También podría gustarte
- Métodos Matriciales para ingenieros con MATLABDe EverandMétodos Matriciales para ingenieros con MATLABCalificación: 5 de 5 estrellas5/5 (1)
- Reporte Practica 2. Movimiento Rectilineo UniformeDocumento3 páginasReporte Practica 2. Movimiento Rectilineo UniformeSteven Valverde MoraAún no hay calificaciones
- Laboratorio Informe Interpretacion Graficas1.1Documento12 páginasLaboratorio Informe Interpretacion Graficas1.1Brayan BolivarAún no hay calificaciones
- Tratamiento de Datos 3 FinDocumento6 páginasTratamiento de Datos 3 FinAriana GrandeAún no hay calificaciones
- Ecuaciones EmpiricasDocumento12 páginasEcuaciones EmpiricasJose CubasAún no hay calificaciones
- Labo Exp 03Documento9 páginasLabo Exp 03RAMOS GARCIA JENIFER YESENIAAún no hay calificaciones
- Informe 2Documento12 páginasInforme 2Sergio David Arguata MaytaAún no hay calificaciones
- Informe LAB-FISDocumento9 páginasInforme LAB-FISMarco MendozaAún no hay calificaciones
- Labo Exp03Documento9 páginasLabo Exp03Jenifer RamosAún no hay calificaciones
- IG42 - MA466 - L10 - Rivera, Principe, Ramos, PonceDocumento3 páginasIG42 - MA466 - L10 - Rivera, Principe, Ramos, PoncePamela Rivera contrerasAún no hay calificaciones
- Informe 03 MRUDocumento3 páginasInforme 03 MRUDIEGO ARMANDO GUTIERREZ MARCANOAún no hay calificaciones
- Reporte de OscilacionesDocumento11 páginasReporte de OscilacionesJafet ContrerasAún no hay calificaciones
- Guía Laboratorio MRUV WordDocumento14 páginasGuía Laboratorio MRUV WordMATEO FOREROAún no hay calificaciones
- F MruDocumento16 páginasF MruApala Suñiga Nelson JorgeAún no hay calificaciones
- GALVANOMETRO TANGENTEDocumento9 páginasGALVANOMETRO TANGENTELeonardo Cruz ArcaniAún no hay calificaciones
- Ticona Bautista Caroline Reportes Segunda FaseDocumento19 páginasTicona Bautista Caroline Reportes Segunda Fasemichael jeususAún no hay calificaciones
- TP 1Documento7 páginasTP 1Paolo CettiAún no hay calificaciones
- Guía de laboratorio de Física I sobre caída libreDocumento8 páginasGuía de laboratorio de Física I sobre caída libreKarolinaSchmiedlAún no hay calificaciones
- Disco de MaxwellDocumento4 páginasDisco de MaxwellNayua Del ValleAún no hay calificaciones
- Laboratorio 7 GRUPO 13Documento7 páginasLaboratorio 7 GRUPO 13yanira palominoAún no hay calificaciones
- Colisiones Fis100 UmsaDocumento18 páginasColisiones Fis100 UmsaAndres NinaAún no hay calificaciones
- Desarrollo Del Reporte: Masa de La Porta Masas: Diámetro Del Eje de GiroDocumento3 páginasDesarrollo Del Reporte: Masa de La Porta Masas: Diámetro Del Eje de GiroDaniela Machuca VásquezAún no hay calificaciones
- Informe 2Documento10 páginasInforme 2Omar CanoAún no hay calificaciones
- Desarrollo Del Reporte: Masa de La Porta Masas: Diámetro Del Eje de GiroDocumento3 páginasDesarrollo Del Reporte: Masa de La Porta Masas: Diámetro Del Eje de GirobankumaAún no hay calificaciones
- Laboratorio 3 HoyDocumento13 páginasLaboratorio 3 HoyAndres Miguel Cruz CalleAún no hay calificaciones
