También podría gustarte
- PDF Manual de Openbullet - CompressghjghjDocumento19 páginasPDF Manual de Openbullet - CompressghjghjJuly JimenezAún no hay calificaciones
- Simulación de circuitos electrónicos con OrCAD® PSpice®De EverandSimulación de circuitos electrónicos con OrCAD® PSpice®Aún no hay calificaciones
- Aprender Arduino, prototipado y programación avanzada con 100 ejerciciosDe EverandAprender Arduino, prototipado y programación avanzada con 100 ejerciciosCalificación: 5 de 5 estrellas5/5 (5)
- Solucionario de RIGIDEZ VIGASDocumento102 páginasSolucionario de RIGIDEZ VIGASVictor Daza CecilioAún no hay calificaciones
- 2016 Libro MecatronicayRoboticadeServicio PDFDocumento226 páginas2016 Libro MecatronicayRoboticadeServicio PDFRicardo Hernandez100% (1)
- NTC 819Documento9 páginasNTC 819Fabio Alexander Torres Amaya100% (1)
- Oscilogramas Sensores de AdmisionDocumento24 páginasOscilogramas Sensores de AdmisionJosecantero73100% (3)
- Medidor de Consumo Electrico DigitalDocumento206 páginasMedidor de Consumo Electrico DigitalJuan LitardoAún no hay calificaciones
- Funcionamiento y Operacion Del Osciloscopio OTCDocumento7 páginasFuncionamiento y Operacion Del Osciloscopio OTCdamian freireAún no hay calificaciones
- FortinetDocumento12 páginasFortinetSebastian Yohan Alvarez ObandoAún no hay calificaciones
- Ubicacion de Unidades de EmergenciaDocumento12 páginasUbicacion de Unidades de EmergenciaZaid GallegosAún no hay calificaciones
- Trabajo de Curso - Acoplamiento de Transformadores 14-09-22Documento11 páginasTrabajo de Curso - Acoplamiento de Transformadores 14-09-22Moises AtencioAún no hay calificaciones
- Información Clientes EN81-20 ESDocumento2 páginasInformación Clientes EN81-20 ESstephenk19100% (2)
- Practicas Neumatica Hidraulica PDFDocumento63 páginasPracticas Neumatica Hidraulica PDFIsaac OrtegaAún no hay calificaciones
- Ariel Homero Chavez Aguilar Elm PDFDocumento13 páginasAriel Homero Chavez Aguilar Elm PDFAriel ChavezAún no hay calificaciones
- Ariel Homero Chavez Aguilar Elm PDFDocumento11 páginasAriel Homero Chavez Aguilar Elm PDFAriel ChavezAún no hay calificaciones
- Sistema de Inyeccion 5Documento19 páginasSistema de Inyeccion 5Juanfrancisco Rojas OlivaresAún no hay calificaciones
- CrocodileDocumento5 páginasCrocodileJuank SimbañaAún no hay calificaciones
- Electronica Digital Cuaderno de Informes n2Documento7 páginasElectronica Digital Cuaderno de Informes n2Lewis Nathanael Gael NAún no hay calificaciones
- Elect Ind-008-Mlmh-2022Documento5 páginasElect Ind-008-Mlmh-2022Kalid SaladoAún no hay calificaciones
- Sensor de Combinación pH/Potencial Redox: Modelo 396PDocumento40 páginasSensor de Combinación pH/Potencial Redox: Modelo 396PJulieta RomeroAún no hay calificaciones
- Inyeccion A Gasolina 3Documento19 páginasInyeccion A Gasolina 3Juanfrancisco Rojas OlivaresAún no hay calificaciones
- Elect Ind-004-Mlmh-2024Documento6 páginasElect Ind-004-Mlmh-2024Rosales Ramirez Arturo UlisesAún no hay calificaciones
