También podría gustarte
- Fundamento Teórico Ley de HookeDocumento6 páginasFundamento Teórico Ley de HookeLiliana Sandoval100% (1)
- Examen Final Mecatronica AutomotrizDocumento6 páginasExamen Final Mecatronica AutomotrizLuis Muñoz Chilingano67% (3)
- Eolica 3Documento40 páginasEolica 3David Mauricio ForeroAún no hay calificaciones
- Ogata - 5ta Sistemas Dinamicos MecanicosDocumento17 páginasOgata - 5ta Sistemas Dinamicos MecanicosJosue BarreraAún no hay calificaciones
- La ecuación general de segundo grado en dos y tres variablesDe EverandLa ecuación general de segundo grado en dos y tres variablesAún no hay calificaciones
- Analisis Estructural-Jairo Uribe Escamilla-166-201Documento36 páginasAnalisis Estructural-Jairo Uribe Escamilla-166-201PilarOrta100% (1)
- Ejercicios Resueltos Vigas 2Documento46 páginasEjercicios Resueltos Vigas 2fernando0561100% (2)
- INFORME de Martillo Schmidt y El Equipo de Carga PuntualDocumento15 páginasINFORME de Martillo Schmidt y El Equipo de Carga PuntualAnjhelo Alvarez PonteAún no hay calificaciones
- Problemas Resueltos Estatica 2faseDocumento33 páginasProblemas Resueltos Estatica 2faseMilesca ECAún no hay calificaciones
- Bachelard Gaston - Psicoanalisis Del FuegoDocumento90 páginasBachelard Gaston - Psicoanalisis Del Fuegonavehugo8190100% (20)
- Ejercicios Estatica 2Documento6 páginasEjercicios Estatica 2Emilio Jose Pavon LedesmaAún no hay calificaciones
- Capitulo 02 Sistemas Con Un Grado de Libertad PDFDocumento102 páginasCapitulo 02 Sistemas Con Un Grado de Libertad PDFAntonyG.MorenoAún no hay calificaciones
- AMORTIGUADORESDocumento6 páginasAMORTIGUADORESjotaAún no hay calificaciones
- CApitulo 3Documento8 páginasCApitulo 3ferAún no hay calificaciones
- Ingeniería de Control ModernaDocumento14 páginasIngeniería de Control ModernaEdwin AmayaAún no hay calificaciones
- Ogata Páginas 176 187Documento12 páginasOgata Páginas 176 187Lenin Fabian Gutierrez OsorioAún no hay calificaciones
- Ejercicio A-3 9 Ingenieria-De-Control-Moderna-Ogata-5ed PDFDocumento3 páginasEjercicio A-3 9 Ingenieria-De-Control-Moderna-Ogata-5ed PDFOskarAún no hay calificaciones
- P3 OgataDocumento3 páginasP3 OgataantoniooballegarciaAún no hay calificaciones
- EjerDocumento38 páginasEjerLuismi TRAún no hay calificaciones
- MELDocumento3 páginasMELEnrique De Jesus BaltazarAún no hay calificaciones
- 10.9 Metodo de La Viga ConjugadaDocumento13 páginas10.9 Metodo de La Viga Conjugadalestat_95Aún no hay calificaciones
- Combinacion de Resortes. Serie, ParaleloDocumento6 páginasCombinacion de Resortes. Serie, ParalelochinoadanAún no hay calificaciones
- P2 OgataDocumento3 páginasP2 OgataantoniooballegarciaAún no hay calificaciones
- Elementos Finitos Cap1.3 p2Documento12 páginasElementos Finitos Cap1.3 p2Henry HoyosAún no hay calificaciones
- Teor Cap 2 Tecnicas ArrollamientoDocumento13 páginasTeor Cap 2 Tecnicas ArrollamientoOliver Gálvez ZavaletaAún no hay calificaciones
- Lineas en Regimen Permanente DesequilibradoDocumento20 páginasLineas en Regimen Permanente DesequilibradoAdrian Arturo Yampa GuerraAún no hay calificaciones
- Vibraciones ForzadasDocumento9 páginasVibraciones Forzadasjoneth1g.1mostaceroAún no hay calificaciones
