También podría gustarte
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- Control en cascada y feedforwardDocumento23 páginasControl en cascada y feedforwardVictorAún no hay calificaciones
- Fase3 DinamicosDocumento12 páginasFase3 DinamicosJorge OrozcoAún no hay calificaciones
- Informe Simulación. (04-06)Documento20 páginasInforme Simulación. (04-06)Manuel CaceresAún no hay calificaciones
- Solucionario Ef-Ee615m 2020 1Documento4 páginasSolucionario Ef-Ee615m 2020 1Anthony A NavarroAún no hay calificaciones
- Sistema de Control - Tarea N°2Documento46 páginasSistema de Control - Tarea N°2Pablo RiquelmeAún no hay calificaciones
- Tarea 2.1 CaroDocumento14 páginasTarea 2.1 CaroDaniel PancheAún no hay calificaciones
- Guía N°4 - Matlab - SHN115Documento10 páginasGuía N°4 - Matlab - SHN115Frank ManciaAún no hay calificaciones
- Trabajo Colaborativo 1 Grupo 203040 - 2.docx Control AnalogoDocumento16 páginasTrabajo Colaborativo 1 Grupo 203040 - 2.docx Control AnalogoGademaraAún no hay calificaciones
- Diseño de Sistemas Reguladores ObservaDocumento22 páginasDiseño de Sistemas Reguladores ObservaJean Pierre Alcantara AlvaradoAún no hay calificaciones
- P5 CP CautomaticoDocumento5 páginasP5 CP CautomaticoSebastian CachiguangoAún no hay calificaciones
- Laboratorio N°2 Diseño de Controlador Con LGRDocumento16 páginasLaboratorio N°2 Diseño de Controlador Con LGRnelsonAún no hay calificaciones
- E1 33 Luis Stiven PulgarinDocumento12 páginasE1 33 Luis Stiven PulgarinStevan CalatarAún no hay calificaciones
- FASE 4 Grupo 243005 44Documento31 páginasFASE 4 Grupo 243005 44Duvan RuizAún no hay calificaciones
- Informe Segundo Parcial ControlDocumento21 páginasInforme Segundo Parcial ControlAndrés SolísAún no hay calificaciones
- AR17010 Modelo4 Grupo01 ProyectodeCicloDocumento35 páginasAR17010 Modelo4 Grupo01 ProyectodeCicloEnmanuel UmanzorAún no hay calificaciones
- Salazar Evelyn Informe1.1 10006Documento17 páginasSalazar Evelyn Informe1.1 10006Evelyn SalazarAún no hay calificaciones
- Diseño de sistemas reguladores con observadores de estado para seguimiento de referenciasDocumento41 páginasDiseño de sistemas reguladores con observadores de estado para seguimiento de referenciasMax100% (1)
- YA - PDF - WORD - Informe Sobre El Control PID de Un Motor DCDocumento21 páginasYA - PDF - WORD - Informe Sobre El Control PID de Un Motor DCtesla doceAún no hay calificaciones
- Reporte PracticasDocumento38 páginasReporte PracticasFelipe Pipe VRAún no hay calificaciones
- Informe Final 3 Sc-1Documento14 páginasInforme Final 3 Sc-1gersonAún no hay calificaciones
- Sistemas de Control de Un AvionDocumento7 páginasSistemas de Control de Un AvionFernanda MorenoAún no hay calificaciones
- Res T06-P03Documento10 páginasRes T06-P03antonioAún no hay calificaciones
- Trab Inv U5 ArteagaGarciaDocumento6 páginasTrab Inv U5 ArteagaGarciaRaul Alexis GarciaAún no hay calificaciones
- Ecualizador CircuitoDocumento19 páginasEcualizador CircuitoianAún no hay calificaciones
- Informe Ejercicios 7-1a7 4Documento18 páginasInforme Ejercicios 7-1a7 4Steven Boris Soriano CláudioAún no hay calificaciones
- EXAMEN PARCIAL DE SISTEMA DE CONTROL 02TDocumento8 páginasEXAMEN PARCIAL DE SISTEMA DE CONTROL 02TPepe_Cardenas2Aún no hay calificaciones
- Circuito RLC. Respuesta DinamicaDocumento15 páginasCircuito RLC. Respuesta DinamicaSebasAún no hay calificaciones
- Guía N°4 - Matlab - SHN115Documento11 páginasGuía N°4 - Matlab - SHN115Ricardo MartinezAún no hay calificaciones
- Tarea 3 - Diseñar Compensadores Según Respuesta en Frecuencia y Sintonización de Controladores.Documento18 páginasTarea 3 - Diseñar Compensadores Según Respuesta en Frecuencia y Sintonización de Controladores.Sneider Alvarez100% (1)
- # 1 Modelado MatemáticoDocumento33 páginas# 1 Modelado MatemáticoSamuel Granados MejíaAún no hay calificaciones
- Lab 2Documento45 páginasLab 2Lenny RayssaAún no hay calificaciones
- Laboratorio 05Documento10 páginasLaboratorio 05Nick Stiven Aguilar HuarangaAún no hay calificaciones
