También podría gustarte
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209De EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Calificación: 5 de 5 estrellas5/5 (2)
- Curso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorDe EverandCurso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorAún no hay calificaciones
- Taller 2Documento7 páginasTaller 2andres100% (1)
- Cambio Ravigneaux: esquema generalizadoDocumento10 páginasCambio Ravigneaux: esquema generalizadoantony rafael sarmientoAún no hay calificaciones
- Examen Final de NeumaticaDocumento10 páginasExamen Final de NeumaticaJohan UsecheAún no hay calificaciones
- Automatización lavado cocheDocumento6 páginasAutomatización lavado cocheSergioXqueAún no hay calificaciones
- Practica 1Documento10 páginasPractica 1Uriel MartinezAún no hay calificaciones
- 10 Ejemplos de Aplicaciones Industriales de Circuitos ElectroneumaticosDocumento46 páginas10 Ejemplos de Aplicaciones Industriales de Circuitos ElectroneumaticosAndrez Hernandez50% (20)
- Inversion de Giro de Un Motor TrifasicoDocumento3 páginasInversion de Giro de Un Motor TrifasicoJoseRojasAún no hay calificaciones
- PHP Programación Orientada A ObjetosDocumento200 páginasPHP Programación Orientada A ObjetosJesús Cárdenas100% (1)
- UTN Haedo Sistemas AutomatizaciónDocumento15 páginasUTN Haedo Sistemas AutomatizaciónLizardo Meneses Rojas100% (1)
- Practica No.6Documento10 páginasPractica No.6Alexis MuñozAún no hay calificaciones
- Laboratorio 54. El Motor Sincrónico IIDocumento10 páginasLaboratorio 54. El Motor Sincrónico IIDarkMagicXixicoAún no hay calificaciones
- Electroneumatica AvanzadaDocumento4 páginasElectroneumatica AvanzadaBrayan VivasAún no hay calificaciones
- Ejercicios AutomatismosDocumento7 páginasEjercicios Automatismossamuel baltazar fructuosoAún no hay calificaciones
- Control de dos cintas transportadorasDocumento7 páginasControl de dos cintas transportadorassamuel baltazar fructuosoAún no hay calificaciones
- Control cinta transportadora tolvasDocumento2 páginasControl cinta transportadora tolvasAndres VillagomezAún no hay calificaciones
- Circuito Inversor de Giro de Un Motor CADocumento16 páginasCircuito Inversor de Giro de Un Motor CAVane Andres HAAún no hay calificaciones
- Grupo 4 - Fines de CarreraDocumento27 páginasGrupo 4 - Fines de CarreraROJAS CHOQUE LUIS CARLOSAún no hay calificaciones
- Evaluacion Neumatica UautonomaDocumento3 páginasEvaluacion Neumatica UautonomaJohn Gustinez0% (1)
- Unidad 6-1Documento12 páginasUnidad 6-1Ediquio Gonzalez0% (1)
- Descripción de La Estación 2Documento12 páginasDescripción de La Estación 2Anonymous oEMUYsCAún no hay calificaciones
- Práctica 12 CSDocumento5 páginasPráctica 12 CSCristian Emanuel Roman LopezAún no hay calificaciones
- Ejercicios ElectroneumaticaDocumento7 páginasEjercicios ElectroneumaticaJesus AntonioAún no hay calificaciones
- Practicas Unidad 1 PLCDocumento7 páginasPracticas Unidad 1 PLCAngel NgAún no hay calificaciones
- Practica 2Documento8 páginasPractica 2Daniel Omar CorreaAún no hay calificaciones
- Proyecto Final de Instrumentacion 2Documento12 páginasProyecto Final de Instrumentacion 2Dario Javier Tubon TiteAún no hay calificaciones
- Previo 2Documento5 páginasPrevio 2ingenierobyemAún no hay calificaciones
- Ejercicios ElectroneumáticaDocumento7 páginasEjercicios Electroneumáticaantomy300% (1)
- Ejercicios Sistemas de Arranque Motores EléctricosDocumento2 páginasEjercicios Sistemas de Arranque Motores EléctricosNickAún no hay calificaciones
- Informe N-12 - Electrotecnia IndustrialDocumento12 páginasInforme N-12 - Electrotecnia IndustrialStefanyCornejoVildosoAún no hay calificaciones
