También podría gustarte
- Puesta en marcha de sistemas de automatización industrial. ELEM0311De EverandPuesta en marcha de sistemas de automatización industrial. ELEM0311Calificación: 3 de 5 estrellas3/5 (1)
- Mis Proyectos Con ArduinoDocumento138 páginasMis Proyectos Con ArduinoAndrésMcGrathSánchez100% (5)
- El Gran Libro de IfaDocumento273 páginasEl Gran Libro de IfaHenry Lara92% (12)
- 06 Librito de Actividades para Ninos JosueDocumento4 páginas06 Librito de Actividades para Ninos JosueIsabel86% (7)
- Proyecto Carro BluetoothDocumento24 páginasProyecto Carro BluetoothLeonardo HernandezAún no hay calificaciones
- Paso 6-Proyecto Final-Grupo 309696 - 15-Luis Andres RamosDocumento59 páginasPaso 6-Proyecto Final-Grupo 309696 - 15-Luis Andres Ramosluis andres ramosAún no hay calificaciones
- Surgimiento Teologia Cristiana SeparacionDocumento23 páginasSurgimiento Teologia Cristiana SeparacionRodríguez CalderínAún no hay calificaciones
- Telemetria Fase 3 Componente PracticoDocumento15 páginasTelemetria Fase 3 Componente Practicoleosignare100% (1)
- Tensión SexualDocumento14 páginasTensión SexualRuben Arana100% (1)
- Practica Sensor de TemperaturaDocumento11 páginasPractica Sensor de TemperaturaDanny Caisachana Ortiz50% (2)
- Cuadernillo Sistemas ProgramablesDocumento66 páginasCuadernillo Sistemas ProgramablesMaxwell Graham BellAún no hay calificaciones
- Cuaderno de Informes 4 MicroDocumento15 páginasCuaderno de Informes 4 MicroDashi Lermo chuquillanquiAún no hay calificaciones
- Programaciones BascomDocumento77 páginasProgramaciones BascomFercHo MDsAún no hay calificaciones
- Pract Lab Ardu v2Documento77 páginasPract Lab Ardu v2Juan GomezAún no hay calificaciones
- Pract3 Arduino UnoDocumento5 páginasPract3 Arduino UnoAlejandro OsorioAún no hay calificaciones
- MemoriaDocumento30 páginasMemoriaIrene Merino FernandezAún no hay calificaciones
- Informe Final Del Laboratorio 5Documento6 páginasInforme Final Del Laboratorio 5Ademir IldefonsoAún no hay calificaciones
- CASA DOMOTICA Con App InventorDocumento7 páginasCASA DOMOTICA Con App InventorjunreymonAún no hay calificaciones
- Practica Dispositivo IoTDocumento8 páginasPractica Dispositivo IoTAngel Sanchez ZarcoAún no hay calificaciones
- Wa0032.Documento11 páginasWa0032.José PardoAún no hay calificaciones
- Proyecto FinalDocumento14 páginasProyecto FinalAlan David Rojo HernandezAún no hay calificaciones
- Robot Evita Obstaculos.Documento12 páginasRobot Evita Obstaculos.Berenice SunemAún no hay calificaciones
- Cuaderno de Informes 3 MicroDocumento14 páginasCuaderno de Informes 3 MicroDashi Lermo chuquillanquiAún no hay calificaciones
- Tri-Carevita ObstaculosDocumento87 páginasTri-Carevita ObstaculosHector VallejosAún no hay calificaciones
- Lab 2 RodrigoMDocumento20 páginasLab 2 RodrigoMCristian Gunar Romano CandiAún no hay calificaciones
- Robot Evita Obstaculos NOVIEMBREDocumento13 páginasRobot Evita Obstaculos NOVIEMBREBerenice SunemAún no hay calificaciones
- MICROCONTROLADOR - Clave de SeguridadDocumento16 páginasMICROCONTROLADOR - Clave de SeguridadAlexander Izcali Celaya LuisAún no hay calificaciones
- Informe - Carro Arduino - FinalDocumento22 páginasInforme - Carro Arduino - FinalDahyana Uribe Cortes50% (2)
- Semaforo Digital - JPRRDocumento18 páginasSemaforo Digital - JPRRjeanAún no hay calificaciones
