También podría gustarte
- 06-12-2020 131042 PM PPT 05 TEORIA DE FLEXION DE VIGAS PDFDocumento33 páginas06-12-2020 131042 PM PPT 05 TEORIA DE FLEXION DE VIGAS PDFOsman Yangua CriolloAún no hay calificaciones
- Ejercicios sobre elasticidad y resistencia de materialesDe EverandEjercicios sobre elasticidad y resistencia de materialesAún no hay calificaciones
- 1-Tensor de DeformacionesDocumento36 páginas1-Tensor de DeformacionesJhan DAún no hay calificaciones
- Esfuerzo CortanteDocumento12 páginasEsfuerzo CortanteFabricio LeonAún no hay calificaciones
- Centro de MasaDocumento12 páginasCentro de MasaJsc ScAún no hay calificaciones
- Sesion IVDocumento39 páginasSesion IVPereañez JorgeAún no hay calificaciones
- Tensiones en La Roca: TridimensionalDocumento7 páginasTensiones en La Roca: TridimensionalRoberto GarcíaAún no hay calificaciones
- Fórmulas Mecánica Est C1Documento10 páginasFórmulas Mecánica Est C1Fabián Sánchez ParrinesAún no hay calificaciones
- Distrib de Velocidad Flujo Laminar Sist Rectang Ejercicio 1 Distrib de Velocidad Flujo Laminar Sist Rectang Ejercicio 1Documento10 páginasDistrib de Velocidad Flujo Laminar Sist Rectang Ejercicio 1 Distrib de Velocidad Flujo Laminar Sist Rectang Ejercicio 1JesusAlbertoMizgerAún no hay calificaciones
- Cap 05 - ElasticidadDocumento47 páginasCap 05 - ElasticidadAlan Abimael Machaca GonzalesAún no hay calificaciones
- Mecanica de Solidos Ing Esparza PDFDocumento94 páginasMecanica de Solidos Ing Esparza PDFDany Elviz AlvarezAún no hay calificaciones
- Guía+ +8.+Integrales+MúltiplesDocumento2 páginasGuía+ +8.+Integrales+MúltiplesDayrqAún no hay calificaciones
- 2esfuerzos en Una Masa de SueloDocumento45 páginas2esfuerzos en Una Masa de SueloChristian Sihuincho ClementeAún no hay calificaciones
- GEOTECNIA PP3 (2018-3) IDocumento83 páginasGEOTECNIA PP3 (2018-3) IPedro DuvanAún no hay calificaciones
- 12 Flexión DiagramasDocumento36 páginas12 Flexión Diagramasdaniel gonzalez martinezAún no hay calificaciones
- Mecanica de Rocas Min 3541 Parte 1Documento90 páginasMecanica de Rocas Min 3541 Parte 1Andrea Martinez CondeAún no hay calificaciones
- Teoria de Fallas Seccion Redonda 2Documento3 páginasTeoria de Fallas Seccion Redonda 2Tafoya Sánchez DanielAún no hay calificaciones
- Cap 2 Parte 1Documento77 páginasCap 2 Parte 1Carlos Pulache OrdoñezAún no hay calificaciones
- Tema7 TENSIONESNATURALESDocumento69 páginasTema7 TENSIONESNATURALESVinko Rodriguez DiazAún no hay calificaciones
- MIN240 - TorsiónDocumento12 páginasMIN240 - TorsiónNacho SanchezAún no hay calificaciones
- Calderon - Esfuerzos Insitu 180516Documento77 páginasCalderon - Esfuerzos Insitu 180516Laura Ruiz100% (1)
- Resumen Estabilidad IIDocumento18 páginasResumen Estabilidad IIAgus NabarlazAún no hay calificaciones
- Esfuerzo y Deformación - Torsión y FlexiónDocumento20 páginasEsfuerzo y Deformación - Torsión y FlexiónEnrike Toño PinoAún no hay calificaciones
- Presentaciónb2temaiv20 - 21 2Documento23 páginasPresentaciónb2temaiv20 - 21 2Antonio Guerrero DorantesAún no hay calificaciones
- Ejercicio de Barras en El EspacioDocumento7 páginasEjercicio de Barras en El EspacioaledarbonAún no hay calificaciones
