También podría gustarte
- Diagramas y Polifonías. Experiencias de PensamientoDe EverandDiagramas y Polifonías. Experiencias de PensamientoAún no hay calificaciones
- Práctica #4 Densidad de Una Muestra de Suelo Tallada GeometricamenteDocumento14 páginasPráctica #4 Densidad de Una Muestra de Suelo Tallada GeometricamenteJennyfer Serrano100% (1)
- Vibracion Libre Con Amortiguamiento ViscosoDocumento3 páginasVibracion Libre Con Amortiguamiento ViscosoAlejandra Katherine Sanchez MezaAún no hay calificaciones
- Principio de Superposicion - Franklin Espinoza - Ing - CivilDocumento27 páginasPrincipio de Superposicion - Franklin Espinoza - Ing - CivilfranklinAún no hay calificaciones
- Semana 7 (Mmi-2019) PDFDocumento14 páginasSemana 7 (Mmi-2019) PDFLuis AlonsoAún no hay calificaciones
- FunDin Clase 07 - Cinemática Del Sólido Rígido (1) - VCLASEDocumento72 páginasFunDin Clase 07 - Cinemática Del Sólido Rígido (1) - VCLASEALVARO RAUL LEYVA BACILIOAún no hay calificaciones
- Tarea Final 3 Parcial 2 Vibraciones Libres y ForzadasDocumento4 páginasTarea Final 3 Parcial 2 Vibraciones Libres y ForzadasLothar De Loor ZapataAún no hay calificaciones
- Ingeniería civil - UANCV: Cálculo de momento resistenteDocumento11 páginasIngeniería civil - UANCV: Cálculo de momento resistenteErick Russell MirandaAún no hay calificaciones
- Adiente - Ejercicios Mate - IVDocumento7 páginasAdiente - Ejercicios Mate - IVInez SaavedraAún no hay calificaciones
- PRUEBAS TRIAXIALES DE SUELOSDocumento9 páginasPRUEBAS TRIAXIALES DE SUELOSBernard Andrés Luzardo CadenaAún no hay calificaciones
- Vigas. Equilibrio interno y externoDocumento13 páginasVigas. Equilibrio interno y externokaterina meza herreraAún no hay calificaciones
- Ejercicios de DeformaciónDocumento24 páginasEjercicios de DeformaciónLucero de la TorreAún no hay calificaciones
- Practica Calificada 3Documento8 páginasPractica Calificada 3Carlita DTAún no hay calificaciones
- Impact oDocumento9 páginasImpact oshirlynadiaAún no hay calificaciones
- Práctica dirigida trabajo y energíaDocumento2 páginasPráctica dirigida trabajo y energíaKiara CruzAún no hay calificaciones
- EDP Alpicado en CIVILDocumento23 páginasEDP Alpicado en CIVILHERMINIO JAVIER LAURAAún no hay calificaciones
- Diseño de mezcla de concreto de 280kg/cm2 para columnas utilizando el método ACI 211Documento34 páginasDiseño de mezcla de concreto de 280kg/cm2 para columnas utilizando el método ACI 211juanAún no hay calificaciones
- Nuevo Documento de Microsoft WordDocumento1 páginaNuevo Documento de Microsoft WordLeandro CuadradoAún no hay calificaciones
- Taller 3 de Ecuacion de Movimiento 2022 IIDocumento4 páginasTaller 3 de Ecuacion de Movimiento 2022 IIPipe MolanoAún no hay calificaciones
- Primer Parcial Fisica Iii 2020-1Documento14 páginasPrimer Parcial Fisica Iii 2020-1Andrea Juliana GarcíaAún no hay calificaciones
- Problemas Propuestos 1 - 2023-ADocumento4 páginasProblemas Propuestos 1 - 2023-ASam JotaAún no hay calificaciones
- Fuentes de error y formas de medir presiónDocumento2 páginasFuentes de error y formas de medir presiónDixon Antonio MaradiagaAún no hay calificaciones
- Esfuerzo cortante en vigas: Ley de CollignonDocumento11 páginasEsfuerzo cortante en vigas: Ley de CollignonRosa Benavente100% (1)
- TrabajoDocumento2 páginasTrabajoMaryorieDominguezAún no hay calificaciones
- Cinética de Cuerpos Rígidos en El PlanoDocumento9 páginasCinética de Cuerpos Rígidos en El PlanoJesus Ovalles100% (1)
- Integral Es Triples ThomasDocumento6 páginasIntegral Es Triples ThomasDiegoAún no hay calificaciones
- Aplicaciones de la integral definida para calcular áreas y volúmenesDocumento7 páginasAplicaciones de la integral definida para calcular áreas y volúmenesBelen Ronquillo100% (1)