- Informe 1 Uso de Osciloscopio - Byron ToapantaDocumento15 páginasInforme 1 Uso de Osciloscopio - Byron ToapantaReneReinaldo100% (1)
- Elect Ind-004-Mlmh-2019Documento6 páginasElect Ind-004-Mlmh-2019Felipe EnriquezAún no hay calificaciones
- Elect Ind-009-Mlmh-2016Documento6 páginasElect Ind-009-Mlmh-2016Felipe EnriquezAún no hay calificaciones
- Informe ContadorDocumento12 páginasInforme ContadorrosaAún no hay calificaciones
- Guia 02 Taladro SemiautomatizadoDocumento4 páginasGuia 02 Taladro SemiautomatizadoDavid ChisaguanoAún no hay calificaciones
- Práctica 5 GuionDocumento5 páginasPráctica 5 GuionJalila KasmiAún no hay calificaciones
- Guia de Aprendizaje #3 ELECTRONEUMATICADocumento14 páginasGuia de Aprendizaje #3 ELECTRONEUMATICAJOSE CONTRERAS MAESTREAún no hay calificaciones
- Laboratorio #4 2 - 2022Documento5 páginasLaboratorio #4 2 - 2022Leonel MamaniAún no hay calificaciones
- Hidraulica - Neumatica - Guia de Practicas 2Documento13 páginasHidraulica - Neumatica - Guia de Practicas 2apolo_leninAún no hay calificaciones
- ECCU - ECCU-210 - FORMATOALUMNOTRABAJOFINAL-SALCEDO QUISPE SAMUEL - FGHJFJDocumento9 páginasECCU - ECCU-210 - FORMATOALUMNOTRABAJOFINAL-SALCEDO QUISPE SAMUEL - FGHJFJSamuel SalcedoAún no hay calificaciones
- Ariel Homero Chavez Aguilar - Laboratorio 3Documento21 páginasAriel Homero Chavez Aguilar - Laboratorio 3Ariel ChavezAún no hay calificaciones
- LABORATORIO. Programar TemporizadoresDocumento7 páginasLABORATORIO. Programar Temporizadoresivan gomezAún no hay calificaciones
- Tercera Entrega-Jhoelo Perez Ramos-Electron. AplicadaDocumento9 páginasTercera Entrega-Jhoelo Perez Ramos-Electron. AplicadaJhoelo Perez RamosAún no hay calificaciones
- Guía Autotronica SensoresDocumento4 páginasGuía Autotronica SensoresDavid Ramirez NavarreteAún no hay calificaciones
- Práctica 7. Accionamientos de Velocidad Variable para Máquinas Asìncronas Control Escalar y Arrancador SuaveDocumento3 páginasPráctica 7. Accionamientos de Velocidad Variable para Máquinas Asìncronas Control Escalar y Arrancador SuaveSsebass PozzoAún no hay calificaciones
- ELECT IND-010-MLMH-2020contadoresDocumento6 páginasELECT IND-010-MLMH-2020contadoresKalid SaladoAún no hay calificaciones
- Act3. Práctica de LaboratorioDocumento21 páginasAct3. Práctica de LaboratorioAdrianAún no hay calificaciones
- Informe Practica 4 Grupo3Documento6 páginasInforme Practica 4 Grupo3Paola VillalbaAún no hay calificaciones
- Guía Autotronica SensoresDocumento4 páginasGuía Autotronica SensoresDavid Ramirez Navarrete100% (1)
- LAB-S03-2023 - Instrumentos Convertidores I-PDocumento14 páginasLAB-S03-2023 - Instrumentos Convertidores I-PJunior LimaAún no hay calificaciones
- Entregable 2 Automatismo IndustrialDocumento15 páginasEntregable 2 Automatismo IndustrialLeyder Yrigoin YdrogoAún no hay calificaciones
- Informe Semaforo1Documento11 páginasInforme Semaforo1CHRISTIAN GUAYPATINAún no hay calificaciones
- Final Correcion 4Documento16 páginasFinal Correcion 4Angel Jesús ChicaizaAún no hay calificaciones
