Agreda - ConminuciónWalter Edinson Ramos Chavez100% (1)
- Problemas resueltos de Hidráulica de CanalesDe EverandProblemas resueltos de Hidráulica de CanalesCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Analisis de La Capa Limite Viscosa y Capa LímiteDocumento13 páginasAnalisis de La Capa Limite Viscosa y Capa LímiteFredy Jhonny Mio PuertaAún no hay calificaciones
- Sistemas de puesta a tierra: Diseñado con IEEE-80 y evaluado con MEFDe EverandSistemas de puesta a tierra: Diseñado con IEEE-80 y evaluado con MEFCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Modelado de La Compactacion Por ExplosivDocumento5 páginasModelado de La Compactacion Por Explosivtabla fmAún no hay calificaciones
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoDe EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoCalificación: 4.5 de 5 estrellas4.5/5 (12)
- PUCP Aplicación Del Metodo de Los Elementos Finitos de Una Tapa Semi ElipticaDocumento8 páginasPUCP Aplicación Del Metodo de Los Elementos Finitos de Una Tapa Semi ElipticamaqueyraAún no hay calificaciones
- Anillo Circular A CompresiónDocumento20 páginasAnillo Circular A CompresiónCarlos PamplonaAún no hay calificaciones
- Prototipos ElásticosDocumento23 páginasPrototipos ElásticosOtorthen ManzizAún no hay calificaciones
- Simulador de Flujo Monofásico Petróleo Gauss SeidelDocumento24 páginasSimulador de Flujo Monofásico Petróleo Gauss SeidelKeren Yesenia RinconAún no hay calificaciones
- Esfuerzos en Soportes Tanques Horizontales PDFDocumento4 páginasEsfuerzos en Soportes Tanques Horizontales PDFJulio EsparzaAún no hay calificaciones
- Taller 03 Eval Numérica y Espectro de Respuesta ESPOLDocumento5 páginasTaller 03 Eval Numérica y Espectro de Respuesta ESPOLSteeven CampoverdeAún no hay calificaciones
- CordovaDocumento16 páginasCordovaKevinAún no hay calificaciones
- Trabajo Final de Metodos - EsgeDocumento61 páginasTrabajo Final de Metodos - EsgeEpa AlexAún no hay calificaciones
- Dra. Maika Gambus - Simulacion de Yacimientos PDFDocumento38 páginasDra. Maika Gambus - Simulacion de Yacimientos PDFAlexanderZon BlackMountainAún no hay calificaciones
- Tarea 2. Teoria de Consolidacion y Asentamiento y Teoria Sobre Presiones y Empujes ActivosDocumento24 páginasTarea 2. Teoria de Consolidacion y Asentamiento y Teoria Sobre Presiones y Empujes ActivosBarbara pintiAún no hay calificaciones
- TP 1 2018 Analisis DimensionalDocumento6 páginasTP 1 2018 Analisis Dimensionalmartin danielAún no hay calificaciones
- Entrega 2 Grupo 2 PDFDocumento32 páginasEntrega 2 Grupo 2 PDFEduards Moises Triviño Vildósola100% (1)
- 2020 TP - Analisis DimensionalDocumento5 páginas2020 TP - Analisis DimensionalRomina CastilloAún no hay calificaciones
- Sistema Electro-Mecánico OscilanteDocumento9 páginasSistema Electro-Mecánico OscilanteGerardoDuranAún no hay calificaciones
- ClasetunelesaaDocumento10 páginasClasetunelesaaÁlvaroo LVAún no hay calificaciones
- Aplicaciones de Los Métodos Numéricos en La IngenieríaDocumento6 páginasAplicaciones de Los Métodos Numéricos en La IngenieríaJose Miguel ArancibiaAún no hay calificaciones
- Mecanica de FluidosDocumento11 páginasMecanica de FluidosAlejandra Acosta JaramilloAún no hay calificaciones
- Practica ElvisDocumento5 páginasPractica ElvisMARTÍNEZ SOTO GISELAAún no hay calificaciones
- Analisis de DuanmicaDocumento11 páginasAnalisis de DuanmicaABDIEL ARMANDO GUIDO MEZAAún no hay calificaciones
- Solucion Numerica de La Ecuación de DifusionDocumento15 páginasSolucion Numerica de La Ecuación de DifusioncarlosAún no hay calificaciones
- Lab Control ListoDocumento24 páginasLab Control ListojihyeonmineAún no hay calificaciones