- Practica Nro 8Documento7 páginasPractica Nro 8Ronald ContrerasAún no hay calificaciones
- Informe Encoder Alcoser AldanaDocumento6 páginasInforme Encoder Alcoser AldanaEfra AlcoserAún no hay calificaciones
- P1 OriolRuizVilarroya MimounOuhnaDocumento15 páginasP1 OriolRuizVilarroya MimounOuhnaCristian DazaAún no hay calificaciones
- Arduino UnoDocumento13 páginasArduino UnoGAMERMGAún no hay calificaciones
- Informe Robot BalancinDocumento21 páginasInforme Robot BalancinMarco Andres Cisneros VargasAún no hay calificaciones
- Proyecto Grado Memoria PFC Tomas AlbaceteDocumento113 páginasProyecto Grado Memoria PFC Tomas AlbaceteGloria Lizarazo de FlorezAún no hay calificaciones
- Zeña CasianoDocumento20 páginasZeña CasianojozeAún no hay calificaciones
- Reporte Mi ArduinoDocumento15 páginasReporte Mi Arduino1615375yeniferyazmin puentedeleonAún no hay calificaciones
- Practicas U2Documento53 páginasPracticas U2leidi herreraAún no hay calificaciones
- Proyecto Integrador - ElectrónicaDocumento18 páginasProyecto Integrador - Electrónicajoel soledispaAún no hay calificaciones
- Práctica 1-Monitoreo y Ajuste de Parámetros Con Arduino y Matlab SimulinkDocumento12 páginasPráctica 1-Monitoreo y Ajuste de Parámetros Con Arduino y Matlab SimulinkIsrael GutiérrezAún no hay calificaciones
- Implementación de Un Sensor de Reversa Con Alarma Auditiva y Visual en ARDUINODocumento12 páginasImplementación de Un Sensor de Reversa Con Alarma Auditiva y Visual en ARDUINOgustavoAún no hay calificaciones
- Control On/off Con Banda MuertaDocumento12 páginasControl On/off Con Banda MuertaJorge VargasAún no hay calificaciones
- Informe Laboratorio 1Documento15 páginasInforme Laboratorio 1john bernalAún no hay calificaciones
- Emit Emit-421 FormatoalumnotrabajofinalDocumento12 páginasEmit Emit-421 FormatoalumnotrabajofinalPiero PinedAún no hay calificaciones
- Lab 07 Conversión ADCDocumento10 páginasLab 07 Conversión ADCHoshenson Rodrigo Diaz MamaniAún no hay calificaciones
- Manual Practica 1 Blink LedDocumento9 páginasManual Practica 1 Blink LedEsteban GuerreroAún no hay calificaciones
- Informe Arduino Salinas JoaquinDocumento10 páginasInforme Arduino Salinas JoaquinJoaquin SalinasAún no hay calificaciones
- Universidad Nacional de San Agust in Escuela Profesional de Ingenier Ia Electr Onica Telem Atica IiDocumento12 páginasUniversidad Nacional de San Agust in Escuela Profesional de Ingenier Ia Electr Onica Telem Atica IiDaniloAún no hay calificaciones
- CarBot Proyecto FinalDocumento12 páginasCarBot Proyecto FinalYefrin PachecoAún no hay calificaciones
- Practica No 5Documento20 páginasPractica No 5domingoAún no hay calificaciones
- Laboratorio 1Documento9 páginasLaboratorio 1ADEMIR JUNIOR TORRES YUPANQUIAún no hay calificaciones
- Practica 1 (Castellanos Quiroga - Perez Linares)Documento9 páginasPractica 1 (Castellanos Quiroga - Perez Linares)Diegao PerezAún no hay calificaciones
- Practina N3 - Higrometro - 1632369Documento9 páginasPractina N3 - Higrometro - 1632369brayanAún no hay calificaciones
- Optoelectronica ReporteDocumento15 páginasOptoelectronica ReporteEdgar B. GonzálezAún no hay calificaciones
- Arbol ArduDocumento15 páginasArbol ArduGuichoesparza11Aún no hay calificaciones
- Sistemas DigitalesDocumento22 páginasSistemas DigitalesYosselyn CastroAún no hay calificaciones
- Informe OsciloscopioDocumento7 páginasInforme OsciloscopioMarcelo RamirezAún no hay calificaciones