- Lab-No 09 El Condensador Con Voltaje DCDocumento4 páginasLab-No 09 El Condensador Con Voltaje DCPUMA CONDOR DANIEL STHYPAún no hay calificaciones
- Cuaderno de Informes - IFP 03Documento21 páginasCuaderno de Informes - IFP 03Miguel Angel VillaverdeAún no hay calificaciones
- FinalDocumento4 páginasFinalWalter Rivera LozadaAún no hay calificaciones
- Guia Practica 7 2023Documento5 páginasGuia Practica 7 2023namae jpAún no hay calificaciones
- P10 Estudio de Un Variador de Velocidad para Un Motor ACDocumento8 páginasP10 Estudio de Un Variador de Velocidad para Un Motor ACAndersonAún no hay calificaciones
- Lab 05 - Temporizadores y Generadores de ClockDocumento7 páginasLab 05 - Temporizadores y Generadores de ClockHugo Luna FloresAún no hay calificaciones
- Practica 7Documento5 páginasPractica 7Christian DavidAún no hay calificaciones
- Guia No 4 Amp OpDocumento4 páginasGuia No 4 Amp OpElver GarciaAún no hay calificaciones
- Práctica 4 Pistones Doble Efecto Con TimerDocumento5 páginasPráctica 4 Pistones Doble Efecto Con TimerEdgar Lopez AguirreAún no hay calificaciones
- Hoja Guia Fundamentos de Circuitos - Practica 3Documento4 páginasHoja Guia Fundamentos de Circuitos - Practica 3bryanAún no hay calificaciones
- Accionamientos Laboratorio 4 Secuencias Automaticas PDFDocumento15 páginasAccionamientos Laboratorio 4 Secuencias Automaticas PDFCristian Gabriel Ascencio AcevedoAún no hay calificaciones
- Cuaderno de Informe - Semana Nº1 ALEXDocumento15 páginasCuaderno de Informe - Semana Nº1 ALEXOskava KenjutsuAún no hay calificaciones
- Guia #3 Sensor de Posición de La MariposaDocumento10 páginasGuia #3 Sensor de Posición de La MariposaAlexisAún no hay calificaciones
- Lab3 elkaIIDocumento4 páginasLab3 elkaIISergio RomeroAún no hay calificaciones
- Laboratorio 1 - Circuito ANDDocumento18 páginasLaboratorio 1 - Circuito ANDCarlaAún no hay calificaciones
- 2da-Entrega-FORMATO ALUMNO-Electron. AplicadaDocumento8 páginas2da-Entrega-FORMATO ALUMNO-Electron. AplicadaJhoelo Perez RamosAún no hay calificaciones
- Trabajo AutomatismoDocumento11 páginasTrabajo AutomatismoJean QuispeAún no hay calificaciones
- PDF Lab05 y Lab06 Temporizadores y Contadores c5 4a - CompressDocumento10 páginasPDF Lab05 y Lab06 Temporizadores y Contadores c5 4a - CompressElizabeth Q.Aún no hay calificaciones
- Arranque, Paro e Inversion de Giro de Motor de CC o CD Con Compuertas LogicasDocumento7 páginasArranque, Paro e Inversion de Giro de Motor de CC o CD Con Compuertas LogicasOmar Edwin Estrada SantanaAún no hay calificaciones
- Laboratorio #7Documento13 páginasLaboratorio #7LUIS CARLOS CASTILLO CUROAún no hay calificaciones
- Guia No 6 Amp OpDocumento4 páginasGuia No 6 Amp OpLeonardo GarridoAún no hay calificaciones
- 001Documento33 páginas001Orlando Flores50% (2)
- Leyes de ExponnetesDocumento2 páginasLeyes de ExponnetesAriel ChavezAún no hay calificaciones
- Chavez Aguilar Ariel Homero - Practica N4Documento7 páginasChavez Aguilar Ariel Homero - Practica N4Ariel ChavezAún no hay calificaciones
- Trigonometria... IdentidadesDocumento2 páginasTrigonometria... IdentidadesAriel ChavezAún no hay calificaciones
- PROGRESIONESDocumento2 páginasPROGRESIONESAriel ChavezAún no hay calificaciones
- Chavez Aguilar Ariel Homero - Practica N5Documento9 páginasChavez Aguilar Ariel Homero - Practica N5Ariel ChavezAún no hay calificaciones
- P1 AbrasivosDocumento46 páginasP1 AbrasivosAriel ChavezAún no hay calificaciones
- Progresiones 2Documento2 páginasProgresiones 2Ariel ChavezAún no hay calificaciones
- Logaritmos y Sistemas LogaritmicosDocumento1 páginaLogaritmos y Sistemas LogaritmicosAriel ChavezAún no hay calificaciones
- Ariel Homero Chavez Aguilar Elm - 1Documento5 páginasAriel Homero Chavez Aguilar Elm - 1Ariel ChavezAún no hay calificaciones
- Ariel Homero Chavez Aguilar Elm - 4Documento3 páginasAriel Homero Chavez Aguilar Elm - 4Ariel ChavezAún no hay calificaciones
- Ariel Homero Chavez Aguilar Elm - 1Documento3 páginasAriel Homero Chavez Aguilar Elm - 1Ariel ChavezAún no hay calificaciones
- Ariel Homero Chavez Aguilar Elm - 3 - 1Documento3 páginasAriel Homero Chavez Aguilar Elm - 3 - 1Ariel ChavezAún no hay calificaciones
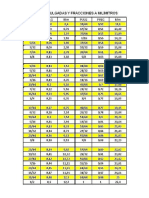
- Pulgadas - MilimetrosDocumento1 páginaPulgadas - MilimetrosAriel ChavezAún no hay calificaciones
- Ariel Homero Chavez Aguilar Elm - 1Documento3 páginasAriel Homero Chavez Aguilar Elm - 1Ariel ChavezAún no hay calificaciones
- Practica N1Documento6 páginasPractica N1Ariel ChavezAún no hay calificaciones
- Ariel Homero Chavez Aguilar - Laboratorio 3Documento21 páginasAriel Homero Chavez Aguilar - Laboratorio 3Ariel ChavezAún no hay calificaciones
- Practica 3Documento2 páginasPractica 3Ariel ChavezAún no hay calificaciones
- Ariel Homero Chavez Aguilar Elm - 1Documento3 páginasAriel Homero Chavez Aguilar Elm - 1Ariel ChavezAún no hay calificaciones
- Ariel Homero Chavez Aguilar Elm - 1Documento3 páginasAriel Homero Chavez Aguilar Elm - 1Ariel ChavezAún no hay calificaciones
- Practica N°4 MEC223Documento1 páginaPractica N°4 MEC223Ariel ChavezAún no hay calificaciones
- Ariel Homero Chavez Aguilar - Laboratorio 2Documento19 páginasAriel Homero Chavez Aguilar - Laboratorio 2Ariel ChavezAún no hay calificaciones
- Trabajo 3Documento3 páginasTrabajo 3Ariel ChavezAún no hay calificaciones
- Trabajo 2Documento5 páginasTrabajo 2Ariel ChavezAún no hay calificaciones
- Ariel Homero Chavez Aguilar - Laboratorio 1Documento13 páginasAriel Homero Chavez Aguilar - Laboratorio 1Ariel ChavezAún no hay calificaciones
- Laboratoratorio#15 Lmec432Documento6 páginasLaboratoratorio#15 Lmec432Ariel ChavezAún no hay calificaciones
- Ariel Homero Chavez Aguilar - Laboratorio 3Documento21 páginasAriel Homero Chavez Aguilar - Laboratorio 3Ariel ChavezAún no hay calificaciones
- Ariel Homero Chavez Aguilar - Laboratorio 2Documento19 páginasAriel Homero Chavez Aguilar - Laboratorio 2Ariel ChavezAún no hay calificaciones
- ARIEL HOMERO CHAVEZ AGUILAR ELMs PDFDocumento6 páginasARIEL HOMERO CHAVEZ AGUILAR ELMs PDFAriel ChavezAún no hay calificaciones
- Ariel Homero Chavez Aguilar Elm PDFDocumento9 páginasAriel Homero Chavez Aguilar Elm PDFAriel ChavezAún no hay calificaciones
- QRG - Glencore - Planificacion IiDocumento81 páginasQRG - Glencore - Planificacion IiddonosoAún no hay calificaciones
- Reparacion de Tablas PDFDocumento22 páginasReparacion de Tablas PDFWilliam Fernando Arenas AlvarezAún no hay calificaciones
- Diferencia Las Clases de Teclado Que ExistenDocumento4 páginasDiferencia Las Clases de Teclado Que ExistenParroquia San Antonio De Padua FloridaAún no hay calificaciones
- Manual MecánicoDocumento18 páginasManual Mecánicojuan pablo paez coloradoAún no hay calificaciones
- Román Cárdenas Darwin VicenteDocumento100 páginasRomán Cárdenas Darwin VicenteJohn SantamariaAún no hay calificaciones
- Las Telecomunicaciones en El Trabajo de Las y Los Funcionarios de La Seguridad Ciudadana y Sistema PenitenciarioDocumento4 páginasLas Telecomunicaciones en El Trabajo de Las y Los Funcionarios de La Seguridad Ciudadana y Sistema PenitenciarioHendry Rodríguez67% (3)
- User 2 20210211190105Documento6 páginasUser 2 20210211190105ISELA NOEMI SANCHEZ MONTESAún no hay calificaciones
- Magnani - La Jaula Del Confort - Tecnología y SociedadDocumento11 páginasMagnani - La Jaula Del Confort - Tecnología y SociedadJoaquin PaulAún no hay calificaciones
- Mip15b31 C2 3310 55 PR 205Documento20 páginasMip15b31 C2 3310 55 PR 205victor ccansaya linaresAún no hay calificaciones
- Tema 41 - Sistemas de Detección de IntrusosDocumento9 páginasTema 41 - Sistemas de Detección de IntrusosRaul Reyes NavaAún no hay calificaciones
- Iii. Técnicas Algorítmicas para La Solución de ProblemasDocumento5 páginasIii. Técnicas Algorítmicas para La Solución de ProblemasEdwin SalcedoAún no hay calificaciones
- Reco Folleto Rv2Documento2 páginasReco Folleto Rv2kjkljkljlkjljlkAún no hay calificaciones
- PLM SostenibleDocumento7 páginasPLM SostenibleCristian Felipe AcostaAún no hay calificaciones
- Tarjeta de Adquisición de DatosDocumento9 páginasTarjeta de Adquisición de DatosnalleyAún no hay calificaciones
- MONTACARGASDocumento7 páginasMONTACARGASrosario tancaylloAún no hay calificaciones
- Memoria Descriptica LLTTDocumento20 páginasMemoria Descriptica LLTTsergioAún no hay calificaciones
- Modern Professional Resume PDFDocumento2 páginasModern Professional Resume PDFZolamente TefaAún no hay calificaciones
- Caso de Aplicacion Seis SigmaDocumento7 páginasCaso de Aplicacion Seis SigmajogaviarAún no hay calificaciones
- Guia Ingenieria en Metal MecanicaDocumento9 páginasGuia Ingenieria en Metal MecanicaUsagi TutuAún no hay calificaciones
- Vsphere Esxi Vcenter Server 602 Host Management GuideDocumento220 páginasVsphere Esxi Vcenter Server 602 Host Management GuideDavid BarreraAún no hay calificaciones
- Presmod User Guide-17-24Documento8 páginasPresmod User Guide-17-24Gonzalo Diaz FerrerAún no hay calificaciones
- Informe de SMSDocumento4 páginasInforme de SMSAndre Allauca Necochea50% (2)