- Simulacion Numerica Del Comportamiento de Hormigones Previamente Expuestos A Altas TemperaturasDocumento6 páginasSimulacion Numerica Del Comportamiento de Hormigones Previamente Expuestos A Altas TemperaturasEduarIvanFernandezVasquezAún no hay calificaciones
- Lab 5 HSAPDocumento14 páginasLab 5 HSAPSofia RubianoAún no hay calificaciones
- InformeDocumento42 páginasInformeSergio Marcos SanteroAún no hay calificaciones
- Tarea 4 - Mecanica de SuelosDocumento7 páginasTarea 4 - Mecanica de SuelosSeba PeraltaAún no hay calificaciones
- Modulo I - Recuperatorio - Mecanismos y Elementos de Maquinas 2020 - Tema 4Documento2 páginasModulo I - Recuperatorio - Mecanismos y Elementos de Maquinas 2020 - Tema 4Gabriel Alberto Villalobos RamosAún no hay calificaciones
- Dueñas Flores Marco 2° PC Pi 524 ADocumento7 páginasDueñas Flores Marco 2° PC Pi 524 AMarco Dueñas FloresAún no hay calificaciones
- Memoria de Cálculo Malla de Tierra en Baja TenciónDocumento11 páginasMemoria de Cálculo Malla de Tierra en Baja TenciónMiguel RuizAún no hay calificaciones
- 6.guía Virtual - Condensadores - SEMANA6Documento12 páginas6.guía Virtual - Condensadores - SEMANA6Dari DuarteAún no hay calificaciones
- 13-Mecanica de Fluidos-17 PDFDocumento20 páginas13-Mecanica de Fluidos-17 PDFagra_77Aún no hay calificaciones
- Pandeo Teoria 2012 MecDocumento42 páginasPandeo Teoria 2012 MecGonzalo LopezAún no hay calificaciones
- Cuestionario PEC2!16!17 Estela JordaDocumento11 páginasCuestionario PEC2!16!17 Estela JordaestelaAún no hay calificaciones
- ALETASDocumento23 páginasALETASDiego AlejandroAún no hay calificaciones
- Análisis Plástico de Flexión. Rótula Plástica. Trabajo VirtualDocumento22 páginasAnálisis Plástico de Flexión. Rótula Plástica. Trabajo VirtualoswaldoAún no hay calificaciones
- RsiDocumento57 páginasRsiRafaelAlvaradoNùñezAún no hay calificaciones
- Fisuras Termicas Masivo ModeloDocumento7 páginasFisuras Termicas Masivo ModeloCarlos GuerraAún no hay calificaciones
- 04 Recipientes de Paredes DelgadasDocumento9 páginas04 Recipientes de Paredes DelgadasMiguel Paats67% (3)
- Analisis Sismico de PresasDocumento45 páginasAnalisis Sismico de PresasmapasabcAún no hay calificaciones
- Mecánica de Suelos Moderna: Diplomado en Geotecnia - UmsaDocumento4 páginasMecánica de Suelos Moderna: Diplomado en Geotecnia - UmsaFelix Omar Orias SalasAún no hay calificaciones
- Diseño de Túneles - UNSADocumento36 páginasDiseño de Túneles - UNSAAngel Farfán CruzAún no hay calificaciones
- ParcialDocumento3 páginasParcialJuan Diego CarvajalAún no hay calificaciones
- Mecánica de Fluidos - Semej FisicaDocumento13 páginasMecánica de Fluidos - Semej FisicaRafaelAún no hay calificaciones
- Serie 6, Jorge Compean Castillo, Mec. de Suelos TeoricaDocumento10 páginasSerie 6, Jorge Compean Castillo, Mec. de Suelos TeoricaJorge CompeanAún no hay calificaciones
- SMY Equipo05 PDocumento29 páginasSMY Equipo05 PFabian ruiz sanchezAún no hay calificaciones
- Canal Rugosidad CompuestaDocumento6 páginasCanal Rugosidad CompuestaAngelAún no hay calificaciones
- Coeficiente de Pandeo para Placas Anulares Con Espesor VariableDocumento8 páginasCoeficiente de Pandeo para Placas Anulares Con Espesor VariableRodolfo Antonio Buchapi CortezAún no hay calificaciones
- Caracterización Dinamica de Los Materiales La Alhambra EspañaDocumento11 páginasCaracterización Dinamica de Los Materiales La Alhambra EspañaJulio CapdevilaAún no hay calificaciones
- Calavera MDCDocumento254 páginasCalavera MDCVictor Hugo Vallejos VillarroelAún no hay calificaciones
- Revista Estoa Vol 9Documento106 páginasRevista Estoa Vol 9Julio CapdevilaAún no hay calificaciones