- Integradora 2Documento21 páginasIntegradora 2Jesus Ivan Ramirez RosalesAún no hay calificaciones
- Mariana LPDocumento7 páginasMariana LPMarianaAún no hay calificaciones
- Practica 13 Report eDocumento13 páginasPractica 13 Report eAlbert GeorgeAún no hay calificaciones
- MicrosDocumento5 páginasMicrosalfredo lezamaAún no hay calificaciones
- Generador Lector de Señales Pantalla LCD en Lenguaje CDocumento5 páginasGenerador Lector de Señales Pantalla LCD en Lenguaje CCamilo NasAún no hay calificaciones
- Micro Control AdoresDocumento9 páginasMicro Control AdoresMiguelAngél Callási YucraAún no hay calificaciones
- Chavez Aguilar Ariel Homero - Practica N5Documento9 páginasChavez Aguilar Ariel Homero - Practica N5Ariel ChavezAún no hay calificaciones
- Chavez Aguilar Ariel Homero - Practica N4Documento7 páginasChavez Aguilar Ariel Homero - Practica N4Ariel ChavezAún no hay calificaciones
- PROGRESIONESDocumento2 páginasPROGRESIONESAriel ChavezAún no hay calificaciones
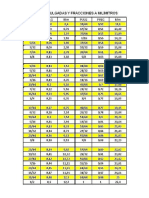
- Pulgadas - MilimetrosDocumento1 páginaPulgadas - MilimetrosAriel ChavezAún no hay calificaciones
- P1 AbrasivosDocumento46 páginasP1 AbrasivosAriel ChavezAún no hay calificaciones
- Practica 3Documento2 páginasPractica 3Ariel ChavezAún no hay calificaciones
- Ariel Homero Chavez Aguilar Elm - 4Documento3 páginasAriel Homero Chavez Aguilar Elm - 4Ariel ChavezAún no hay calificaciones
- Ariel Homero Chavez Aguilar - Laboratorio 3Documento21 páginasAriel Homero Chavez Aguilar - Laboratorio 3Ariel ChavezAún no hay calificaciones
- Practica N1Documento6 páginasPractica N1Ariel ChavezAún no hay calificaciones
- Ariel Homero Chavez Aguilar Elm - 1Documento3 páginasAriel Homero Chavez Aguilar Elm - 1Ariel ChavezAún no hay calificaciones
- Practica N°4 MEC223Documento1 páginaPractica N°4 MEC223Ariel ChavezAún no hay calificaciones
- Ariel Homero Chavez Aguilar - Laboratorio 2Documento19 páginasAriel Homero Chavez Aguilar - Laboratorio 2Ariel ChavezAún no hay calificaciones
- Laboratorio 4 Simulacion de Un Circuito Electroneumatico Utilizando GrafcetDocumento13 páginasLaboratorio 4 Simulacion de Un Circuito Electroneumatico Utilizando GrafcetAriel ChavezAún no hay calificaciones
- Ariel Homero Chavez Aguilar Elm PDFDocumento9 páginasAriel Homero Chavez Aguilar Elm PDFAriel ChavezAún no hay calificaciones
- Ariel Homero Chavez Aguilar - Laboratorio 1Documento13 páginasAriel Homero Chavez Aguilar - Laboratorio 1Ariel ChavezAún no hay calificaciones
- Ariel Homero Chavez Aguilar - Laboratorio 2Documento19 páginasAriel Homero Chavez Aguilar - Laboratorio 2Ariel ChavezAún no hay calificaciones
- Laboratoratorio#15 Lmec432Documento6 páginasLaboratoratorio#15 Lmec432Ariel ChavezAún no hay calificaciones
- Ariel Homero Chavez Aguilar Elm PDFDocumento11 páginasAriel Homero Chavez Aguilar Elm PDFAriel ChavezAún no hay calificaciones
- Ariel Homero Chavez Aguilar Elm PDFDocumento13 páginasAriel Homero Chavez Aguilar Elm PDFAriel ChavezAún no hay calificaciones
- Laboratorio#1 Lmec 432Documento8 páginasLaboratorio#1 Lmec 432Ariel ChavezAún no hay calificaciones
- CUESTIONARIO No 1 NEUMATICADocumento3 páginasCUESTIONARIO No 1 NEUMATICAAriel ChavezAún no hay calificaciones
- Eslabones de La Costruccion Chanca en AndahuayasDocumento41 páginasEslabones de La Costruccion Chanca en AndahuayasRoy BassAún no hay calificaciones