- EDsistemas 2 PDFDocumento20 páginasEDsistemas 2 PDFLokz AlrAún no hay calificaciones
- Taller AntenasDocumento3 páginasTaller AntenasAndres Jesus Moreno Arias100% (1)
- Solucionario de Examen Parcial - EC114-G 2017-IDocumento11 páginasSolucionario de Examen Parcial - EC114-G 2017-IRENZO ANDRES VELASQUEZ LOZANOAún no hay calificaciones
- Guia Mecanismo Tema 2Documento8 páginasGuia Mecanismo Tema 2Fabio AlvarezAún no hay calificaciones
- Energia y Cantidad de MovimientoDocumento13 páginasEnergia y Cantidad de MovimientoDaniel Chavez0% (1)
- Dinamica Unc VibracionesDocumento35 páginasDinamica Unc VibracionesCésar MarinAún no hay calificaciones
- Métodos Cerrados y Abiertos PDFDocumento9 páginasMétodos Cerrados y Abiertos PDFJavier ChirúAún no hay calificaciones
- Cantidad de Movimiento Angular e Impulso AngularDocumento13 páginasCantidad de Movimiento Angular e Impulso AngularJoshua Garcia LombardiAún no hay calificaciones
- MM-2. Problemas Propuestos #03. 2021 - 2Documento2 páginasMM-2. Problemas Propuestos #03. 2021 - 2diegoAún no hay calificaciones
- Examen Parcial 1 ResueltoDocumento10 páginasExamen Parcial 1 ResueltoCarla RamirezAún no hay calificaciones
- Practica2 280264808Documento2 páginasPractica2 280264808Emilio Paredes SolisAún no hay calificaciones
- Clase 9Documento26 páginasClase 9Elias FiencoAún no hay calificaciones
- Guia de Trabajo Superficies CurvasDocumento6 páginasGuia de Trabajo Superficies CurvasRodrigo SantamaríaAún no hay calificaciones
- Cinemática Rectilínea: Posición, Velocidad y AceleraciónDocumento6 páginasCinemática Rectilínea: Posición, Velocidad y AceleraciónXIOMARA YUVIRI DIAZ CALDERONAún no hay calificaciones
- Taller de La Semana 8Documento9 páginasTaller de La Semana 8Cristian Uribe0% (1)
- Hipótesis de Navier-BernouilliDocumento2 páginasHipótesis de Navier-BernouilliKatherine Ruiz MatuteAún no hay calificaciones
- CentroideDocumento14 páginasCentroideValeria Bracho ParraAún no hay calificaciones
- Línea de gradiente para carretera en dunas de HuacachinaDocumento23 páginasLínea de gradiente para carretera en dunas de HuacachinaBryan Jallorana MarcatincoAún no hay calificaciones
- Fuerzas de presión en superficies inclinadas y curvasDocumento11 páginasFuerzas de presión en superficies inclinadas y curvasJavier CastrejonAún no hay calificaciones
- Resistencia 1 Desktop Ol6da8qDocumento101 páginasResistencia 1 Desktop Ol6da8qGregory SandoyaAún no hay calificaciones
- Formulario MecanismosDocumento1 páginaFormulario Mecanismosdan1dulcesAún no hay calificaciones
- Velocidad RadialDocumento7 páginasVelocidad RadialEdgar AlfaroAún no hay calificaciones
- Clase 2Documento22 páginasClase 2Andres GodoyAún no hay calificaciones
- Luctuala Taller 3,5Documento2 páginasLuctuala Taller 3,5Mireya LuctualaAún no hay calificaciones
- Laboratorio N°1 Mecanica de FluidosDocumento52 páginasLaboratorio N°1 Mecanica de FluidosAngelRappAún no hay calificaciones
- Informe 3 ResistenciaDocumento46 páginasInforme 3 ResistenciacarmenAún no hay calificaciones
- Problemario 3Documento6 páginasProblemario 3jonathanAún no hay calificaciones
- Taller Dinámica TraslaciónDocumento12 páginasTaller Dinámica TraslaciónFabricio Oyola TorresAún no hay calificaciones
- Ejercicios de M.fluidosDocumento5 páginasEjercicios de M.fluidosRoyer David Llanos MarinAún no hay calificaciones
- Triedro de FrenetDocumento4 páginasTriedro de Frenetedwyn changoluisaAún no hay calificaciones
- Determinación del período y respuesta dinámica de un pórtico sometido a aceleraciónDocumento11 páginasDeterminación del período y respuesta dinámica de un pórtico sometido a aceleraciónMarlon Saúl Siaden Hernández100% (1)