- Coeficiente Experimental Del Amortiguamiento Del AireDocumento4 páginasCoeficiente Experimental Del Amortiguamiento Del AireAlexis TabaresAún no hay calificaciones
- PRACTICA 2º Cinemática LinealDocumento7 páginasPRACTICA 2º Cinemática LinealVIVIANA ZULEMA AZA�ERO MAGANAún no hay calificaciones
- 5 Calculos y GraficasDocumento5 páginas5 Calculos y GraficasrafaelAún no hay calificaciones
- Informe de Caída LibreDocumento3 páginasInforme de Caída LibreJASSIR DAVID OLIVARES JIMENEZAún no hay calificaciones
- informe mruDocumento6 páginasinforme mrumariajustacuetoAún no hay calificaciones
- INFORME 2 (Terminado)Documento8 páginasINFORME 2 (Terminado)Ariana GrandeAún no hay calificaciones
- Laboratorio 4Documento6 páginasLaboratorio 4Karol LealAún no hay calificaciones
- Práctica 4: Plano Inclinado (Sin Fricción) : Equipo 4Documento13 páginasPráctica 4: Plano Inclinado (Sin Fricción) : Equipo 4ClauAún no hay calificaciones
- Laboratorio Informe Interpretacion Graficas1.1Documento12 páginasLaboratorio Informe Interpretacion Graficas1.1Brayan BolivarAún no hay calificaciones
- LABORATORIO Interpretacion de GraficasDocumento11 páginasLABORATORIO Interpretacion de GraficasAnonymous JIoaxmAún no hay calificaciones
- Informe Colisiones 1d CDDocumento10 páginasInforme Colisiones 1d CDƉ-Mân ĽôpêʑAún no hay calificaciones
- Informe Colisiones 1d CDDocumento10 páginasInforme Colisiones 1d CDƉ-Mân ĽôpêʑAún no hay calificaciones
- Informe Mru PDFDocumento6 páginasInforme Mru PDFMaría Laura CuetoAún no hay calificaciones
- Informe 5Documento12 páginasInforme 5Darwin Harold Avila MartínezAún no hay calificaciones
- Lab Compuerta MAS Vs MCUDocumento10 páginasLab Compuerta MAS Vs MCUJuan David Garcia GalloAún no hay calificaciones
- Movimiento de ProyectilesDocumento248 páginasMovimiento de ProyectilesPULIDO ESPEJO CAMILO ANDRESAún no hay calificaciones
- Trayectoria parabólica de caída libreDocumento8 páginasTrayectoria parabólica de caída libreJANETH PATRICIA HERNANDEZ BASTIDASAún no hay calificaciones
- Pendulo simple periodoDocumento13 páginasPendulo simple periodoYonil Rojas RivadeneiroAún no hay calificaciones
- Practica 6. FisicaDocumento11 páginasPractica 6. FisicaLeslie SafaeraAún no hay calificaciones
- UNIVERSIDAD TECNICA DE ORURO (1)Documento6 páginasUNIVERSIDAD TECNICA DE ORURO (1)Nikol Antonio HuarayoAún no hay calificaciones
- Ensayo Pendulo SimpleDocumento6 páginasEnsayo Pendulo SimpleRichard Santiago Yate PachónAún no hay calificaciones
- Práctica VDocumento6 páginasPráctica VJesusAún no hay calificaciones
- Informe 1 de Física - UniDocumento21 páginasInforme 1 de Física - UniGuillermo Villarroel HanccoAún no hay calificaciones
- Fis 200 Inf#5Documento4 páginasFis 200 Inf#5Jhon D Cahuaya PintoAún no hay calificaciones
- MCUA: Movimiento circular uniformemente aceleradoDocumento5 páginasMCUA: Movimiento circular uniformemente aceleradoAnthony KS0% (1)
- Informe Práctica 2Documento4 páginasInforme Práctica 2marta03smAún no hay calificaciones
- Péndulo simple: Análisis experimental de la oscilaciónDocumento9 páginasPéndulo simple: Análisis experimental de la oscilaciónRicardo100% (1)