- Tarea de F-Sica I 30 - Enero - 2024Documento6 páginasTarea de F-Sica I 30 - Enero - 2024Jhazeel Zuloaga QuioAún no hay calificaciones
- Circuito Equivalente de Un Parlante - GiradorDocumento12 páginasCircuito Equivalente de Un Parlante - GiradorNachoMeijideAún no hay calificaciones
- Tres Momenyos y Angulo de Giro y Deflexion Uribe EscamillaDocumento36 páginasTres Momenyos y Angulo de Giro y Deflexion Uribe EscamillaSantiago MuñozAún no hay calificaciones
- Ingeniería de Control Moderna: Figura 3-26Documento4 páginasIngeniería de Control Moderna: Figura 3-26Fernando Paez MendizabalAún no hay calificaciones
- U02 4 Eso Fisica y QuimicaDocumento27 páginasU02 4 Eso Fisica y QuimicafernandoAún no hay calificaciones
- Tranformadores ParaleloDocumento12 páginasTranformadores ParalelojesusAún no hay calificaciones
- TEma 7-2 Parte2-MinDocumento15 páginasTEma 7-2 Parte2-MinAlberto GarcíaAún no hay calificaciones
- Expar 1Documento2 páginasExpar 1Dante Ali Vilchez SanchezAún no hay calificaciones
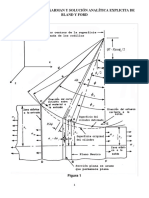
- Ecuación de Von Karman y Solución Analítica Explicita de Bland y FordDocumento14 páginasEcuación de Von Karman y Solución Analítica Explicita de Bland y FordJose EAún no hay calificaciones
- Fracciones, Exponenetes y Exponentes Fraccionarios PDFDocumento19 páginasFracciones, Exponenetes y Exponentes Fraccionarios PDFYeny PazAún no hay calificaciones
- Trabajo de Control AutomáticoDocumento20 páginasTrabajo de Control Automáticophoenix eastwoodAún no hay calificaciones
- I1 Iee2613 2016 1Documento4 páginasI1 Iee2613 2016 1DeatSoulAún no hay calificaciones
- Resolucion TP - FUNCION - TRANSFERENCIA - PLANO - COMPLEJODocumento20 páginasResolucion TP - FUNCION - TRANSFERENCIA - PLANO - COMPLEJOElíasJuliánAún no hay calificaciones
- UNIDAD 1.semana1-Clase2JDocumento13 páginasUNIDAD 1.semana1-Clase2JJair PaucarAún no hay calificaciones
- Elasticidad: 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 A B C DDocumento5 páginasElasticidad: 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 A B C DKevin Paul Aguilar ChamaAún no hay calificaciones
- Resolucion de Circuitos Trifasicos (Modo de AdDocumento44 páginasResolucion de Circuitos Trifasicos (Modo de AdatreyunAún no hay calificaciones
- Triple Producto VectorialDocumento5 páginasTriple Producto VectorialKaren Alejandra López AlvarezAún no hay calificaciones
- Chopra Condensación EstáticaDocumento3 páginasChopra Condensación EstáticaBeatriz Diaz CaballeroAún no hay calificaciones
- 3 Sistema en PuDocumento6 páginas3 Sistema en PuRamon Alfredo Aballay ArceAún no hay calificaciones
- CAPITULO 2 CorregidoDocumento12 páginasCAPITULO 2 CorregidoAlvaro ClarosAún no hay calificaciones
- Energia Especifica en Canales FinalDocumento19 páginasEnergia Especifica en Canales FinalErwinBertBellidoAñancaAún no hay calificaciones
- Vibración Libre Con Amortiguamiento ViscosoDocumento5 páginasVibración Libre Con Amortiguamiento ViscosoAnthony MelendreAún no hay calificaciones
- 06 EjerciciosDocumento49 páginas06 EjerciciostefakrrilloAún no hay calificaciones
- MT227 EP 2015 1 SolDocumento5 páginasMT227 EP 2015 1 SolFritzDeepAún no hay calificaciones
- Diseño de Dos Factores de Dos Bloques 2017Documento26 páginasDiseño de Dos Factores de Dos Bloques 2017Erick TejadaAún no hay calificaciones