- Tarea 2 de Circuitos RC y La RLCDocumento6 páginasTarea 2 de Circuitos RC y La RLCMia ScarlettxxAún no hay calificaciones
- Problemas de Control de ProcesosDocumento8 páginasProblemas de Control de ProcesosJUAN EDUARD SANTOS CAMPOSAún no hay calificaciones
- 203041A 764 Fase2 "Consolidado"Documento17 páginas203041A 764 Fase2 "Consolidado"Esneyder QuevedoAún no hay calificaciones
- Compensador de Adelanto AtrasoDocumento13 páginasCompensador de Adelanto AtrasoDiego AvalosAún no hay calificaciones
- Capítulo 3 EE647 Parte 4Documento15 páginasCapítulo 3 EE647 Parte 4neyen rafael estebanAún no hay calificaciones
- Fase3 Juan Romero 243005a 1394Documento8 páginasFase3 Juan Romero 243005a 1394jcromero1708Aún no hay calificaciones
- Modelado de Motores CCDocumento14 páginasModelado de Motores CCKevin Pato MosqueraAún no hay calificaciones
- CM 2 V1 1842579 6Documento4 páginasCM 2 V1 1842579 6Serna ReynaAún no hay calificaciones
- Tarea 4 Grupo 3Documento29 páginasTarea 4 Grupo 3fredy pertuzAún no hay calificaciones
- 2diseño de Controladores P e IDocumento14 páginas2diseño de Controladores P e IGean Pierre Medina palacinAún no hay calificaciones
- JFET modelo señal pequeñaDocumento8 páginasJFET modelo señal pequeñaarios SAún no hay calificaciones
- Morocho-Sanchez Practica 7Documento13 páginasMorocho-Sanchez Practica 7Wilson MorochoAún no hay calificaciones
- Laboratorio 4 Redes LLDocumento12 páginasLaboratorio 4 Redes LLFelipe SepúlvedaAún no hay calificaciones
- Problemas de Control I - 2019 B PDFDocumento6 páginasProblemas de Control I - 2019 B PDFXavier Palacios0% (1)
- lAB 2Documento34 páginaslAB 2Juan Gustavo Davila FloresAún no hay calificaciones
- Lab.1 Control No Lineal Por Realimentación de Estados de Nivel de Tanques InterconectadosDocumento9 páginasLab.1 Control No Lineal Por Realimentación de Estados de Nivel de Tanques InterconectadosOmar Ruiz Rodríguez100% (1)
- Análisis de un sistema de control de nivel de tanque con lazo abierto y cerrado en SimulinkDocumento7 páginasAnálisis de un sistema de control de nivel de tanque con lazo abierto y cerrado en SimulinkJuuaanchoo CnnzAún no hay calificaciones
- Ejercicio Ilustrativo CSTRDocumento23 páginasEjercicio Ilustrativo CSTRGuarayo Ormachea AlejandroAún no hay calificaciones
- Métodos Matriciales para ingenieros con MATLABDe EverandMétodos Matriciales para ingenieros con MATLABCalificación: 5 de 5 estrellas5/5 (1)
- Informe de La Maquina Fortuna 1000Documento1 páginaInforme de La Maquina Fortuna 1000jimAún no hay calificaciones
- Informe de La Maquina Empaquetadora Fortuna 1000Documento1 páginaInforme de La Maquina Empaquetadora Fortuna 1000jimAún no hay calificaciones
- Minuta de Reuniones 22 de Junio Del 2021Documento1 páginaMinuta de Reuniones 22 de Junio Del 2021jimAún no hay calificaciones
- Descripcion de Los ComponentesDocumento3 páginasDescripcion de Los ComponentesjimAún no hay calificaciones
- Descripcion de Los ComponentesDocumento3 páginasDescripcion de Los ComponentesjimAún no hay calificaciones
- Presiona Hasta Aparezca en El Display Par 2Documento1 páginaPresiona Hasta Aparezca en El Display Par 2jimAún no hay calificaciones
- Control IndustrialDocumento20 páginasControl Industrialdeibel navarroAún no hay calificaciones
- Unidad 2 Ajuste de ControladoresDocumento29 páginasUnidad 2 Ajuste de ControladoresjimAún no hay calificaciones
- Sintonizacion de ControladoresDocumento21 páginasSintonizacion de ControladoresZ Erandi Cortes RodriguezAún no hay calificaciones
- Sintonización de controladores para proceso de primer ordenDocumento2 páginasSintonización de controladores para proceso de primer ordenjimAún no hay calificaciones
- Webinar Métodos Tuning PIDDocumento93 páginasWebinar Métodos Tuning PIDjimAún no hay calificaciones
- InformeDocumento22 páginasInformejimAún no hay calificaciones
- ControlDocumento18 páginasControljimAún no hay calificaciones
- Control de Cascada y RealimentaciónDocumento30 páginasControl de Cascada y RealimentaciónjimAún no hay calificaciones
