También podría gustarte
- Practica2 PID ModificadoDocumento20 páginasPractica2 PID ModificadoEnrique Romero BlancoAún no hay calificaciones
- Informe Antiwindup-Grupo 05Documento20 páginasInforme Antiwindup-Grupo 05Israel Silvestre Aguilar QuispeAún no hay calificaciones
- Control PID MáquinasDocumento13 páginasControl PID MáquinasDarwin GarciaAún no hay calificaciones
- UNIDAD - 3 - CONTROL DE PROCESOS SESION - 6 - 2 - Sintonia - de - Controladores - Método de Ziegler Nichols - Curva - ReacciónDocumento19 páginasUNIDAD - 3 - CONTROL DE PROCESOS SESION - 6 - 2 - Sintonia - de - Controladores - Método de Ziegler Nichols - Curva - ReacciónJhimmy Jhoel Crisostomo PomaAún no hay calificaciones
- Control PidDocumento11 páginasControl PidLuisAlfredoPerezAún no hay calificaciones
- Control PIDDocumento6 páginasControl PIDFrânçïsçô DâvïdAún no hay calificaciones
- Criterios para La Selección de Un ControladorDocumento4 páginasCriterios para La Selección de Un ControladorIlse Mariel Rodríguez SandovalAún no hay calificaciones
- Controlador Pid para Una BalanzaDocumento5 páginasControlador Pid para Una BalanzaKevin GuerreroAún no hay calificaciones
- Unidad 4Documento24 páginasUnidad 4rutila55Aún no hay calificaciones
- Análisis de los efectos del control PID en sistemasDocumento10 páginasAnálisis de los efectos del control PID en sistemasFrancisco MarinAún no hay calificaciones
- Pid de Control de TemperaturaDocumento22 páginasPid de Control de TemperaturaJavier Mena50% (2)
- Practica 5 Sintonía de Los ControladoresDocumento29 páginasPractica 5 Sintonía de Los ControladoresJaneth ReyesAún no hay calificaciones
- Controladores PidDocumento15 páginasControladores PidAaron MedinaAún no hay calificaciones
- Controlado D T Por PidDocumento7 páginasControlado D T Por PidPaúl García100% (1)
- Control de temperatura con PIDDocumento30 páginasControl de temperatura con PIDAlejandro LeonAún no hay calificaciones
- Cuestionario CONTROLADORESDocumento5 páginasCuestionario CONTROLADORESAbezaid Gamez100% (1)
- Control Analogico de La Velocidad de Un Motor DCDocumento7 páginasControl Analogico de La Velocidad de Un Motor DCFernando PatricioAún no hay calificaciones
- Kevin Javier Cpef1020201Documento4 páginasKevin Javier Cpef1020201Kevin Javier QuispeAún no hay calificaciones
- Control PID: Metodología y AplicacionesDocumento9 páginasControl PID: Metodología y AplicacionesLeonardo CadenaAún no hay calificaciones
- Tarea 1 Introducción Al Control PredictivoDocumento3 páginasTarea 1 Introducción Al Control PredictivoEdgar LedezmaAún no hay calificaciones
- Tarea10.1 EdgarHernandez 31411239Documento6 páginasTarea10.1 EdgarHernandez 31411239Edgar HernandezAún no hay calificaciones
- Introducción Al Control AutomáticoDocumento33 páginasIntroducción Al Control AutomáticoKaterin R GarciaAún no hay calificaciones
- 33 Control IiDocumento14 páginas33 Control IiPt farrgiAún no hay calificaciones
- Capitulo 1 ModificadoDocumento10 páginasCapitulo 1 ModificadodanixaAún no hay calificaciones
- Ensayo Sobre Controladores PIDDocumento4 páginasEnsayo Sobre Controladores PIDWilfredo FigueroaAún no hay calificaciones
- CONTROLADORESDocumento6 páginasCONTROLADORESEstudiantilAún no hay calificaciones
- Control PID: Definición, Partes y AplicacionesDocumento6 páginasControl PID: Definición, Partes y AplicacionesAbiu Rosales0% (2)
- Diseño de controladores PIDDocumento8 páginasDiseño de controladores PIDChuy LopezAún no hay calificaciones
- Control AnticipativoDocumento8 páginasControl AnticipativoErickBaruchChavezSerranoAún no hay calificaciones
- Zavala Fernandez Inv Nucamendi 2021Documento26 páginasZavala Fernandez Inv Nucamendi 2021Edgar ZavalsAún no hay calificaciones
- Estructuras Avanzadas de ControlDocumento7 páginasEstructuras Avanzadas de ControlJorge Ignacio Gonzalez CanoAún no hay calificaciones