- CMR Motores SincronosDocumento6 páginasCMR Motores SincronosPablo ZumbaAún no hay calificaciones
- Control de motores y cilindros neumáticosDocumento22 páginasControl de motores y cilindros neumáticosMario RuizAún no hay calificaciones
- Circuito ElectroneumaticoDocumento7 páginasCircuito ElectroneumaticoRonaldo Chiche SurcoAún no hay calificaciones
- Control de Giro Motor TrifasicoDocumento7 páginasControl de Giro Motor TrifasicoFanny LopezAún no hay calificaciones
- Practica n0 8Documento8 páginasPractica n0 8Daniel Omar CorreaAún no hay calificaciones
- C4 MotorSincronicoDocumento46 páginasC4 MotorSincronicoAdrianaMorenoAún no hay calificaciones
- Unidad 5.1Documento10 páginasUnidad 5.1Ediquio GonzalezAún no hay calificaciones
- Informe Compuertas LogicasDocumento9 páginasInforme Compuertas LogicasarnoldtoniAún no hay calificaciones
- ALUMNO GUia Motor SincronoDocumento8 páginasALUMNO GUia Motor SincronoChristopher Andres Perez BeltranAún no hay calificaciones
- Lab Maquinas 2 - Informe - 5 - Frenado Del Motor AsincronoDocumento11 páginasLab Maquinas 2 - Informe - 5 - Frenado Del Motor Asincronoaravemo83Aún no hay calificaciones
- Casos Electro-Neumáticos-Ticlla Benavides José PDFDocumento25 páginasCasos Electro-Neumáticos-Ticlla Benavides José PDFJosé Carlos Ticlla BenavidesAún no hay calificaciones
- Problemas de electro-neumáticaDocumento3 páginasProblemas de electro-neumáticaSergio Rodriguez ToroAún no hay calificaciones
- Laboratorio N º 4Documento4 páginasLaboratorio N º 4Saul ForondaAún no hay calificaciones
- Lab 3 MOTOR CORRIENTE DIRECTADocumento15 páginasLab 3 MOTOR CORRIENTE DIRECTAyuryAún no hay calificaciones
- Motor SincronoDocumento7 páginasMotor SincronoZambita SantosAún no hay calificaciones
- Examen Final Taller I-2020Documento1 páginaExamen Final Taller I-2020OSCAR CRISTIAN CONDORI MOLLOAún no hay calificaciones
- Guia 5 Maquinas ElectricasDocumento13 páginasGuia 5 Maquinas ElectricasPablo Pablo Pablinho PablosoAún no hay calificaciones
- GRAFCETTareaDocumento7 páginasGRAFCETTareaAlejoCarreraAún no hay calificaciones
- Reporte 4Documento15 páginasReporte 4Cristian AlejandroAún no hay calificaciones
- Maquinas Practica 3Documento7 páginasMaquinas Practica 3Enrique LeonAún no hay calificaciones
- Motor Sincrono2 1Documento28 páginasMotor Sincrono2 1marcoleon2014100% (1)
- Informe 09Documento9 páginasInforme 09bassAún no hay calificaciones
- IllusionMOT SAT3Documento27 páginasIllusionMOT SAT3nlucho77Aún no hay calificaciones
- Informe N 05 Máquina SíncronaDocumento20 páginasInforme N 05 Máquina SíncronaNeyserBurgaMarin100% (1)
- Practica 4 Con Simulador EMSDocumento10 páginasPractica 4 Con Simulador EMSjhonatanAún no hay calificaciones
- Informe 10Documento26 páginasInforme 10carlosAún no hay calificaciones
- Ep (D-O)Documento3 páginasEp (D-O)JosueFigueroaAún no hay calificaciones
- Toaz - Info Instalacion Arranque e Inversion de Marcha Del Motor Asincrono Trifasico Con Con PRDocumento8 páginasToaz - Info Instalacion Arranque e Inversion de Marcha Del Motor Asincrono Trifasico Con Con PRLuis Alberto Negron AllendeAún no hay calificaciones
- Inversor de GiroDocumento6 páginasInversor de GiroCarlos MuñozAún no hay calificaciones
- Informe de Laboratorio N°4 - Maquinas Electricas 3 PDFDocumento7 páginasInforme de Laboratorio N°4 - Maquinas Electricas 3 PDFMax MolinaAún no hay calificaciones
- Gestión ambiental en la fabricación de pisos cerámicosDocumento11 páginasGestión ambiental en la fabricación de pisos cerámicosVictor HernandezAún no hay calificaciones
- Caso de Estudio La Migueleña - Gestión Ambiental2.1Documento13 páginasCaso de Estudio La Migueleña - Gestión Ambiental2.1Victor HernandezAún no hay calificaciones