- Arquitectura en Las Montañas. Construcción Con Tierra en Nazareno Velz 2018Documento19 páginasArquitectura en Las Montañas. Construcción Con Tierra en Nazareno Velz 2018Julio CapdevilaAún no hay calificaciones
- DOCUMENTO - CLASIFICACIÓN DE SUELOS - SantamarinaDocumento18 páginasDOCUMENTO - CLASIFICACIÓN DE SUELOS - SantamarinaAlejandra Rojas MontañaAún no hay calificaciones
- El Caso de La Esquina Rota y Otros Problemas Constructivos Trill y BowyerDocumento168 páginasEl Caso de La Esquina Rota y Otros Problemas Constructivos Trill y BowyerJulio CapdevilaAún no hay calificaciones
- Art EC7 Geotecnia 149 2020 J EstaireDocumento21 páginasArt EC7 Geotecnia 149 2020 J EstaireJulio CapdevilaAún no hay calificaciones
- Resumen La Evaluación de Los AprendizajesDocumento2 páginasResumen La Evaluación de Los AprendizajesJulio CapdevilaAún no hay calificaciones
- Fracaso EscolarDocumento38 páginasFracaso EscolarPaulina SotoAún no hay calificaciones
- EvaluacionDocumento43 páginasEvaluacionJudith PalominoAún no hay calificaciones
- Criterios de EvaluacionDocumento7 páginasCriterios de EvaluacionJulio CapdevilaAún no hay calificaciones
- 20 Paradojas de La Evaluación SANTOS GUERRA PDFDocumento24 páginas20 Paradojas de La Evaluación SANTOS GUERRA PDFClaudia CarrancaAún no hay calificaciones
- Guia Del Buen ConductorDocumento24 páginasGuia Del Buen ConductorMartin Gallardo0% (1)
- El Oficio de Ser EstudianteDocumento12 páginasEl Oficio de Ser Estudiantemirian sotoAún no hay calificaciones
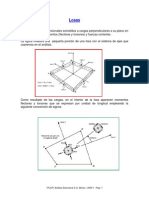
- Analisis de Losas PDFDocumento4 páginasAnalisis de Losas PDFJulio LoayzaAún no hay calificaciones
- Catastrofes en GeotecniaDocumento80 páginasCatastrofes en GeotecniaJorge PerezAún no hay calificaciones
- Tablas Diseno Losas MacizasDocumento5 páginasTablas Diseno Losas MacizasCesar Antileo OrtegaAún no hay calificaciones
- TABLAS Kalmanok PDFDocumento23 páginasTABLAS Kalmanok PDFJulio CapdevilaAún no hay calificaciones
- NCH 1508 Of. 2008 - Geotecnia - Estudios de Mecánica de Suelos y FundacionesDocumento25 páginasNCH 1508 Of. 2008 - Geotecnia - Estudios de Mecánica de Suelos y FundacionesDante Alejandro Rodriguez Valdes94% (17)
- Ensayo de Penetracion Estandar (SPT)Documento26 páginasEnsayo de Penetracion Estandar (SPT)Christopher Diaz100% (3)
- Progreso en ArgentinaDocumento1 páginaProgreso en ArgentinaJulio CapdevilaAún no hay calificaciones
- PilotesymicropilotesDocumento32 páginasPilotesymicropilotesCarlos QuimAún no hay calificaciones
- 04 SuelosnsDocumento53 páginas04 SuelosnsRomina Hidalgo VegaAún no hay calificaciones
- Coeficientes de BalastroDocumento30 páginasCoeficientes de Balastrosebasuq100% (5)
- 2 - Proceso de CristalizaciónDocumento34 páginas2 - Proceso de CristalizaciónBren AcAún no hay calificaciones
- Canals VidalDocumento7 páginasCanals VidalDavid AgustínAún no hay calificaciones
- Cuestionario Del 8 Al 14 PolaridadDocumento3 páginasCuestionario Del 8 Al 14 Polaridadanon_857665753Aún no hay calificaciones
- Diagramas Hombre MaquinaDocumento64 páginasDiagramas Hombre MaquinaDenis VargasAún no hay calificaciones
- Pruebas Evaluativas BoxeoDocumento23 páginasPruebas Evaluativas BoxeoYOEL MEDINAAún no hay calificaciones
- ApasionateDocumento5 páginasApasionateTello Uribe100% (1)
- Presentacion Enfermedad de ChagasDocumento9 páginasPresentacion Enfermedad de ChagasFrancisco Carrillo BrenesAún no hay calificaciones
- Cultivos Naturales o ArtificialesDocumento4 páginasCultivos Naturales o ArtificialesFernando Bernal DiazAún no hay calificaciones
- Starter Kit 3 CastellanoDocumento28 páginasStarter Kit 3 CastellanoDanivalguzAún no hay calificaciones
- Trabjo 1 Fase 5Documento9 páginasTrabjo 1 Fase 5dayana gonzalesAún no hay calificaciones
- Leccion 1.5Documento35 páginasLeccion 1.5Rish Ardson0% (3)