- 3-Estado Deformacional2017Documento12 páginas3-Estado Deformacional2017Fabio Hereñu OzzyAún no hay calificaciones
- Confiabilidad de Sistemas Estructurales Bajo Acciones SísmicasDocumento16 páginasConfiabilidad de Sistemas Estructurales Bajo Acciones SísmicasHARRY25PAún no hay calificaciones
- PRE - Propiedades HormigonDocumento64 páginasPRE - Propiedades HormigonEzequiel CalabreseAún no hay calificaciones
- 5esfuerzos en Una Masa de SueloDocumento43 páginas5esfuerzos en Una Masa de Suelo01-IC-HU-CRISTIAM RICARDO POMALAZA RODRIGUEZ100% (1)
- MSG 03 Plas - CriteriosDocumento47 páginasMSG 03 Plas - CriteriosMateo DelgadoAún no hay calificaciones
- Análisis Diferencial 2018Documento37 páginasAnálisis Diferencial 2018Juan Carlos Polo GamarraAún no hay calificaciones
- RM 2 (Teoria Diciembre 2021)Documento47 páginasRM 2 (Teoria Diciembre 2021)Alejo VelozAún no hay calificaciones
- ResisDocumento6 páginasResisandres9andresitoAún no hay calificaciones
- Esfuerzo Cortante y DeformacionDocumento20 páginasEsfuerzo Cortante y DeformacionSusana FlorezAún no hay calificaciones
- Formato de Control de Tiempo en ObraDocumento3 páginasFormato de Control de Tiempo en ObracarlosmauriciopinoAún no hay calificaciones
- Formato de Control de Tiempo en ObraDocumento3 páginasFormato de Control de Tiempo en ObraCarlos MauricioAún no hay calificaciones
- Sesión 4Documento35 páginasSesión 4Andy García VillavicencioAún no hay calificaciones
- FundamentosDocumento61 páginasFundamentosJunioranderTG100% (1)
- Nociones Basicas de Torsion - ReedicionDocumento53 páginasNociones Basicas de Torsion - Reedicionivancattoni98Aún no hay calificaciones
- Beer 5e PPT para Clase c02 2Documento22 páginasBeer 5e PPT para Clase c02 2erickAún no hay calificaciones
- Metodo Matricial ResumenDocumento42 páginasMetodo Matricial ResumenIngCivil UpnAún no hay calificaciones
- HidrostaticaDocumento132 páginasHidrostaticagerwainstein2Aún no hay calificaciones
- Flexión Esfuerzo Normal y Tangencial PDFDocumento37 páginasFlexión Esfuerzo Normal y Tangencial PDFValeria Torres SanchezAún no hay calificaciones
- Analisis Estatico y Dinamico de Un EdificacionDocumento93 páginasAnalisis Estatico y Dinamico de Un EdificacionluzmanuelaAún no hay calificaciones
- 09-Flexion en Vigas - FinalDocumento91 páginas09-Flexion en Vigas - FinalJHONATAN ALEXANDER ROSALES PORTILLAAún no hay calificaciones
- Flujos No Viscosos y Viscosos S-1Documento30 páginasFlujos No Viscosos y Viscosos S-1Jhonatan Rojas GonzalesAún no hay calificaciones
- Matriz de RigidezDocumento15 páginasMatriz de RigidezAlejandroAún no hay calificaciones
- Diplomado Calculo y Diseño EstructuralDocumento11 páginasDiplomado Calculo y Diseño Estructuralangep1Aún no hay calificaciones
- Flexion en Vigas CON CORREGIDO FIESTASDocumento29 páginasFlexion en Vigas CON CORREGIDO FIESTASJuan Fiestas LoroAún no hay calificaciones
- Manual de Consulta - CIV 1229 - Hidráulica 1 - 2023Documento54 páginasManual de Consulta - CIV 1229 - Hidráulica 1 - 2023Æđřïåňă HïłåřïAún no hay calificaciones
- Flexion Vigas RectasDocumento18 páginasFlexion Vigas RectasxiviAún no hay calificaciones