- RRPV Triángulo Rect.Documento16 páginasRRPV Triángulo Rect.Jose Luis Nava HernandezAún no hay calificaciones
- Libro Final de Fluidos Leccion 14 Energia-BombasDocumento10 páginasLibro Final de Fluidos Leccion 14 Energia-BombasWeimar Jurado GonzalesAún no hay calificaciones
- Analisis de Datos U5Documento15 páginasAnalisis de Datos U5JOSE PABLO CARREON MERAZAún no hay calificaciones
- Ac 201824133708Documento6 páginasAc 201824133708Henry Escorcia AhumadaAún no hay calificaciones
- Sintesis - Deformaciones en Barras - Giro RelativoDocumento7 páginasSintesis - Deformaciones en Barras - Giro RelativoIña ElizaldeAún no hay calificaciones
- M. Doble Integración PDFDocumento21 páginasM. Doble Integración PDFLuis BryanAún no hay calificaciones
- Kin PointDocumento122 páginasKin PointHector S. MajiAún no hay calificaciones
- Cinemática de La PartículaDocumento102 páginasCinemática de La PartículaRepositorio MantenimientoAún no hay calificaciones
- Práctica 06 Ley de Ohm y Resistencia de ConductoresDocumento9 páginasPráctica 06 Ley de Ohm y Resistencia de ConductoresGabriel DBAún no hay calificaciones
- 2012 Primera Prueba de Autoevalución de Campos y Ondas 2012-13 Con SolucionesDocumento4 páginas2012 Primera Prueba de Autoevalución de Campos y Ondas 2012-13 Con SolucionesJavier Solís FernándezAún no hay calificaciones
- 4 Clase #4 - Tema 2Documento8 páginas4 Clase #4 - Tema 2DanielaAún no hay calificaciones
- Capitulo 4 (1-8)Documento14 páginasCapitulo 4 (1-8)Ivan Rondinel BulejeAún no hay calificaciones
- Lista de Precios REPDocumento30 páginasLista de Precios REPNv CisnerosAún no hay calificaciones
- Clase 2Documento113 páginasClase 2Nv CisnerosAún no hay calificaciones
- CLases No 3 Trifasicos Ideal 2da ParteDocumento6 páginasCLases No 3 Trifasicos Ideal 2da ParteNv CisnerosAún no hay calificaciones
- CLases No 3 Trifasicos IdealDocumento18 páginasCLases No 3 Trifasicos IdealNv CisnerosAún no hay calificaciones
- Apu 2Documento66 páginasApu 2Nv CisnerosAún no hay calificaciones
- Manuale Di Istruzioni RSM-RSA MonobloccoDocumento50 páginasManuale Di Istruzioni RSM-RSA MonobloccoNv CisnerosAún no hay calificaciones
- Nanofibras de CarbonoDocumento1 páginaNanofibras de CarbonoNv CisnerosAún no hay calificaciones
- Motores de Inducción PDFDocumento15 páginasMotores de Inducción PDFAdolfo A HerreraAún no hay calificaciones
- IshikawaDocumento21 páginasIshikawaNv CisnerosAún no hay calificaciones
- Introducción A La Dinámica de Sistemas by DanyDocumento22 páginasIntroducción A La Dinámica de Sistemas by DanyLuis Picho QuishpeAún no hay calificaciones
- Librodeproyectosdearduinostarterkit 151212174250 PDFDocumento174 páginasLibrodeproyectosdearduinostarterkit 151212174250 PDFdbarrio2011Aún no hay calificaciones
- José de Espronceda - PoesíasDocumento14 páginasJosé de Espronceda - PoesíasIamcsqAún no hay calificaciones
- Guia EjemplosDocumento59 páginasGuia EjemplosjennybelenAún no hay calificaciones
- Tipos de Armaduras 2Documento4 páginasTipos de Armaduras 2William Fernando Mera LopezAún no hay calificaciones
- Historiadelecuador PDFDocumento56 páginasHistoriadelecuador PDFNv CisnerosAún no hay calificaciones
- Motores de Inducción PDFDocumento15 páginasMotores de Inducción PDFAdolfo A HerreraAún no hay calificaciones