- Preguntas Del ForoDocumento4 páginasPreguntas Del ForoValentina DueñezAún no hay calificaciones
- Proyecto de Complementación HumanaDocumento5 páginasProyecto de Complementación HumanaH Fernando BlasónAún no hay calificaciones
- XML2PDFDocumento1 páginaXML2PDFPatricia LetelierAún no hay calificaciones
- La Industria de La MaderaDocumento16 páginasLa Industria de La MaderaMarjorie Pame Solano BuenoAún no hay calificaciones
- Informe Tecnico Tanque A.C.P.M. Los ÁngelesDocumento8 páginasInforme Tecnico Tanque A.C.P.M. Los ÁngeleskamAún no hay calificaciones
- Guía Financiera Interactiva - CD PDFDocumento22 páginasGuía Financiera Interactiva - CD PDFJavier100% (1)
- Guia Estudio I Potencial de Membrana y Potencial de AccionDocumento9 páginasGuia Estudio I Potencial de Membrana y Potencial de AccionMinastauriel AlassëaAún no hay calificaciones
- 3 Fisica Electricidad y Magnetismo 2018-2 PDFDocumento8 páginas3 Fisica Electricidad y Magnetismo 2018-2 PDFmanuelperdomotAún no hay calificaciones
- EscamolesDocumento7 páginasEscamolesstephany PérezAún no hay calificaciones
- Tarea Preparatoria 1 ParcialDocumento3 páginasTarea Preparatoria 1 ParcialAnonymous R7sLmJPhPAún no hay calificaciones
- 1 TonDocumento10 páginas1 TonEdgar Alejandro Barajas RuizAún no hay calificaciones
- Tarifa FERLUX MAYO 2021-22 (R6)Documento20 páginasTarifa FERLUX MAYO 2021-22 (R6)Tío Matt El ViajeroAún no hay calificaciones
- Cotizacion TRIPLE A 26 - 1Documento1 páginaCotizacion TRIPLE A 26 - 1irvin calixAún no hay calificaciones
- DegluciónDocumento42 páginasDegluciónconejagpaAún no hay calificaciones
- Licencia Ambiental Puente PDFDocumento136 páginasLicencia Ambiental Puente PDFNATALIA RENDON100% (1)
- Para Enamorar A RuthDocumento13 páginasPara Enamorar A RuthAndenes CHILLITUPAAún no hay calificaciones
- TheLook Julio 2023 - Ecatalog SSDocumento124 páginasTheLook Julio 2023 - Ecatalog SSCristina MolinaAún no hay calificaciones
- Triptico Cultura ChiripaDocumento2 páginasTriptico Cultura ChiripaMayra ChoqueAún no hay calificaciones
- TrabajoDocumento6 páginasTrabajodanielchancusig4Aún no hay calificaciones
- La magia de los números: 136 recreaciones aritméticas y geométricasDe EverandLa magia de los números: 136 recreaciones aritméticas y geométricasCalificación: 1 de 5 estrellas1/5 (1)
- SIG de la A a la Z: Diccionario ilustrado de los sistemas de información geográficaDe EverandSIG de la A a la Z: Diccionario ilustrado de los sistemas de información geográficaCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Matemáticas básicas para economistas. Vol. 0. Fundamentos (Con notas históricas y contextos económicos)De EverandMatemáticas básicas para economistas. Vol. 0. Fundamentos (Con notas históricas y contextos económicos)Aún no hay calificaciones
- Introducción a la geometría (2ª edición)De EverandIntroducción a la geometría (2ª edición)Calificación: 5 de 5 estrellas5/5 (1)
- La engañosa sencillez de los triángulos: De la fórmula de Herón a la criptografíaDe EverandLa engañosa sencillez de los triángulos: De la fórmula de Herón a la criptografíaAún no hay calificaciones
- Transformaciones en geometría euclidiana y no euclidianaDe EverandTransformaciones en geometría euclidiana y no euclidianaAún no hay calificaciones
- UF0306 - Análisis de datos y representación de planosDe EverandUF0306 - Análisis de datos y representación de planosAún no hay calificaciones
- Sobre Nilálgebras Conmutativas de Potencias AsociativasDe EverandSobre Nilálgebras Conmutativas de Potencias AsociativasAún no hay calificaciones
- La ecuación general de segundo grado en dos y tres variablesDe EverandLa ecuación general de segundo grado en dos y tres variablesAún no hay calificaciones