- Control Óptimo y ControlDocumento52 páginasControl Óptimo y Controljonathan mendozaAún no hay calificaciones
- Instrumentacion y ControlDocumento44 páginasInstrumentacion y ControlPerlaMarinAún no hay calificaciones
- Diapositivas ExposiciónDocumento12 páginasDiapositivas ExposiciónIsrael Silvestre Aguilar QuispeAún no hay calificaciones
- Preguntas de ControlDocumento5 páginasPreguntas de ControlRicardo Zaoldyeck Tapia Robledo100% (2)
- TextilDocumento21 páginasTextilVin Baker LariosAún no hay calificaciones
- IyCdPdPM PMQ-2022I L4Documento4 páginasIyCdPdPM PMQ-2022I L4ALEXANDRA CENTENO GALLEGOSAún no hay calificaciones
- Control Automatico 406 - Tarea 1 PDFDocumento12 páginasControl Automatico 406 - Tarea 1 PDFGustavo BarciaAún no hay calificaciones
- Controlador proporcional Universidad San Carlos GuatemalaDocumento8 páginasControlador proporcional Universidad San Carlos GuatemalaEddy CutzalAún no hay calificaciones
- Practica 1 Sistemas DigitalesDocumento17 páginasPractica 1 Sistemas DigitalesCarlos Arturo MasyRubiAún no hay calificaciones
- Sistema Universitario Jose Vasconcelos "Plantel Murua"Documento6 páginasSistema Universitario Jose Vasconcelos "Plantel Murua"OchoaAún no hay calificaciones
- Practica 8 LABO DE TEORIA DE CONTROL UNAMDocumento14 páginasPractica 8 LABO DE TEORIA DE CONTROL UNAMMiguel GuerreroAún no hay calificaciones
- Introducción Al Control de Procesos PDFDocumento31 páginasIntroducción Al Control de Procesos PDFGerMan JoelAún no hay calificaciones
- Acciones Basicas de ControlDocumento36 páginasAcciones Basicas de Controlcarlitrosgimeneza100% (5)
- Informe - U2 - Electroneumática - Técnica Proporcional - Peralvo - Quinga - ValenciaDocumento6 páginasInforme - U2 - Electroneumática - Técnica Proporcional - Peralvo - Quinga - ValenciaCristian AndrésAún no hay calificaciones
- Control de Procesos (Informe)Documento6 páginasControl de Procesos (Informe)Jose Pineda GuzmanAún no hay calificaciones
- Tecnicas de Control de Chancadoras.Documento12 páginasTecnicas de Control de Chancadoras.marcos ruizAún no hay calificaciones
- Preinforme ControlDocumento7 páginasPreinforme ControlJuan CortésAún no hay calificaciones
- Generalidades de InstrumentaciónDocumento7 páginasGeneralidades de InstrumentaciónLia MorenoAún no hay calificaciones
- Binp U2 Ea MagpDocumento9 páginasBinp U2 Ea MagpAngeles GrajalesAún no hay calificaciones
- Técnicas de control en procesos químicosDocumento20 páginasTécnicas de control en procesos químicosSantiagoFdezAún no hay calificaciones
- Reporte Fina ControlDocumento14 páginasReporte Fina ControlmartinAún no hay calificaciones
- Qué Es Un Controlador PIDDocumento3 páginasQué Es Un Controlador PIDBrandon EscobarAún no hay calificaciones
- Práctica Control de Temperatura de Un Reactor en Lazo Cerrado, Con Etapa de PrecalentamientoDocumento18 páginasPráctica Control de Temperatura de Un Reactor en Lazo Cerrado, Con Etapa de PrecalentamientoMichel Sánchez ColinAún no hay calificaciones
- Análisis de sistemas dinámicos con controladores PIDDocumento9 páginasAnálisis de sistemas dinámicos con controladores PIDOscar BonillaAún no hay calificaciones
- Teoria de Control y RoboticaDocumento11 páginasTeoria de Control y RoboticaAlejandro Fernandez LeonAún no hay calificaciones
- UF1444 - Organización de las intervenciones necesarias para el mantenimiento de las instalaciones eléctricas en el entorno de edificiosDe EverandUF1444 - Organización de las intervenciones necesarias para el mantenimiento de las instalaciones eléctricas en el entorno de edificiosAún no hay calificaciones
- Instrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108De EverandInstrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108Aún no hay calificaciones
- Mantenimiento de redes eléctricas subterráneas de alta tensión. ELEE0209De EverandMantenimiento de redes eléctricas subterráneas de alta tensión. ELEE0209Calificación: 2 de 5 estrellas2/5 (1)
- UF0163 - Mantenimiento básico de instalacionesDe EverandUF0163 - Mantenimiento básico de instalacionesAún no hay calificaciones
- Formato RevisthjhghDocumento3 páginasFormato RevisthjhghEsteban BeltranAún no hay calificaciones
- Sensor Optoelectrónico para La Corrección Automática Del Factor de Potencia en Equipos de InducciónDocumento72 páginasSensor Optoelectrónico para La Corrección Automática Del Factor de Potencia en Equipos de Inducciónfabian pachecoAún no hay calificaciones
- Martinez 2010 InversormoduladoporanchodepulsoanchodepulDocumento7 páginasMartinez 2010 InversormoduladoporanchodepulsoanchodepulRaynerAún no hay calificaciones
- Cálculo del núcleo del transformador: ecuaciones y dimensionamientoDocumento46 páginasCálculo del núcleo del transformador: ecuaciones y dimensionamientofabian pachecoAún no hay calificaciones
- Diagrama de BloquesDocumento6 páginasDiagrama de Bloquesfabian pachecoAún no hay calificaciones
- T Espe 044014Documento232 páginasT Espe 044014fabian pachecoAún no hay calificaciones
- Trabajo TransforDocumento19 páginasTrabajo Transforfabian pachecoAún no hay calificaciones
- Universidad Tecnológica Equinoccial: Facultad de Ciencias de La Ingeniería Carrera de Ingeniería MecatrónicaDocumento101 páginasUniversidad Tecnológica Equinoccial: Facultad de Ciencias de La Ingeniería Carrera de Ingeniería Mecatrónicafabian pachecoAún no hay calificaciones
- Diseño de Control Automático para Corrección Del Factor de PotenciaDocumento102 páginasDiseño de Control Automático para Corrección Del Factor de Potenciafabian pachecoAún no hay calificaciones
- Cuadro de CargasDocumento4 páginasCuadro de Cargasfabian pachecoAún no hay calificaciones
- Cortes Rios Cristhian Camilo 2020Documento71 páginasCortes Rios Cristhian Camilo 2020fabian pachecoAún no hay calificaciones
- 2368757.pdf File PDFDocumento70 páginas2368757.pdf File PDFfabian pachecoAún no hay calificaciones
- ENTRADocumento4 páginasENTRAfabian pachecoAún no hay calificaciones
- Diseño transformador monofásico 120/40VDocumento4 páginasDiseño transformador monofásico 120/40Vfabian pachecoAún no hay calificaciones
- LucumiOrjuelaJhonHarold2017 PDFDocumento59 páginasLucumiOrjuelaJhonHarold2017 PDFfabian pachecoAún no hay calificaciones
- Electrónica de potencia, una tecnología estratégica para las energías alternativasDocumento9 páginasElectrónica de potencia, una tecnología estratégica para las energías alternativasfabian pachecoAún no hay calificaciones
- Formato RevisthjhghDocumento3 páginasFormato RevisthjhghEsteban BeltranAún no hay calificaciones
- Factura de servicios hogar con detalles de valores y formas de pagoDocumento4 páginasFactura de servicios hogar con detalles de valores y formas de pagofabian pachecoAún no hay calificaciones
- Formato RevisthjhghDocumento3 páginasFormato RevisthjhghEsteban BeltranAún no hay calificaciones
- Tema TransformadoresDocumento28 páginasTema TransformadoresEduardo Rodriguez100% (1)
- Pre Informe Transformador Monofasico Bajo CargaDocumento4 páginasPre Informe Transformador Monofasico Bajo Cargafabian pachecoAún no hay calificaciones
- Informe de La Planta Kama 6500tDocumento6 páginasInforme de La Planta Kama 6500tfabian pachecoAún no hay calificaciones
- Img 20190313 0001Documento1 páginaImg 20190313 0001fabian pachecoAún no hay calificaciones
- Retilap Resolucion 181331Documento246 páginasRetilap Resolucion 181331melcieso1959Aún no hay calificaciones
- Apto 101 Existente Apto 102 NuevoDocumento1 páginaApto 101 Existente Apto 102 Nuevofabian pachecoAún no hay calificaciones
- Electrónica de potencia, una tecnología estratégica para las energías alternativasDocumento9 páginasElectrónica de potencia, una tecnología estratégica para las energías alternativasfabian pachecoAún no hay calificaciones
- Conceptos para Iluminación de Canchas DeportivasDocumento6 páginasConceptos para Iluminación de Canchas DeportivasBenjamín Cares Zalazar100% (1)
