0% encontró este documento útil (0 votos)
306 vistas44 páginasFundamentos de La Robotica
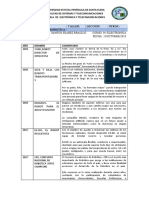
El documento presenta una introducción a la historia de los robots, comenzando con antecedentes históricos como los autómatas griegos y mecanismos animados de la antigüedad. Luego describe el desarrollo de los primeros robots industriales a gran escala en la mitad del siglo XX, así como hitos importantes en el desarrollo de la robótica como el primer robot programable creado por Unimation en 1961. Finalmente, resume avances clave en robótica manipulable e industrial en las décadas de 1950 y 1960.
Cargado por
Luis ÁvilaDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd
0% encontró este documento útil (0 votos)
306 vistas44 páginasFundamentos de La Robotica
El documento presenta una introducción a la historia de los robots, comenzando con antecedentes históricos como los autómatas griegos y mecanismos animados de la antigüedad. Luego describe el desarrollo de los primeros robots industriales a gran escala en la mitad del siglo XX, así como hitos importantes en el desarrollo de la robótica como el primer robot programable creado por Unimation en 1961. Finalmente, resume avances clave en robótica manipulable e industrial en las décadas de 1950 y 1960.
Cargado por
Luis ÁvilaDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd