También podría gustarte
- Levantamiento Topografico de RutaDocumento31 páginasLevantamiento Topografico de RutaHansRamos0% (1)
- Ficha Seguridad EVER CLEANDocumento7 páginasFicha Seguridad EVER CLEANLuis Eduardo Cuevas PiñaAún no hay calificaciones
- Neúmatica Industrial PDFDocumento14 páginasNeúmatica Industrial PDFIvan M. ArroyoAún no hay calificaciones
- Fundacion BombaDocumento7 páginasFundacion BombaDavicho Cisterna AguayoAún no hay calificaciones
- Métodos de Sintonización de ControladoresDocumento8 páginasMétodos de Sintonización de Controladoreskevintk15Aún no hay calificaciones
- Sintonización de Controladores PIDDocumento13 páginasSintonización de Controladores PIDvadmanhAún no hay calificaciones
- Práctica SintonizacionDocumento6 páginasPráctica SintonizacionYayra AldapeAún no hay calificaciones
- Respuesta en El TiempoDocumento2 páginasRespuesta en El TiempoVictor J. OreAún no hay calificaciones
- Motores EspecialesDocumento10 páginasMotores EspecialesLuis Ángel Ramirez NavaAún no hay calificaciones
- Metodo de SintonizacionDocumento7 páginasMetodo de SintonizacionChuchitoAún no hay calificaciones
- Controlador PidDocumento15 páginasControlador Pid18037055480% (1)
- Compensadores en Atraso Usando El Método de RespuestaDocumento15 páginasCompensadores en Atraso Usando El Método de RespuestaLuis RCAún no hay calificaciones
- Criterio Cohen CoonDocumento10 páginasCriterio Cohen Coonantonio menoscalAún no hay calificaciones
- Método de Ziegler-NicholsDocumento4 páginasMétodo de Ziegler-NicholsDavid Iván Rosales Soto100% (1)
- Pid SintonizacionDocumento16 páginasPid SintonizacionGrecia Palomino SalazarAún no hay calificaciones
- Métodos de Ziegler y NicholsDocumento13 páginasMétodos de Ziegler y NicholsMontero Luis AlejandroAún no hay calificaciones
- Unidad Vi Criterio de Ziegler y NicholsDocumento11 páginasUnidad Vi Criterio de Ziegler y NicholsXavierTorresAún no hay calificaciones
- 12 Ajuste de Ganancias Del ControladorDocumento32 páginas12 Ajuste de Ganancias Del ControladorDaniel MartinezAún no hay calificaciones
- Codificadores y DecodificadoresDocumento16 páginasCodificadores y DecodificadoresFrancisco Rubilar CidAún no hay calificaciones
- Ceros de Fase No Minima y Solucion A Los ProblemasDocumento28 páginasCeros de Fase No Minima y Solucion A Los ProblemasCarlos A. RuizAún no hay calificaciones
- Sintonizacion Ziegler NicholsDocumento21 páginasSintonizacion Ziegler NicholsMichael Esteban Boggiano Castillo100% (1)
- Métodos de Sintonización en Lazo CerradoDocumento12 páginasMétodos de Sintonización en Lazo CerradoloFreDDAún no hay calificaciones
- LQR Control Applied To A Final Step of An Inverted Pendulum System (Stabilising)Documento5 páginasLQR Control Applied To A Final Step of An Inverted Pendulum System (Stabilising)Yovani ZuñigaAún no hay calificaciones
- Practica 4Documento4 páginasPractica 4Exovago Martinez50% (2)
- Grupo de Conexiones de Transformadores Trifásicos (Página 2)Documento12 páginasGrupo de Conexiones de Transformadores Trifásicos (Página 2)Gilberto Aleman SancheschulzAún no hay calificaciones
- Ziegler Nichols MatlabDocumento5 páginasZiegler Nichols MatlabFrank DazaAún no hay calificaciones
- Sintonizacion de Contr PidDocumento46 páginasSintonizacion de Contr PidAntonio Jesus LeonAún no hay calificaciones
- Lugar Geometrico de Las RaicesDocumento33 páginasLugar Geometrico de Las RaicesAquiles Moya67% (3)
- Mimo Vs SisoDocumento13 páginasMimo Vs SisorokajojiAún no hay calificaciones