- Laboratorio #7 Pendulo Simple - BI010102EDocumento9 páginasLaboratorio #7 Pendulo Simple - BI010102EWilliam Jesus Cabrera MezaAún no hay calificaciones
- Ejercicios SUDocumento15 páginasEjercicios SUalfredojsm1812Aún no hay calificaciones
- Tercera de AutomatizacionDocumento23 páginasTercera de Automatizacionalfredojsm1812Aún no hay calificaciones
- Epet5 Quinto1° EstaticayResistenciaMateriales Tec Guia2Documento6 páginasEpet5 Quinto1° EstaticayResistenciaMateriales Tec Guia2alfredojsm1812Aún no hay calificaciones
- Tercera Asignacion Dinamica de MaquinasDocumento16 páginasTercera Asignacion Dinamica de Maquinasalfredojsm1812Aún no hay calificaciones
- Planilla de Calculo de Eje Segun ASMEDocumento3 páginasPlanilla de Calculo de Eje Segun ASMEalfredojsm1812Aún no hay calificaciones
- Sistemas LógicosDocumento7 páginasSistemas Lógicosalfredojsm1812Aún no hay calificaciones
- Electiva II Tema III FallasDocumento9 páginasElectiva II Tema III Fallasalfredojsm1812Aún no hay calificaciones
- MONOGRAFIAMETODOLOGIADocumento20 páginasMONOGRAFIAMETODOLOGIAalfredojsm1812Aún no hay calificaciones
- Anteproyecto Psi VDocumento3 páginasAnteproyecto Psi Valfredojsm1812Aún no hay calificaciones
- Examen QuimicaDocumento3 páginasExamen Quimicaalfredojsm1812Aún no hay calificaciones
- Anteproyecto Psi VDocumento3 páginasAnteproyecto Psi Valfredojsm1812Aún no hay calificaciones
- Etapas de Una Obra AlfredoDocumento8 páginasEtapas de Una Obra Alfredoalfredojsm1812Aún no hay calificaciones
- Asignacion #04 - Vibraciones Forzadas No AmortiguadasDocumento2 páginasAsignacion #04 - Vibraciones Forzadas No Amortiguadasalfredojsm1812Aún no hay calificaciones
- Folklore musical venezolanoDocumento14 páginasFolklore musical venezolanoalfredojsm1812Aún no hay calificaciones
- Planilla de Calculo de Eje Segun ASMEDocumento3 páginasPlanilla de Calculo de Eje Segun ASMEalfredojsm1812Aún no hay calificaciones
- Trabajo de La ConstruccionDocumento14 páginasTrabajo de La Construccionalfredojsm1812Aún no hay calificaciones
- Planilla de Calculo de Eje Segun ASMEDocumento3 páginasPlanilla de Calculo de Eje Segun ASMEalfredojsm1812Aún no hay calificaciones
- Presentacion Proyecto de Grado - A.salazar+S.blancoDocumento8 páginasPresentacion Proyecto de Grado - A.salazar+S.blancoalfredojsm1812Aún no hay calificaciones
- Guia de Estudio. Lazo Abierto y Cerrado.Documento9 páginasGuia de Estudio. Lazo Abierto y Cerrado.alfredojsm1812Aún no hay calificaciones
- Planilla de Calculo de Eje Segun ASMEDocumento3 páginasPlanilla de Calculo de Eje Segun ASMEalfredojsm1812Aún no hay calificaciones
- Segunda AsignacionDocumento4 páginasSegunda Asignacionalfredojsm1812Aún no hay calificaciones
- Vibracionesproblemas SolucionDocumento4 páginasVibracionesproblemas SolucionJimmy QmAún no hay calificaciones
- Esfuerzo SimpleDocumento14 páginasEsfuerzo Simplealfredojsm1812Aún no hay calificaciones
- Asignacion 3Documento21 páginasAsignacion 3alfredojsm1812Aún no hay calificaciones
- Asignacion 1Documento14 páginasAsignacion 1alfredojsm1812Aún no hay calificaciones
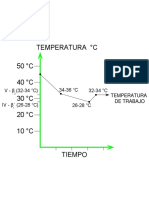
- Grafica Temperado ModelDocumento1 páginaGrafica Temperado Modelalfredojsm1812Aún no hay calificaciones
- Asignacion #03 - Vibraciones Libres AmortiguadasDocumento2 páginasAsignacion #03 - Vibraciones Libres Amortiguadasalfredojsm1812Aún no hay calificaciones
- Reductor tornillo S47 DT80N4/BMGDocumento1 páginaReductor tornillo S47 DT80N4/BMGalfredojsm1812Aún no hay calificaciones
- Calculo Espesor Tuberia Segun ASME B31 3..Documento12 páginasCalculo Espesor Tuberia Segun ASME B31 3..Hugo Ortega100% (1)
- Manual Mantenimiento Roper 3611Documento41 páginasManual Mantenimiento Roper 3611Pride Oil OffShoreAún no hay calificaciones