- Guia para La Eleccion Del Tipo de Acero en Estructuras PDFDocumento3 páginasGuia para La Eleccion Del Tipo de Acero en Estructuras PDFrmqkrdAún no hay calificaciones
- Practica N°2 Labfis IiDocumento5 páginasPractica N°2 Labfis IiCESAR RODRIGUEZ VALLEJOSAún no hay calificaciones
- Sistema de Ecuaciones DiferencialesDocumento15 páginasSistema de Ecuaciones DiferencialesRovlaAún no hay calificaciones
- Física Actividad IIDocumento18 páginasFísica Actividad IIjonathan ricoAún no hay calificaciones
- Capítulo 8 - TornillosDocumento31 páginasCapítulo 8 - TornillosAdrian RodríguezAún no hay calificaciones
- Curso/ Clase Facultad Asunto Docente Carrera Fila Unidad Tema Tipo - 1Documento5 páginasCurso/ Clase Facultad Asunto Docente Carrera Fila Unidad Tema Tipo - 1KRISTY YENIFER LOPEZ SOLONAún no hay calificaciones
- ENERGÍADocumento26 páginasENERGÍAElioAguilarFLoresAún no hay calificaciones
- BigSky EspañolDocumento30 páginasBigSky EspañolNehemías Romero PérezAún no hay calificaciones
- Grupo A - P5Documento8 páginasGrupo A - P5Miguel GarcíaAún no hay calificaciones
- Codigo de TrabajoDocumento4 páginasCodigo de TrabajoAntonio RamírezAún no hay calificaciones
- Ejercicos Fisica.Documento2 páginasEjercicos Fisica.lisbeth PilatasigAún no hay calificaciones
- Problemas Resueltos Tema 1 Dinámica ClásicaDocumento17 páginasProblemas Resueltos Tema 1 Dinámica ClásicaJorge Alonso BernardezAún no hay calificaciones
- Trabajo y EnergiaDocumento40 páginasTrabajo y EnergiaBryan SalvadorAún no hay calificaciones
- Física Materia B02Documento84 páginasFísica Materia B02JUANAún no hay calificaciones
- INF Balanza de JollyDocumento9 páginasINF Balanza de JollyTatuu RamírezAún no hay calificaciones
- Ley de Hooke y Diagrama de EsfuerzoDocumento4 páginasLey de Hooke y Diagrama de EsfuerzoEl Jerry 7u7Aún no hay calificaciones
- Ciencias Naturales Movimiento OndulatorioDocumento2 páginasCiencias Naturales Movimiento OndulatorioLEIDY JOHANA ZAMBRANO BECOCHEAún no hay calificaciones
- Informe 5 Fuerzas Elasticas Trabajo en El Plano InclinadoDocumento12 páginasInforme 5 Fuerzas Elasticas Trabajo en El Plano InclinadoCristian Pineida50% (2)
- PRACTICA I-2023 Física II y LaboratorioDocumento48 páginasPRACTICA I-2023 Física II y LaboratorioJoel MamaniAún no hay calificaciones
- 4 Basico Ciencias Fisicas y QuimicasDocumento37 páginas4 Basico Ciencias Fisicas y QuimicasMaryorie NiklitschekAún no hay calificaciones
- Laboratorio Nº1 Fisica II RAFAELODocumento19 páginasLaboratorio Nº1 Fisica II RAFAELOAntony More VillegasAún no hay calificaciones
- 2 - Problemas Dinámica 1314Documento8 páginas2 - Problemas Dinámica 1314Abel LopezAún no hay calificaciones
- Taller 1 - CulataDocumento8 páginasTaller 1 - CulataAilthon DionicioAún no hay calificaciones
- Labo 1Documento10 páginasLabo 1Fernando Guido Ordinola SanchezAún no hay calificaciones
- Sistema Cuerpo-resorte-Amortigüador. Movimiento Libre.Documento13 páginasSistema Cuerpo-resorte-Amortigüador. Movimiento Libre.Vladimir Quispe HuamanAún no hay calificaciones
- Curso Resistencia de Materiales: Unidad Didactica Nº01 Esfuerzo DeformacionDocumento30 páginasCurso Resistencia de Materiales: Unidad Didactica Nº01 Esfuerzo DeformacionhenriAún no hay calificaciones