- Criterio de Estabilidad en Sistemas LTI 2Documento13 páginasCriterio de Estabilidad en Sistemas LTI 2JeSyBarrigaAún no hay calificaciones
- Apuntes de Control PidDocumento134 páginasApuntes de Control PidcualquieraqueseaAún no hay calificaciones
- Paso 3 Control DigitalDocumento19 páginasPaso 3 Control DigitalJeison Acuña NadjarAún no hay calificaciones
- Controladores PIDDocumento131 páginasControladores PIDalejandro vasquez100% (1)
- SEP Laboratorio 1Documento67 páginasSEP Laboratorio 1miguelAún no hay calificaciones
- Control ProporcionalDocumento20 páginasControl Proporcionaljuan camiloAún no hay calificaciones
- MT221 ControlModerno PDFDocumento19 páginasMT221 ControlModerno PDFPerez AldairAún no hay calificaciones
- Solucionario Mecánica de Fluidos - Robert Mott, 6ta Edición-CopiarDocumento299 páginasSolucionario Mecánica de Fluidos - Robert Mott, 6ta Edición-CopiarAndy GuazhaAún no hay calificaciones
- Control ProporcionalDocumento16 páginasControl ProporcionalKaren S.Aún no hay calificaciones
- Método de Ziegler y NicholsDocumento8 páginasMétodo de Ziegler y NicholsAxel ToscaAún no hay calificaciones
- Energías Renovables en ColombiaDocumento26 páginasEnergías Renovables en ColombiaTatiana GutierrezAún no hay calificaciones
- PID, Filtros Wash-Out y Anti Wind-UpDocumento9 páginasPID, Filtros Wash-Out y Anti Wind-UpJose Jurado Hernandez0% (1)
- Diapositivas ExposiciónDocumento12 páginasDiapositivas ExposiciónIsrael Silvestre Aguilar QuispeAún no hay calificaciones
- Control de Taqnue 2Documento10 páginasControl de Taqnue 2Juan ChunaAún no hay calificaciones
- Introducción A Los Sistemas DiscretosDocumento12 páginasIntroducción A Los Sistemas DiscretosLuis Daniel Rodriguez VeraAún no hay calificaciones
- Valfaro 03 ADocumento17 páginasValfaro 03 Adagoberto piedrabuenaAún no hay calificaciones
- Teorema de Routh HurwitzDocumento5 páginasTeorema de Routh HurwitzcRAZYSAún no hay calificaciones
- Controlador AsignacPolos ObservadoresDocumento21 páginasControlador AsignacPolos ObservadoresAbrahan BaezaAún no hay calificaciones
- Control ProporcionalDocumento15 páginasControl ProporcionalJuan Carlos Lluncor MendozaAún no hay calificaciones
- Unidad 4 ControladoresDocumento18 páginasUnidad 4 ControladoresGlobos LugrimAún no hay calificaciones
- Reporte Levitador MagneticoDocumento20 páginasReporte Levitador MagneticoEmilio ReveloAún no hay calificaciones
- Modelado, Control y Simulación de Un Sistema Péndulo Invertido Sobre Base MóvilDocumento6 páginasModelado, Control y Simulación de Un Sistema Péndulo Invertido Sobre Base MóvilMiguel Sanchez BravoAún no hay calificaciones
- Tecnicas de Sintonizacion para ControladoresDocumento4 páginasTecnicas de Sintonizacion para Controladoresrenemelendez0% (1)
- Apuntes de Controles ElectricosDocumento79 páginasApuntes de Controles ElectricosJose Antonio Villalobos Garcia100% (2)
- Modelos Matemáticos de Sistemas FísicosDocumento15 páginasModelos Matemáticos de Sistemas Físicososwaldo2000Aún no hay calificaciones
- U4 Acciones Basicas de ControlDocumento147 páginasU4 Acciones Basicas de ControlJorge M. AkeAún no hay calificaciones
- Mosfet SDocumento16 páginasMosfet SYeorgette Sanchez TrejoAún no hay calificaciones
- Error en Estado Estacionario 1 PDFDocumento8 páginasError en Estado Estacionario 1 PDFJhOel Osores VAún no hay calificaciones
- Sistemas de Controlador ProporcionalDocumento5 páginasSistemas de Controlador ProporcionalRoberto Squertz LiveAún no hay calificaciones
- Interruptor de Estado SólidoDocumento4 páginasInterruptor de Estado SólidoMichellelelelele Galicia100% (1)