- Actividad Previa 6 Flores Escobedo GustavoDocumento3 páginasActividad Previa 6 Flores Escobedo Gustavogustavo floresAún no hay calificaciones
- Motores Corriente Continua-Grupo5Documento22 páginasMotores Corriente Continua-Grupo5Eduardo GavilanesAún no hay calificaciones
- Informe de Consulta MEMS y NEMSDocumento30 páginasInforme de Consulta MEMS y NEMSEdison Herrera NúñezAún no hay calificaciones
- Matematic3 Sem 19 - Dia 1 Graficos Estadisticos III Ccesa007Documento3 páginasMatematic3 Sem 19 - Dia 1 Graficos Estadisticos III Ccesa007Demetrio Ccesa RaymeAún no hay calificaciones
- Anexo 1 - Especificaciones Técnicas TopografiaDocumento6 páginasAnexo 1 - Especificaciones Técnicas TopografiaDiego Mauricio MoraAún no hay calificaciones
- Plan Preliminar de Trabajos Molino 9x13 Rev. CDocumento18 páginasPlan Preliminar de Trabajos Molino 9x13 Rev. CClever PárragaAún no hay calificaciones
- La oración gramaticalDocumento4 páginasLa oración gramaticalJuan Carlos BenitesAún no hay calificaciones
- 1308 07 01 DXDocumento9 páginas1308 07 01 DXPABLO CRUZ RAMIREZAún no hay calificaciones
- Opcion 1Documento222 páginasOpcion 1Sebastian GomezAún no hay calificaciones
- Tarea Verano Matematicas 4ºDocumento82 páginasTarea Verano Matematicas 4ºantonio_muñoz_30% (1)
- Poligonal Abierta - Estación TotalDocumento12 páginasPoligonal Abierta - Estación TotalLisbeth Villacorta Villanueva33% (3)
- Silaba Segunda Clase Lenguaje II NivelDocumento7 páginasSilaba Segunda Clase Lenguaje II NivelRicardo RodríguezAún no hay calificaciones
- Numeración y sistemas de numeración en la historiaDocumento6 páginasNumeración y sistemas de numeración en la historiacesarAún no hay calificaciones
- Sesiòn El AguaDocumento7 páginasSesiòn El AguaDancin ruth Ontaneda sarangoAún no hay calificaciones
- Estudio de tiempo estándar en Bodega AurreraDocumento17 páginasEstudio de tiempo estándar en Bodega AurreraMytzi AviilaAún no hay calificaciones
- Reacciones entre iones y separación de sustanciasDocumento18 páginasReacciones entre iones y separación de sustanciasJazmín AlvarezAún no hay calificaciones
- Ensayo tensión varilla aceroDocumento6 páginasEnsayo tensión varilla aceroGustavoAraujoAún no hay calificaciones
- T4-PLANIFICACION Y DISENO DE BALEOS DE POZOS-EstudiantesDocumento22 páginasT4-PLANIFICACION Y DISENO DE BALEOS DE POZOS-EstudiantesJonny PedrazaAún no hay calificaciones
- Ayudantia 4Documento2 páginasAyudantia 4W IngenieríaAún no hay calificaciones
- PRÁCTICA IX Aplicaciones Con El JFETDocumento4 páginasPRÁCTICA IX Aplicaciones Con El JFETLuis 66995Aún no hay calificaciones
- Guía de Reforzamiento: Funciones Electivo IV MedioDocumento3 páginasGuía de Reforzamiento: Funciones Electivo IV MedioAndrés EspinozaAún no hay calificaciones
- Características del conocimiento científicoDocumento4 páginasCaracterísticas del conocimiento científicoKatherine Cordero CabeloAún no hay calificaciones
- 5.2.1.4 Packet Tracer - Configuring SSH Instruction - ILMDocumento2 páginas5.2.1.4 Packet Tracer - Configuring SSH Instruction - ILMCarlos FernandezAún no hay calificaciones
- TC200 Analizador Automatico de BioquimicaDocumento2 páginasTC200 Analizador Automatico de BioquimicaMar Mar100% (2)
- Memoria Descriptiva LevantamientoDocumento2 páginasMemoria Descriptiva LevantamientoYajaira Benites TimanáAún no hay calificaciones
- CV Jose Luis RetuertoDocumento6 páginasCV Jose Luis RetuertoLuis MrnAún no hay calificaciones
- Introducción A La Tecnología CNCDocumento12 páginasIntroducción A La Tecnología CNCabrahamAún no hay calificaciones
- Hallar gradiente en terreno triangularDocumento7 páginasHallar gradiente en terreno triangularJesus Angel Estuco TiconaAún no hay calificaciones