- Boletin 21 Y 22 Febrero 2017Documento3 páginasBoletin 21 Y 22 Febrero 2017fabian pachecoAún no hay calificaciones
- Proyecto de Iluminacion de EstadioDocumento15 páginasProyecto de Iluminacion de EstadioJordan KhouryAún no hay calificaciones
- DocumentosDocumento3 páginasDocumentosfabian pachecoAún no hay calificaciones
- EnacomDocumento11 páginasEnacomCrónicaAún no hay calificaciones
- Informe Energía Solar FotovoltaicaDocumento8 páginasInforme Energía Solar FotovoltaicaCristhian BeltranAún no hay calificaciones
- Calidad en ProyectoDocumento5 páginasCalidad en ProyectoCheryd Leiva RuizAún no hay calificaciones
- Pensamiento Integracionista de BolívarDocumento3 páginasPensamiento Integracionista de BolívarYenisAún no hay calificaciones
- Areas Verdes de La EscuelaDocumento32 páginasAreas Verdes de La EscuelaPatricia100% (1)
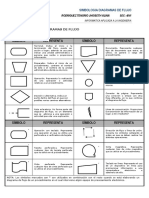
- S6 - Dip - 2021 - T3.2 - MD - Simbolos de Flujograma PDFDocumento1 páginaS6 - Dip - 2021 - T3.2 - MD - Simbolos de Flujograma PDFKevin GuzmanAún no hay calificaciones
- Análisis de SensibilidadDocumento2 páginasAnálisis de Sensibilidadedwin briosoAún no hay calificaciones
- Organo de La VisionDocumento33 páginasOrgano de La Visionjunior pinedaAún no hay calificaciones
- Psicologia - Introduccion A Las Nociones FundamentalesDocumento93 páginasPsicologia - Introduccion A Las Nociones FundamentalesMike MunozAún no hay calificaciones
- SST - FormatosDocumento17 páginasSST - FormatosMichel Bonilla BedoyaAún no hay calificaciones
- AmicaDocumento4 páginasAmicaGuayaquil 707Aún no hay calificaciones
- Sistemas Flex Unido - MergedDocumento316 páginasSistemas Flex Unido - MergedauxiliarsgiilkingenieriasasAún no hay calificaciones
- Guia Proyectos de GestiónDocumento39 páginasGuia Proyectos de GestiónYulieth PerdomoAún no hay calificaciones
- SUPERFLEXDocumento5 páginasSUPERFLEXYESIDAVILAAún no hay calificaciones
- Agua Desde EcoescuelasDocumento22 páginasAgua Desde EcoescuelasJUAN MANUEL GUERREROAún no hay calificaciones
- Ficha Trabajo 5toDocumento3 páginasFicha Trabajo 5toMary LuzAún no hay calificaciones
- Apuntes T.2 Impacto AmbientalDocumento19 páginasApuntes T.2 Impacto AmbientalSomeAún no hay calificaciones
- ODEC 5to Grado PDFDocumento430 páginasODEC 5to Grado PDFGladys Moreno83% (24)
- Taller 1 de Filosofia JoseDocumento4 páginasTaller 1 de Filosofia Joserinabarraa possoAún no hay calificaciones
- Ferronet: Uso ProfesionalDocumento6 páginasFerronet: Uso ProfesionalPierre BachelartAún no hay calificaciones
- Informe Topo 1 Por SiDocumento10 páginasInforme Topo 1 Por SiZoila MuzoAún no hay calificaciones
- ESPECIACIÓN (Autoguardado)Documento39 páginasESPECIACIÓN (Autoguardado)DEISY PALACIOSAún no hay calificaciones
- Investigacion de ExpocisionDocumento3 páginasInvestigacion de ExpocisionKirstie GarciaAún no hay calificaciones
- Seguidor de Linea Dispo555Documento6 páginasSeguidor de Linea Dispo555Joseph Moreno GutierrezAún no hay calificaciones
- Conectores, Marcadores o Elementos de EnlaceDocumento3 páginasConectores, Marcadores o Elementos de EnlaceThomas Vázquez AcuñaAún no hay calificaciones
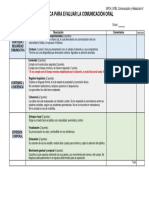
- Rubrica para Calificar La Comunicación OralDocumento1 páginaRubrica para Calificar La Comunicación OralLayda Chara RoblesAún no hay calificaciones
- Métodos GravimétricosDocumento21 páginasMétodos Gravimétricosdajhan galeanoAún no hay calificaciones
- Estilos de Dirección y Ética EmpresarialDocumento56 páginasEstilos de Dirección y Ética EmpresarialHector MateoAún no hay calificaciones
- Informe Tecnico N03 - Analisis InstrumentalDocumento11 páginasInforme Tecnico N03 - Analisis Instrumentalalessandra nuñez santiagoAún no hay calificaciones
- Preguntas Seguridad V 1Documento7 páginasPreguntas Seguridad V 1sergio diazAún no hay calificaciones