- Ce#2 DRD PL201858 QG200979Documento27 páginasCe#2 DRD PL201858 QG200979Victor HernandezAún no hay calificaciones
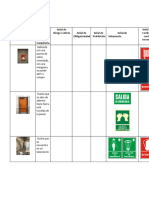
- Formato de Señaletica (Autoguardado)Documento2 páginasFormato de Señaletica (Autoguardado)Victor HernandezAún no hay calificaciones
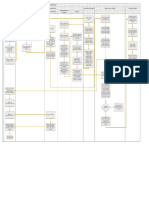
- Flujograma de Proceso Abastecimiento de Equipos, Repuestos y AccesoriosDocumento1 páginaFlujograma de Proceso Abastecimiento de Equipos, Repuestos y AccesoriosVictor HernandezAún no hay calificaciones
- Venta de Gas Propano San JoaquínDocumento3 páginasVenta de Gas Propano San JoaquínVictor HernandezAún no hay calificaciones
- Taller Sobre Las Teorias de La Motivacion HumanaDocumento1 páginaTaller Sobre Las Teorias de La Motivacion HumanaVictor HernandezAún no hay calificaciones
- RutasDocumento15 páginasRutasVictor HernandezAún no hay calificaciones
- Taller 1 Mi PreguntaDocumento1 páginaTaller 1 Mi PreguntaVictor HernandezAún no hay calificaciones
- Tarea1 Alfaro Abarca Portillo Valencia Lopez CastroDocumento5 páginasTarea1 Alfaro Abarca Portillo Valencia Lopez CastroVictor HernandezAún no hay calificaciones
- Ejemplos de Gestión de Calidad TotalDocumento2 páginasEjemplos de Gestión de Calidad TotalVictor HernandezAún no hay calificaciones
- Tarea para MañanaDocumento2 páginasTarea para MañanaVictor HernandezAún no hay calificaciones
- GeneralidadesDocumento2 páginasGeneralidadesVictor HernandezAún no hay calificaciones
- PYC - DRD - Plan de ExportacionDocumento2 páginasPYC - DRD - Plan de ExportacionVictor HernandezAún no hay calificaciones
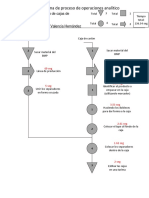
- Diagrama de Proceso AnaliticoDocumento1 páginaDiagrama de Proceso AnaliticoVictor HernandezAún no hay calificaciones
- Carta UDocumento3 páginasCarta UVictor HernandezAún no hay calificaciones
- OperacionesDocumento1 páginaOperacionesVictor HernandezAún no hay calificaciones
- Causas del incumplimiento de especificación en el peso del cementoDocumento1 páginaCausas del incumplimiento de especificación en el peso del cementoVictor HernandezAún no hay calificaciones
- Análisis costos modalidades transporteDocumento1 páginaAnálisis costos modalidades transporteVictor HernandezAún no hay calificaciones
- OSARTECDocumento1 páginaOSARTECVictor HernandezAún no hay calificaciones
- Primer Avance para El Proyeto de CatedraDocumento3 páginasPrimer Avance para El Proyeto de CatedraVictor HernandezAún no hay calificaciones
- Conversion TransporteDocumento1 páginaConversion TransporteVictor HernandezAún no hay calificaciones
- Caso de Estudio Piso CerámicoDocumento12 páginasCaso de Estudio Piso CerámicoVictor HernandezAún no hay calificaciones
- Análisis de la huella de carbono en hogares salvadoreñosDocumento23 páginasAnálisis de la huella de carbono en hogares salvadoreñosVictor HernandezAún no hay calificaciones
- Actividad Virtual 1Documento1 páginaActividad Virtual 1Victor HernandezAún no hay calificaciones
- Caso de Estudio 2Documento10 páginasCaso de Estudio 2Victor HernandezAún no hay calificaciones
- Punto 3 NMDocumento1 páginaPunto 3 NMVictor HernandezAún no hay calificaciones
- 6 y 9Documento2 páginas6 y 9Victor HernandezAún no hay calificaciones
- Introducción Proyecto EINDocumento1 páginaIntroducción Proyecto EINVictor HernandezAún no hay calificaciones
- Guia 4Documento18 páginasGuia 4Victor HernandezAún no hay calificaciones
- Programación Instalaciones Electricas DomiciliariasDocumento9 páginasProgramación Instalaciones Electricas Domiciliariasrolando aquinoAún no hay calificaciones
- Guia Formulación Proyecto Etapa 2Documento2 páginasGuia Formulación Proyecto Etapa 2Jorge Samuel Diaz OrsolaAún no hay calificaciones