- Trabajo Práctico Individual Iii - Investigacion de Operaciones IIDocumento9 páginasTrabajo Práctico Individual Iii - Investigacion de Operaciones IIYannynaAún no hay calificaciones
- El físico y el filósofo: Albert Einstein, Henri Bergson y el debate que cambió nuestra comprensión del tiempoDe EverandEl físico y el filósofo: Albert Einstein, Henri Bergson y el debate que cambió nuestra comprensión del tiempoAún no hay calificaciones
- La guía definitiva en Matemáticas para el Ingreso al BachilleratoDe EverandLa guía definitiva en Matemáticas para el Ingreso al BachilleratoCalificación: 4.5 de 5 estrellas4.5/5 (9)
- Neurocuántica: La nueva frontera de la neurocienciaDe EverandNeurocuántica: La nueva frontera de la neurocienciaCalificación: 5 de 5 estrellas5/5 (1)
- Problemas de física general en un año olímpicoDe EverandProblemas de física general en un año olímpicoCalificación: 5 de 5 estrellas5/5 (1)
- Los gatos sueñan con física cuántica y los perros con universos paralelos: Mecánica cuántica para todas las edadesDe EverandLos gatos sueñan con física cuántica y los perros con universos paralelos: Mecánica cuántica para todas las edadesCalificación: 4.5 de 5 estrellas4.5/5 (18)
- Manual técnico de refrigerantesDe EverandManual técnico de refrigerantesCalificación: 4 de 5 estrellas4/5 (4)
- Cuántica: Qué significa la teoría de la ciencia más extrañaDe EverandCuántica: Qué significa la teoría de la ciencia más extrañaCalificación: 1 de 5 estrellas1/5 (1)
- Física paso a paso: Más de 100 problemas resueltosDe EverandFísica paso a paso: Más de 100 problemas resueltosCalificación: 4 de 5 estrellas4/5 (12)
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoDe EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Física cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasDe EverandFísica cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasCalificación: 5 de 5 estrellas5/5 (4)
- Teoría electromagnética para estudiantes de ingeniería: Notas de claseDe EverandTeoría electromagnética para estudiantes de ingeniería: Notas de claseCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Electricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiDe EverandElectricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiCalificación: 3.5 de 5 estrellas3.5/5 (5)
- Razonamiento Lógico Matemático para la toma de decisionesDe EverandRazonamiento Lógico Matemático para la toma de decisionesCalificación: 4.5 de 5 estrellas4.5/5 (8)
- Álgebra Tomo Ii: Hake MateDe EverandÁlgebra Tomo Ii: Hake MateCalificación: 5 de 5 estrellas5/5 (2)
- Análisis estadístico de datos multivariadosDe EverandAnálisis estadístico de datos multivariadosCalificación: 5 de 5 estrellas5/5 (1)
- La física de Dios: La conexión entre la física cuántica, la conciencia, la Teoría M, el cielo, la neurociencia y la transcedenciaDe EverandLa física de Dios: La conexión entre la física cuántica, la conciencia, la Teoría M, el cielo, la neurociencia y la transcedenciaCalificación: 4.5 de 5 estrellas4.5/5 (18)
- NIKOLA TESLA: Mis Inventos - AutobiografiaDe EverandNIKOLA TESLA: Mis Inventos - AutobiografiaCalificación: 4.5 de 5 estrellas4.5/5 (2)
- La noción de medio en la teoría de las situaciones didácticas: Una herramienta para analizar decisiones en las clases de matemáticaDe EverandLa noción de medio en la teoría de las situaciones didácticas: Una herramienta para analizar decisiones en las clases de matemáticaCalificación: 5 de 5 estrellas5/5 (1)
- Introducción al análisis estadístico multivariado aplicado: Experiencia y casos en el Caribe colombianoDe EverandIntroducción al análisis estadístico multivariado aplicado: Experiencia y casos en el Caribe colombianoCalificación: 5 de 5 estrellas5/5 (2)