- ¿De Qué Depende La Expresión de Emociones en El Canto - Revisión de Estudios Científicos - CantoConCienciaDocumento5 páginas¿De Qué Depende La Expresión de Emociones en El Canto - Revisión de Estudios Científicos - CantoConCienciaMichAún no hay calificaciones
- Estructuras Narrativas No ObjetualesDocumento7 páginasEstructuras Narrativas No ObjetualesblonkiAún no hay calificaciones
- Escatología PaulinaDocumento5 páginasEscatología PaulinaAndrés Felipe Sánchez MorenoAún no hay calificaciones
- Mejoras en La Versión SisGalenPlusDocumento21 páginasMejoras en La Versión SisGalenPlusEdwin RojasAún no hay calificaciones
- Guia El Cuento 1Documento3 páginasGuia El Cuento 1rosario tobAún no hay calificaciones
- MensajeDocumento2 páginasMensajeNathaly HerediaAún no hay calificaciones
- Biografia de Alan Turing y John Rogers SearleDocumento4 páginasBiografia de Alan Turing y John Rogers SearleJackson SEAún no hay calificaciones
- 1.lunes 5.07.21 ComunicaciónDocumento4 páginas1.lunes 5.07.21 ComunicaciónMathairAún no hay calificaciones
- Blazor & Maui: Juan Carlos Aga 2023, Semestre 1Documento316 páginasBlazor & Maui: Juan Carlos Aga 2023, Semestre 1Monte Sol100% (1)
- Comunicacion HumanaDocumento3 páginasComunicacion HumanaStefi Ortiz LopezAún no hay calificaciones
- Felix R1 U1Documento3 páginasFelix R1 U1Movil FeAún no hay calificaciones
- Metodos de DemostracionDocumento40 páginasMetodos de DemostracionWalter Torres MontesAún no hay calificaciones
- Lesson 1.13 My Daily Routine 1Documento6 páginasLesson 1.13 My Daily Routine 1Víctor ManjarresAún no hay calificaciones
- Act 2Documento1 páginaAct 2Sarai BahenaAún no hay calificaciones
- Teorema de PitágorasDocumento2 páginasTeorema de PitágorasNelson JopiaAún no hay calificaciones
- Lezione II Il Verbo Essere Stare AvereDocumento8 páginasLezione II Il Verbo Essere Stare AvereRheny La GammaAún no hay calificaciones
- EVALUACIÓN DE NIVEL - 6° Básico Lenguaje y Com. - I Semestre - 2017Documento8 páginasEVALUACIÓN DE NIVEL - 6° Básico Lenguaje y Com. - I Semestre - 2017660101Aún no hay calificaciones
- LOS DIEZMOS en Los Escritos de Elena de WhiteDocumento20 páginasLOS DIEZMOS en Los Escritos de Elena de WhiteAldo Ordinola TapiaAún no hay calificaciones
- Rufina Evaluacion 2da ParteDocumento2 páginasRufina Evaluacion 2da ParteRocio PrietoAún no hay calificaciones
- Poetas PasqueñasDocumento37 páginasPoetas PasqueñasFabrizio La Madrid100% (1)
- Planteo de Ecuaciones para Primer Grado de SecundariaDocumento6 páginasPlanteo de Ecuaciones para Primer Grado de SecundariaJAIME ANDRÉS SAUÑI ESPIRITUAún no hay calificaciones
- Las Aventuras de Huckleberry Finn y La Importancia de Mark TwainDocumento3 páginasLas Aventuras de Huckleberry Finn y La Importancia de Mark TwainEdwin TapiaAún no hay calificaciones
- La Importancia de La Metacognición en Los Procesos de Lectura en El Cuarto Grado de Primaria.Documento49 páginasLa Importancia de La Metacognición en Los Procesos de Lectura en El Cuarto Grado de Primaria.Martha Tovar AAún no hay calificaciones
- Formulas Formulas - Funciones en ExcelDocumento32 páginasFormulas Formulas - Funciones en ExcelPaul Sebastian Delgado SotoAún no hay calificaciones
- Mapa Mental Produccion de TextosDocumento2 páginasMapa Mental Produccion de TextosMateo Zárate MorenoAún no hay calificaciones