- Física general - Caída libreDocumento8 páginasFísica general - Caída libreJuan LopezAún no hay calificaciones
- Ecuaciones Empiricas - Laboratorio - S4 - 1Documento8 páginasEcuaciones Empiricas - Laboratorio - S4 - 1ROYER LEONARDO HERRERA BECERRAAún no hay calificaciones
- Laboratoio 2 Caida LibreDocumento8 páginasLaboratoio 2 Caida LibreJuan Pablo NAún no hay calificaciones
- Informe N ° 2 Ecuaciones Empiricas (M.R)Documento7 páginasInforme N ° 2 Ecuaciones Empiricas (M.R)MELINA RIVERA JIMENEZAún no hay calificaciones
- Gu A QtiPlotDocumento13 páginasGu A QtiPlotluciaAún no hay calificaciones
- Fase 5 Diferenciación e Integración NuméricaDocumento23 páginasFase 5 Diferenciación e Integración NuméricaoscartvgarciaAún no hay calificaciones
- Laboratorio 11. Fisica MecanicaDocumento15 páginasLaboratorio 11. Fisica MecanicaAndrés GómezAún no hay calificaciones
- Informe 6 Movimiento Uniformemente AceleradoDocumento9 páginasInforme 6 Movimiento Uniformemente AceleradoAndriu FlowersAún no hay calificaciones
- Encuesta PDFDocumento1 páginaEncuesta PDFJae KairoAún no hay calificaciones
- Lab 4reinaDocumento12 páginasLab 4reinaJae KairoAún no hay calificaciones
- 2022 Año de La Revolución Cultural para La Despatriarcalización: Por Una Vida Libre de Violencia Contra Las MujeresDocumento304 páginas2022 Año de La Revolución Cultural para La Despatriarcalización: Por Una Vida Libre de Violencia Contra Las MujeresGabriel Quispe100% (1)
- Deport eDocumento4 páginasDeport eJae KairoAún no hay calificaciones
- Historia 2Documento4 páginasHistoria 2Jae KairoAún no hay calificaciones
- En Cuesta PDFDocumento1 páginaEn Cuesta PDFJae KairoAún no hay calificaciones
- Bowser DocumentDocumento1 páginaBowser DocumentJae KairoAún no hay calificaciones
- AnimalDocumento2 páginasAnimalJae KairoAún no hay calificaciones
- AnimalesDocumento2 páginasAnimalesJae KairoAún no hay calificaciones
- Historia 4Documento6 páginasHistoria 4Jae KairoAún no hay calificaciones
- Cien CIADocumento2 páginasCien CIAJae KairoAún no hay calificaciones
- HistoriaDocumento6 páginasHistoriaJae KairoAún no hay calificaciones
- Historia 3Documento2 páginasHistoria 3Jae KairoAún no hay calificaciones
- Ambient eDocumento7 páginasAmbient eJae KairoAún no hay calificaciones
- ResumenDocumento5 páginasResumenjuan carlos apaza gutierrezAún no hay calificaciones
- Traducion VacummateDocumento7 páginasTraducion VacummateModesto Olmedo RamirezAún no hay calificaciones
- Examen Prototipo de Media y Valor Esperado y Funcion de VADocumento2 páginasExamen Prototipo de Media y Valor Esperado y Funcion de VAEliu AcostaAún no hay calificaciones
- Tarea2 2020Documento4 páginasTarea2 2020SergioAún no hay calificaciones
- Tornillos y soldaduras en diseño estructuralDocumento109 páginasTornillos y soldaduras en diseño estructuralToni TaverasAún no hay calificaciones
- Ejercicio de Aplicacion JuanDocumento3 páginasEjercicio de Aplicacion JuanJUAN FERNANDO ARESTEGUI HUILLCAAún no hay calificaciones
- Física 4Documento4 páginasFísica 4Franck Elías Huisa TutacanoAún no hay calificaciones