- S03 - s2-MOVIMIENTO ARMÓNICO AMORTIGUADO Y FORZADODocumento17 páginasS03 - s2-MOVIMIENTO ARMÓNICO AMORTIGUADO Y FORZADOphaola.aguilarAún no hay calificaciones
- RdeM CAPITULO VI Solicitaciones Combinadas. Flexion Compuesta OblicuaDocumento34 páginasRdeM CAPITULO VI Solicitaciones Combinadas. Flexion Compuesta OblicuaLucia MacielAún no hay calificaciones
- IEG3110 Lecture06 vFUTUREDocumento24 páginasIEG3110 Lecture06 vFUTUREEduardo MillasAún no hay calificaciones
- Semana 3 - Esfuerzos Debidos A Cargas DistribuidasDocumento30 páginasSemana 3 - Esfuerzos Debidos A Cargas DistribuidasArnaldo Arthur Ortegal PacoriAún no hay calificaciones
- 07 Elementos en FlexionDocumento84 páginas07 Elementos en FlexionPatricia Caba NuñezAún no hay calificaciones
- Movimiento Rectilíneo Uniforme (MRU)Documento20 páginasMovimiento Rectilíneo Uniforme (MRU)Eddy Leon100% (1)
- UNIDAD II. Tensión y Deformación Plana - Semana 3 - Grupo I y II - Resistencia de Materiales - UNHEVAL PDFDocumento35 páginasUNIDAD II. Tensión y Deformación Plana - Semana 3 - Grupo I y II - Resistencia de Materiales - UNHEVAL PDFEric ManuelAún no hay calificaciones
- UNIDAD II - Tensión y Deformación Plana - Sesión 5 - Resistencia de Materiales - Grupo 1 - UNHEVALDocumento24 páginasUNIDAD II - Tensión y Deformación Plana - Sesión 5 - Resistencia de Materiales - Grupo 1 - UNHEVALEric ManuelAún no hay calificaciones
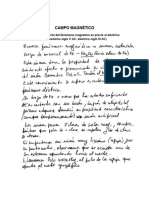
- Campo MagnéticoDocumento12 páginasCampo MagnéticoIgnacio FeijóoAún no hay calificaciones
- 23Documento12 páginas23Ignacio FeijóoAún no hay calificaciones
- TABLAS Y ECUACIONES PARA 3º PARCIAL - 2020 - Actualizado 2020.11.07Documento6 páginasTABLAS Y ECUACIONES PARA 3º PARCIAL - 2020 - Actualizado 2020.11.07Ignacio FeijóoAún no hay calificaciones
- 17Documento5 páginas17Ignacio FeijóoAún no hay calificaciones
- TDH 2023-Reglamento General de TPDocumento2 páginasTDH 2023-Reglamento General de TPIgnacio FeijóoAún no hay calificaciones
- Latente EscondidoDocumento15 páginasLatente EscondidoIgnacio FeijóoAún no hay calificaciones
- Fenómenos Eléctricos: La Carga Eléctrica (Al Igual Que La Masa) Pertenece A Lo Que Llamamos EstructuraDocumento14 páginasFenómenos Eléctricos: La Carga Eléctrica (Al Igual Que La Masa) Pertenece A Lo Que Llamamos EstructuraIgnacio FeijóoAún no hay calificaciones
- 3Documento17 páginas3Ignacio FeijóoAún no hay calificaciones
- 7Documento15 páginas7Ignacio FeijóoAún no hay calificaciones
- Ar - Ea: TitularDocumento2 páginasAr - Ea: TitularIgnacio FeijóoAún no hay calificaciones
- Tabla de Vapor Saturado de AguaDocumento2 páginasTabla de Vapor Saturado de AguaIgnacio FeijóoAún no hay calificaciones
- Cálculo de Las Cargas de Aire Acondicionado de Verano: Inst TermomecDocumento36 páginasCálculo de Las Cargas de Aire Acondicionado de Verano: Inst TermomecIgnacio FeijóoAún no hay calificaciones
- Tablas y Ecuaciones para 1º Parcial - Edicion 2020Documento2 páginasTablas y Ecuaciones para 1º Parcial - Edicion 2020Ignacio FeijóoAún no hay calificaciones
- Transmisión Del Calor: Inst. TermomecDocumento21 páginasTransmisión Del Calor: Inst. TermomecIgnacio FeijóoAún no hay calificaciones