- Asignacion 3 CEINGUC 2021Documento4 páginasAsignacion 3 CEINGUC 2021jimAún no hay calificaciones
- Unidad 3 Control en CascadaDocumento24 páginasUnidad 3 Control en CascadajimAún no hay calificaciones
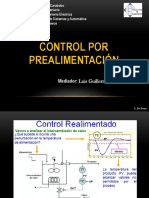
- Unidad 4 Control Por PrealimentacionDocumento15 páginasUnidad 4 Control Por PrealimentacionjimAún no hay calificaciones
- Instrumentación UNIDAD 4Documento14 páginasInstrumentación UNIDAD 4Alexis RomeroAún no hay calificaciones
- LIVE Script-Practica 2Documento2 páginasLIVE Script-Practica 2Maria Fernanda SandovalAún no hay calificaciones
- TFG GRALL Part03-1Documento131 páginasTFG GRALL Part03-1Lizbeth GómezAún no hay calificaciones
- Instrumentación Hoy Calculo de Valvulas ModulantesDocumento37 páginasInstrumentación Hoy Calculo de Valvulas ModulantesKcho AnteloAún no hay calificaciones
- Metodos de SintonizadoresDocumento19 páginasMetodos de SintonizadoresAlan Darkness RapAún no hay calificaciones
- Módulos Embebidos DSPDocumento16 páginasMódulos Embebidos DSPChristian AgAún no hay calificaciones
- Reactor CSTRDocumento17 páginasReactor CSTRhennyAún no hay calificaciones
- Proyecto Control de Motor DCDocumento7 páginasProyecto Control de Motor DCPedro Ar MolinaAún no hay calificaciones
- Control PID continuo laboratorio 1Documento9 páginasControl PID continuo laboratorio 1Cristian Camilo Gomez TrujilloAún no hay calificaciones
- Normas Ansi-Isa FinalDocumento26 páginasNormas Ansi-Isa FinalAnthony Quispe CarbajalAún no hay calificaciones
- Marco Teorico Ecuaciones GobernantesDocumento5 páginasMarco Teorico Ecuaciones GobernantesAngela Thalia Maguiña CalvoAún no hay calificaciones
- Criterio de Routh para el análisis de estabilidad de sistemas de controlDocumento20 páginasCriterio de Routh para el análisis de estabilidad de sistemas de controlAleicarg Goddeliet100% (1)
- Control DigitalDocumento41 páginasControl DigitalHenry HeartAún no hay calificaciones
- Ejercicios 261: LibrasDocumento89 páginasEjercicios 261: LibrasCeleste PonceAún no hay calificaciones
- Control industrial: Introducción a los sistemas de control y tipos de acciones de controlDocumento13 páginasControl industrial: Introducción a los sistemas de control y tipos de acciones de controlfederico_farias_2Aún no hay calificaciones
- Controladores de TemperaturasDocumento10 páginasControladores de TemperaturasantonioAún no hay calificaciones
- Método de Ganancia Última - Dinámica de Procesos e InstrumentaciónDocumento30 páginasMétodo de Ganancia Última - Dinámica de Procesos e InstrumentaciónRichard UrbanoAún no hay calificaciones
- Laboratorio Control TemperaturaDocumento18 páginasLaboratorio Control TemperaturaritberthAún no hay calificaciones
- Control Análogo - Tarea 3Documento10 páginasControl Análogo - Tarea 3Yovana CabreraAún no hay calificaciones
- Examen Controladores PID-RafaDocumento14 páginasExamen Controladores PID-RafaRafaelLunaHuertaAún no hay calificaciones
- Tema 3Documento121 páginasTema 3leon alfredAún no hay calificaciones
- Trabajo de RoboticaDocumento39 páginasTrabajo de Roboticaerickhs10Aún no hay calificaciones
- 6 Estrategias de Control PDFDocumento63 páginas6 Estrategias de Control PDFAdolfo Piminchumo SausaAún no hay calificaciones
- Proyecto Integrador - Calculo Integral Doc 3Documento5 páginasProyecto Integrador - Calculo Integral Doc 3Juan HernandezAún no hay calificaciones
- Guia Aprendizaje 1Documento13 páginasGuia Aprendizaje 1eifer moises moreno matsonAún no hay calificaciones
- Introduccion Instrumentacion Industrial Parte 2Documento16 páginasIntroduccion Instrumentacion Industrial Parte 2Javier GomezAún no hay calificaciones
- Control Continuo Con PLCDocumento6 páginasControl Continuo Con PLCCesar Marron MattaAún no hay calificaciones
- Métodos de Sintonización en Lazo CerradoDocumento12 páginasMétodos de Sintonización en Lazo CerradoloFreDDAún no hay calificaciones
- Lab 04 Sistemas Complejos 30102021 FinalDocumento21 páginasLab 04 Sistemas Complejos 30102021 FinalJose Luis Condori PintoAún no hay calificaciones