- Clasificacion de Los Nucleidos para Cuarto de SecundariaDocumento6 páginasClasificacion de Los Nucleidos para Cuarto de SecundariakaterinAún no hay calificaciones
- Taller 4Documento11 páginasTaller 4John Jairo MarinAún no hay calificaciones
- Sistemas Constructivo1Documento19 páginasSistemas Constructivo1Damian Diaz MoralesAún no hay calificaciones
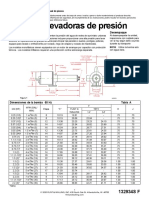
- 132934S FW0154 Booster Pump - 201027 - 114847Documento15 páginas132934S FW0154 Booster Pump - 201027 - 114847Franco YnquillaAún no hay calificaciones
- Microscopia Optica y Tem 1Documento7 páginasMicroscopia Optica y Tem 1J.B. SierraAún no hay calificaciones
- Cuadro Comparativo Transferencia de CalorDocumento1 páginaCuadro Comparativo Transferencia de CalorRuben Jose BettiolAún no hay calificaciones
- CorrientesDocumento25 páginasCorrientesKaren CáceresAún no hay calificaciones
- Movimiento vectorial, velocidad y aceleraciónDocumento11 páginasMovimiento vectorial, velocidad y aceleraciónAnita ParedesAún no hay calificaciones
- Resistencia de MaterialesDocumento8 páginasResistencia de MaterialesMariano SirpaAún no hay calificaciones
- Capitulo IV. Metodo Sismico PDFDocumento74 páginasCapitulo IV. Metodo Sismico PDFMoises HernandezAún no hay calificaciones
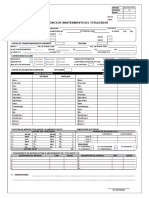
- Pgcp-003-f001 - Ficha Técnica de Mantenimiento Del TotalizadorDocumento4 páginasPgcp-003-f001 - Ficha Técnica de Mantenimiento Del TotalizadorEnrique Tejada FarfanAún no hay calificaciones
- ESPECIFICACIÓNES TÉCNICAS DEL PROYECTO-MIGRANTES NNyADocumento18 páginasESPECIFICACIÓNES TÉCNICAS DEL PROYECTO-MIGRANTES NNyAjulio cesar san pedroAún no hay calificaciones
- PDF Filtros VFDocumento4 páginasPDF Filtros VFArv NavarroAún no hay calificaciones
- Transformada ZDocumento17 páginasTransformada ZByron ViscainoAún no hay calificaciones
- PE 23 - Acondicionamiento de Los Tableros Eléctricos para INDECIDocumento9 páginasPE 23 - Acondicionamiento de Los Tableros Eléctricos para INDECIClaudio Contreras BailaAún no hay calificaciones
- Física Movimiento en El PlanoDocumento3 páginasFísica Movimiento en El PlanoCarlos Alejandro Telleria GutierrezAún no hay calificaciones
- Elt 231 Circuitos IIDocumento2 páginasElt 231 Circuitos IIHenry MurilloAún no hay calificaciones
- Laboratorio 2 de Elasticidad y Resistencia de Materiales XLXXDocumento6 páginasLaboratorio 2 de Elasticidad y Resistencia de Materiales XLXXLuis Alex TqAún no hay calificaciones
- TrbjodeInvg Tema07 Ópticas Neyra - VelasquezDocumento10 páginasTrbjodeInvg Tema07 Ópticas Neyra - VelasquezCésar Alonzo VelásquezAún no hay calificaciones
- CatalogoDocumento47 páginasCatalogopablo ignacio cancino molinaAún no hay calificaciones
- Pruebas Diagnosticas 2023 - Fisica - GPNSFDocumento36 páginasPruebas Diagnosticas 2023 - Fisica - GPNSFfreddy mendezAún no hay calificaciones
- Ficha de Trabajo - La ParábolaDocumento5 páginasFicha de Trabajo - La Parábolavalentina RAún no hay calificaciones
- Programa - Cálculo Diferencial 2020 - 2SDocumento2 páginasPrograma - Cálculo Diferencial 2020 - 2STom RiddleAún no hay calificaciones