- Tablas y Ecuaciones para 2º Parcial - 2021Documento3 páginasTablas y Ecuaciones para 2º Parcial - 2021Ignacio FeijóoAún no hay calificaciones
- 04 Confort T+®rmicoDocumento15 páginas04 Confort T+®rmicoIgnacio FeijóoAún no hay calificaciones
- UTN-FRBA-ICCA-resueltos - 01 - 1.0.0Documento10 páginasUTN-FRBA-ICCA-resueltos - 01 - 1.0.0Ignacio FeijóoAún no hay calificaciones
- UTN-FRBA-ICCA-problemas - 01 - 1.0.0Documento1 páginaUTN-FRBA-ICCA-problemas - 01 - 1.0.0Ignacio FeijóoAún no hay calificaciones
- CIVIL CA ATP 001 v.1.0Documento20 páginasCIVIL CA ATP 001 v.1.0Ignacio FeijóoAún no hay calificaciones
- 01-Intro Tension DeformacionDocumento10 páginas01-Intro Tension DeformacionIgnacio FeijóoAún no hay calificaciones
- Procedimiento de Verficacion Con El AbacoDocumento2 páginasProcedimiento de Verficacion Con El AbacoIgnacio FeijóoAún no hay calificaciones
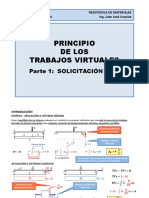
- 04 Principio Trabajos Virtuales AxilDocumento9 páginas04 Principio Trabajos Virtuales AxilIgnacio FeijóoAún no hay calificaciones
- Ejemplo AXIL - Clase 19.04.2021Documento5 páginasEjemplo AXIL - Clase 19.04.2021Ignacio FeijóoAún no hay calificaciones
- 04-Axil-Parte 1Documento15 páginas04-Axil-Parte 1Ignacio FeijóoAún no hay calificaciones
- SOLICITACIÓN AXIL - Ejercicios Adicionales (Optativos)Documento7 páginasSOLICITACIÓN AXIL - Ejercicios Adicionales (Optativos)Ignacio FeijóoAún no hay calificaciones
- 04-Axil-Parte 2Documento18 páginas04-Axil-Parte 2Ignacio FeijóoAún no hay calificaciones
- Reparto 1 4Documento4 páginasReparto 1 4Ignacio FeijóoAún no hay calificaciones
- 10 O2053 Coro Miguel TP3Documento16 páginas10 O2053 Coro Miguel TP3Ignacio FeijóoAún no hay calificaciones
- ContratosDocumento45 páginasContratosIgnacio FeijóoAún no hay calificaciones
- TP4 - Cimentaciones 2021 v2Documento16 páginasTP4 - Cimentaciones 2021 v2Ignacio FeijóoAún no hay calificaciones
- EtaticaDocumento4 páginasEtaticaMilitza RamosAún no hay calificaciones
- 7º Bas Pauta Guia 3 Act Efecto GravedadDocumento2 páginas7º Bas Pauta Guia 3 Act Efecto GravedadManne León Ladrón de GuevaraAún no hay calificaciones
- Trabajo de Dinamica Potencia y Eficiencia Trabajo y EnergiaDocumento13 páginasTrabajo de Dinamica Potencia y Eficiencia Trabajo y EnergiaJazAún no hay calificaciones
- Semana 11Documento25 páginasSemana 11YESSENIA ANACELI FERNANDEZ REYESAún no hay calificaciones
- CINEMATICADocumento13 páginasCINEMATICAPedro SCCAún no hay calificaciones
- 2DAPRACTICADocumento2 páginas2DAPRACTICAMercedes Rosa Campó RojasAún no hay calificaciones
- Ecuación Modificada de ColebrookDocumento9 páginasEcuación Modificada de Colebrookjose vidangos100% (1)
- Resolucion de Ejercicios de Torsion 70773 Downloable 1497474Documento11 páginasResolucion de Ejercicios de Torsion 70773 Downloable 1497474JamesAún no hay calificaciones
- Bridas de Motores Muy Bueno VER PDFDocumento66 páginasBridas de Motores Muy Bueno VER PDFDaniel FredianiAún no hay calificaciones
- PROBLEMAS U2 para Resolver GraficamenteDocumento5 páginasPROBLEMAS U2 para Resolver GraficamenteJûân LôpëzAún no hay calificaciones
- Inducción ElectromagnéticaDocumento44 páginasInducción Electromagnéticajavier100% (1)