- Reglas Generales para Encontrar El Lugar Geométrico de LAS RAICESDocumento18 páginasReglas Generales para Encontrar El Lugar Geométrico de LAS RAICESVerónica IslasAún no hay calificaciones
- Compensacion Anti WindupDocumento4 páginasCompensacion Anti WindupMarco Manuel Marca CastilloAún no hay calificaciones
- Resumen 17 FebreroDocumento9 páginasResumen 17 FebreroDaniel GarciaAún no hay calificaciones
- Métodos de Sintonización de ControladoresDocumento12 páginasMétodos de Sintonización de ControladoresJosé Manuel CocolotlAún no hay calificaciones
- Metodos de SintonizacionDocumento11 páginasMetodos de SintonizacionJuanTaipeAún no hay calificaciones
- Informe de Laboratorio 4Documento17 páginasInforme de Laboratorio 4Carlos MazAún no hay calificaciones
- Estabilidad de Taludes y Empuje de TierrasDocumento86 páginasEstabilidad de Taludes y Empuje de TierrasMartin CasasAún no hay calificaciones
- Curva Concentracion vs. Densidad PDFDocumento8 páginasCurva Concentracion vs. Densidad PDFJuan GeraldoAún no hay calificaciones
- NMX C 416 Onncce Cap. 5 - GranulometríaDocumento11 páginasNMX C 416 Onncce Cap. 5 - GranulometríaC JmnzAún no hay calificaciones
- Cálculo Línea de ConducciónDocumento3 páginasCálculo Línea de ConducciónOscar MéridaAún no hay calificaciones
- Factores Bioticos y AbioticosDocumento2 páginasFactores Bioticos y AbioticosJosé AguilarAún no hay calificaciones
- Exposicion de CPTDocumento29 páginasExposicion de CPTivan saldañaAún no hay calificaciones
- Resumen Poundstone, William. (1995) - Dilemas. en "El Dilema Del Prisionero"Documento3 páginasResumen Poundstone, William. (1995) - Dilemas. en "El Dilema Del Prisionero"Ma Carmen garcía sotoAún no hay calificaciones
- ISS Vanguard - Cuaderno Bitacora ESPDocumento112 páginasISS Vanguard - Cuaderno Bitacora ESPJose Luis RMAún no hay calificaciones
- Tercero Básico - Ciencias (Física) - Segundo BloqueDocumento23 páginasTercero Básico - Ciencias (Física) - Segundo BloqueAshley PazAún no hay calificaciones
- Biografias de QuimicosDocumento18 páginasBiografias de QuimicosfreiderAún no hay calificaciones
- Máquinas Tuneladoras TBMDocumento16 páginasMáquinas Tuneladoras TBMrodrigoSC25Aún no hay calificaciones
- Reporte 3 BiomecánicaDocumento11 páginasReporte 3 BiomecánicaJOSE VALLEJOAún no hay calificaciones
- 1era EvaluacionDocumento6 páginas1era EvaluacionCarlos SalasAún no hay calificaciones
- Pruebas de MatemáticasDocumento19 páginasPruebas de Matemáticasovidio xilojAún no hay calificaciones
- Práctica 5 Lab. Física 201Documento4 páginasPráctica 5 Lab. Física 201Gisely A. Lantigua EstévezAún no hay calificaciones
- Operaciones en ZDocumento6 páginasOperaciones en ZKassandra DuertoAún no hay calificaciones
- 3a ACTIVIDADDocumento5 páginas3a ACTIVIDADAlondra BarreraAún no hay calificaciones
- 04 HomologiaDocumento26 páginas04 Homologiapsd057Aún no hay calificaciones
- Guia 1cDocumento3 páginasGuia 1cAbraham Alberto Chavez MurilloAún no hay calificaciones
- Tesis 05-11-2019Documento26 páginasTesis 05-11-2019dilverAún no hay calificaciones
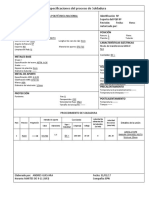
- Wps Del Proceso FcawDocumento2 páginasWps Del Proceso FcawAndress GuevaraAún no hay calificaciones
- Consulta Indice de KataDocumento6 páginasConsulta Indice de Kataedisson100% (2)
- Seminario Fisica Quimica 2008-IDocumento6 páginasSeminario Fisica Quimica 2008-IJu@n C@rlos88% (8)
- Medición de Aprendizaje Esperado 1.2Documento3 páginasMedición de Aprendizaje Esperado 1.2Mell CarrazanaAún no hay calificaciones