- Procesador Esta Trabajando Al 100%, Por Que - ResueltoDocumento13 páginasProcesador Esta Trabajando Al 100%, Por Que - ResueltoVeimar Málaga RiverosAún no hay calificaciones
- V2 Dibujar Raplim MNS 2022b ESTDocumento48 páginasV2 Dibujar Raplim MNS 2022b ESTVictor Manuel Pulido GallegoAún no hay calificaciones
- Configuración ECM PerkinsDocumento13 páginasConfiguración ECM PerkinsJose Villarreal Boyano100% (1)
- Manual de Usuario Del Holter de Arritmia Contec TLC9803Documento54 páginasManual de Usuario Del Holter de Arritmia Contec TLC9803Edward MoralesAún no hay calificaciones
- Ingeniería Industrial 0258-5960: Issn: Revistaii@ind - Cujae.edu - CuDocumento9 páginasIngeniería Industrial 0258-5960: Issn: Revistaii@ind - Cujae.edu - Cuarq.mario.lalo.sanchezAún no hay calificaciones
- Grupo 7 Taller HTMLDocumento6 páginasGrupo 7 Taller HTMLJosueth Castillo VeraAún no hay calificaciones
- Tp04 2021 SyODocumento5 páginasTp04 2021 SyOMicaela PáezAún no hay calificaciones
- Sistema de Información GeográficaDocumento23 páginasSistema de Información Geográficaangel quispe tallaAún no hay calificaciones
- Tutorial 02 PLCDocumento23 páginasTutorial 02 PLCTete GoriAún no hay calificaciones
- Docsity Solucionario Del Libro Fundamentos de Manufactura Moderna 3edi 3Documento12 páginasDocsity Solucionario Del Libro Fundamentos de Manufactura Moderna 3edi 3Jennifer Nicol SanchezAún no hay calificaciones
- Software Libre Gretl - Regresion USACH 2022Documento16 páginasSoftware Libre Gretl - Regresion USACH 2022Camila Retamal ValenzuelaAún no hay calificaciones
- Naed Naed-318 FormatoalumnotrabajofinalDocumento12 páginasNaed Naed-318 FormatoalumnotrabajofinalLuis FernandoAún no hay calificaciones
- HARDWARE AbcDocumento11 páginasHARDWARE AbcCarlos Fernando GarciaAún no hay calificaciones
- Transporte de Córdoba: El Comunicado de La Empresa Encargada de Red BusDocumento2 páginasTransporte de Córdoba: El Comunicado de La Empresa Encargada de Red BusCadena 3Aún no hay calificaciones
- Bucket Sort AODocumento11 páginasBucket Sort AOYael Camacho Juarez100% (1)
- 11.servicios WebDocumento14 páginas11.servicios WebEquisdeAún no hay calificaciones
- Introducción a la visualización de datos con Google Data StudioDocumento3 páginasIntroducción a la visualización de datos con Google Data StudioJesus Percy Nazario PortilaAún no hay calificaciones
- TPC 11-Introduccion Al Cplusplus PDFDocumento12 páginasTPC 11-Introduccion Al Cplusplus PDFNicolas SargoAún no hay calificaciones
- Anexo 2 - Normas y Procedimientos Contratas - VFDocumento495 páginasAnexo 2 - Normas y Procedimientos Contratas - VFJesus Alberto BarreraAún no hay calificaciones
- Manual de Enrolamiento de Token Mobilepass WindowsDocumento15 páginasManual de Enrolamiento de Token Mobilepass WindowsJazmin Rodriguez GrandeAún no hay calificaciones
- Cronología Del Procesador de 64 BitsDocumento3 páginasCronología Del Procesador de 64 Bitsapi-3712810Aún no hay calificaciones
- Portafolio Mis EvidenciasDocumento1 páginaPortafolio Mis EvidenciasJulian MendezAún no hay calificaciones
- Autoevaluacion 05Documento3 páginasAutoevaluacion 05frank floresAún no hay calificaciones
- PTARSS-HSE-FO-001 Manejo de Fauna SilvestreDocumento1 páginaPTARSS-HSE-FO-001 Manejo de Fauna SilvestreMauricio Galván GómezAún no hay calificaciones
- Actividad 1 Adrian LuceroDocumento8 páginasActividad 1 Adrian LuceroAdrian LuceroAún no hay calificaciones
- Cotizacion Andina Actualizada...Documento21 páginasCotizacion Andina Actualizada...siber siberAún no hay calificaciones
- Acta N.PDF Reunion Virtual 4 Fondo EsperanzaDocumento2 páginasActa N.PDF Reunion Virtual 4 Fondo EsperanzaAzmabeth Césped RetamalAún no hay calificaciones