- Cinética de Una Partícula: Impulso y Cantidad de MovimientoDocumento16 páginasCinética de Una Partícula: Impulso y Cantidad de MovimientoBrayam Qsp QuichuaAún no hay calificaciones
- Fisica Cinematica CurvilineaDocumento5 páginasFisica Cinematica CurvilineaAriff VenturaAún no hay calificaciones
- Formulario de GasesDocumento2 páginasFormulario de GasesF Javier García DíazAún no hay calificaciones
- Laboratorio 3 FisicaDocumento23 páginasLaboratorio 3 FisicaBrenda Lizet Layza LabanAún no hay calificaciones
- Hcanales Cap2Documento51 páginasHcanales Cap2Azu MeApAún no hay calificaciones
- Movimiento CircularDocumento1 páginaMovimiento CircularKarol Verenice Amaya MartinezAún no hay calificaciones
- 5FIP6F09 - Trabajo y PotenciaDocumento6 páginas5FIP6F09 - Trabajo y PotenciaAly BoydyAún no hay calificaciones
- Ejercicio 1 Jhon Fredy BohorquezDocumento3 páginasEjercicio 1 Jhon Fredy BohorquezKaren Stefania Hortua CruzAún no hay calificaciones
- Medidores de Flujo Moreno Juan CI 27681003 O913 Auto Industrial PDFDocumento32 páginasMedidores de Flujo Moreno Juan CI 27681003 O913 Auto Industrial PDFJuanAún no hay calificaciones
- Joel Iber Mamani CallisayaDocumento11 páginasJoel Iber Mamani CallisayaJae KairoAún no hay calificaciones
- Laboratorio Caida LibreDocumento19 páginasLaboratorio Caida LibreLaura Gomez ZuluagaAún no hay calificaciones
- Amplificacion Sismica de Sitio1Documento116 páginasAmplificacion Sismica de Sitio1Miguel Rivera ZetaAún no hay calificaciones
- Ejercicios EstaticaDocumento10 páginasEjercicios EstaticaJuan orjuelaAún no hay calificaciones
- Trabajograduacion Cartas Escaneadas - 201314169Documento500 páginasTrabajograduacion Cartas Escaneadas - 201314169CARLOS RODRIGO HERNANDEZ PEREZAún no hay calificaciones
- Sintesis Grado 6°Documento7 páginasSintesis Grado 6°Quimica SebastianaAún no hay calificaciones
- Semana 3Documento11 páginasSemana 3mijhaelivanrojasAún no hay calificaciones
- MCA 5X5 MAYOR A 0.60 M. HR 2.3Documento8 páginasMCA 5X5 MAYOR A 0.60 M. HR 2.3HECTOR CARLINAún no hay calificaciones
- Actividad Previa Oscilaciones AmortiguadasDocumento4 páginasActividad Previa Oscilaciones Amortiguadassara peresAún no hay calificaciones
- Flexion ExposicionDocumento21 páginasFlexion ExposicionAlexander Quispe HuarcaAún no hay calificaciones
- Electricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiDe EverandElectricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiCalificación: 3.5 de 5 estrellas3.5/5 (5)
- Entrelazamiento cuántico y sincronicidad. Campos de fuerza, no localidad, percepciones extrasensoriales. Las sorprendentes propiedades de la física cuántica.De EverandEntrelazamiento cuántico y sincronicidad. Campos de fuerza, no localidad, percepciones extrasensoriales. Las sorprendentes propiedades de la física cuántica.Calificación: 4.5 de 5 estrellas4.5/5 (9)
- Química orgánica: ejercicios de aplicaciónDe EverandQuímica orgánica: ejercicios de aplicaciónCalificación: 5 de 5 estrellas5/5 (3)
- Flujo de fluidos e intercambio de calorDe EverandFlujo de fluidos e intercambio de calorCalificación: 1 de 5 estrellas1/5 (1)
- La sanacion anticipada. El uso de la energía a través de la intenciónDe EverandLa sanacion anticipada. El uso de la energía a través de la intenciónCalificación: 4 de 5 estrellas4/5 (13)
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalDe EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalCalificación: 5 de 5 estrellas5/5 (3)
- La partícula de Dios. El origen del universo, hoy. La verdad última entre la ciencia y la religiónDe EverandLa partícula de Dios. El origen del universo, hoy. La verdad última entre la ciencia y la religiónCalificación: 4.5 de 5 estrellas4.5/5 (10)
- La Física - Aventura del pensamientoDe EverandLa Física - Aventura del pensamientoCalificación: 4.5 de 5 estrellas4.5/5 (9)
- El principio de posibilidad: Cómo la física cuántica puede mejorar tu forma de pensar, vivir y amarDe EverandEl principio de posibilidad: Cómo la física cuántica puede mejorar tu forma de pensar, vivir y amarCalificación: 4 de 5 estrellas4/5 (6)
- Física mecánica: Nivelación para estudiantes universitariosDe EverandFísica mecánica: Nivelación para estudiantes universitariosCalificación: 4 de 5 estrellas4/5 (7)
- Física cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasDe EverandFísica cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasCalificación: 5 de 5 estrellas5/5 (4)
- Aprendizaje Automático: El Aprendizaje Automático para principiantes que desean comprender aplicaciones, Inteligencia Artificial, Minería de Datos, Big Data y másDe EverandAprendizaje Automático: El Aprendizaje Automático para principiantes que desean comprender aplicaciones, Inteligencia Artificial, Minería de Datos, Big Data y másCalificación: 3.5 de 5 estrellas3.5/5 (6)
- Proyectos de instalaciones eléctrica de baja tensiónDe EverandProyectos de instalaciones eléctrica de baja tensiónCalificación: 5 de 5 estrellas5/5 (1)
- Análisis estructural básico: Apuntes de claseDe EverandAnálisis estructural básico: Apuntes de claseCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Razonamiento Lógico Matemático para la toma de decisionesDe EverandRazonamiento Lógico Matemático para la toma de decisionesCalificación: 4.5 de 5 estrellas4.5/5 (8)
- Chernóbil: La catástrofe nuclear que impactó al mundo enteroDe EverandChernóbil: La catástrofe nuclear que impactó al mundo enteroCalificación: 3.5 de 5 estrellas3.5/5 (3)
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoDe EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Guía práctica para la refracción ocularDe EverandGuía práctica para la refracción ocularCalificación: 5 de 5 estrellas5/5 (2)
- Los gatos sueñan con física cuántica y los perros con universos paralelos: Mecánica cuántica para todas las edadesDe EverandLos gatos sueñan con física cuántica y los perros con universos paralelos: Mecánica cuántica para todas las edadesCalificación: 4.5 de 5 estrellas4.5/5 (18)
- La física de Dios: La conexión entre la física cuántica, la conciencia, la Teoría M, el cielo, la neurociencia y la transcedenciaDe EverandLa física de Dios: La conexión entre la física cuántica, la conciencia, la Teoría M, el cielo, la neurociencia y la transcedenciaCalificación: 4.5 de 5 estrellas4.5/5 (18)