También podría gustarte
- Laboratorio3 SCDDocumento55 páginasLaboratorio3 SCDAlejandra RoqueAún no hay calificaciones
- Lab 2 Transformada Z 2018afinalDocumento41 páginasLab 2 Transformada Z 2018afinalwalter hilasacaAún no hay calificaciones
- Laboratorio DosDocumento21 páginasLaboratorio DosJorge Saravia VasconezAún no hay calificaciones
- Transformada ZDocumento3 páginasTransformada ZJoanSebastianBarbosaVidalAún no hay calificaciones
- Independencia de La TrayectoriaDocumento46 páginasIndependencia de La TrayectoriaJason Novoa NietoAún no hay calificaciones
- Método de Newton RaphsonDocumento8 páginasMétodo de Newton RaphsonGLORIA STHEFANYAún no hay calificaciones
- Lab Nº1 Control 2 - Acosta, Bernal, Hidalgo PDFDocumento8 páginasLab Nº1 Control 2 - Acosta, Bernal, Hidalgo PDFlweresAún no hay calificaciones
- 1PC Domiciliaria Control3Documento17 páginas1PC Domiciliaria Control3Mauro G. Tarazona LévanoAún no hay calificaciones
- Act 4 Control DigitalDocumento3 páginasAct 4 Control DigitalJose MiguelAún no hay calificaciones
- Tarea4 367Documento24 páginasTarea4 367Viviana SantosAún no hay calificaciones
- 02 Transformada ZDocumento31 páginas02 Transformada ZIsmael MinchalaAún no hay calificaciones
- Solucionario Evaluacion 2012 - I CONTROL MECATRONICO IIDocumento11 páginasSolucionario Evaluacion 2012 - I CONTROL MECATRONICO IIMajoRiosAún no hay calificaciones
- TZECUDIF333Documento9 páginasTZECUDIF333Kevin SanchezAún no hay calificaciones
- Transformada ZDocumento33 páginasTransformada ZYari Erazo BassantesAún no hay calificaciones
- Analisis Matematico UntrefDocumento5 páginasAnalisis Matematico UntrefEzequiel CernaAún no hay calificaciones
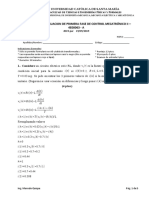
- Solucionario Examen de Primera FaseDocumento5 páginasSolucionario Examen de Primera FaseAndre ChaconAún no hay calificaciones
- Unidad 3: Tema 1: Transformaciones Lineales. Valores Y Vectores PropiosDocumento8 páginasUnidad 3: Tema 1: Transformaciones Lineales. Valores Y Vectores PropiosSTIVEN JOEL CANCHIG BARAHONAAún no hay calificaciones
- Act 5 Control DigitalDocumento5 páginasAct 5 Control DigitalJose MiguelAún no hay calificaciones
- Problemario de VariableDocumento13 páginasProblemario de VariableLlanos Izguerra SantiagoAún no hay calificaciones
- Práctico - 7 - 2 - 2023 Señales Discretas y Transformada ZDocumento2 páginasPráctico - 7 - 2 - 2023 Señales Discretas y Transformada ZSebastian SandovalAún no hay calificaciones
- Tarea Numero 1 Algebra Lineal PDFDocumento9 páginasTarea Numero 1 Algebra Lineal PDFjuan estebanAún no hay calificaciones
- Prueba 2 Matemáticas AvanzadasDocumento4 páginasPrueba 2 Matemáticas AvanzadasPerfil FalsoFalsetiAún no hay calificaciones
- Ejercicios Unidades III y IVDocumento6 páginasEjercicios Unidades III y IVPretty ThingsAún no hay calificaciones
- Regularizacion DimensionalDocumento36 páginasRegularizacion DimensionalJesús Sevilla PérezAún no hay calificaciones
- Examen Final Jean Luis Caballero Barrera.Documento11 páginasExamen Final Jean Luis Caballero Barrera.manuel escobarAún no hay calificaciones
- Tarea 1 Sistemas de Control IIDocumento8 páginasTarea 1 Sistemas de Control IIElizabethAún no hay calificaciones
- ST7 - Gav - 2018 - IDocumento5 páginasST7 - Gav - 2018 - IRafael Pachas VegaAún no hay calificaciones
- Práctica 1 de La Especialidad en Matemática.Documento8 páginasPráctica 1 de La Especialidad en Matemática.Yudelka ManzanilloAún no hay calificaciones
- Pro1Dep VCDocumento13 páginasPro1Dep VCLuis Enrique GonzalezAún no hay calificaciones
- Deber 1Documento2 páginasDeber 1Christian DavidAún no hay calificaciones
- Trabajo 3Documento8 páginasTrabajo 3MIGUEL ANGEL AHUMADAAún no hay calificaciones
- Laboratorio 4 CO - César Tesén BardalesDocumento5 páginasLaboratorio 4 CO - César Tesén BardalesCésar Tesén BardalesAún no hay calificaciones
- Boletín 4 - v2Documento2 páginasBoletín 4 - v2John WickAún no hay calificaciones
- Ejercicio1 Carlos VelezDocumento6 páginasEjercicio1 Carlos VelezCarlos Andres Arias FonsecaAún no hay calificaciones
- Taller Corte 2Documento38 páginasTaller Corte 2Yuly ArevaloAún no hay calificaciones
- Método Numérico Aceleración ConstanteDocumento6 páginasMétodo Numérico Aceleración ConstanteGerson KitAún no hay calificaciones
- Taller 3 Filtros DigitalesDocumento1 páginaTaller 3 Filtros DigitalesJeison Ayala MoralesAún no hay calificaciones
- Tarea 2 - Juan David Acuña - Grupo 40Documento16 páginasTarea 2 - Juan David Acuña - Grupo 40Juan DavidAún no hay calificaciones
- Deber 2.1Documento20 páginasDeber 2.1DavidAún no hay calificaciones
- Universidad Nacional Abierta Matemática V (739) Vicerrectorado Académico Segunda Parcial Área de Matemática Fecha: 25/03/06 Lapso 2006 - 1Documento3 páginasUniversidad Nacional Abierta Matemática V (739) Vicerrectorado Académico Segunda Parcial Área de Matemática Fecha: 25/03/06 Lapso 2006 - 1Andy TorrealbaAún no hay calificaciones
- 2011 Parcial 22 Marzo SolucioonDocumento6 páginas2011 Parcial 22 Marzo SolucioonAlvaro MartiAún no hay calificaciones
- Transformadainversa FinaldDocumento47 páginasTransformadainversa FinaldCristian AbarcaAún no hay calificaciones
- Sistema de Control DiscretoDocumento21 páginasSistema de Control DiscretorolandotomantoAún no hay calificaciones
- Informe Estabilidad JuryDocumento15 páginasInforme Estabilidad JuryAlexander CurayAún no hay calificaciones
- Práctico - 6 - 2020 Señales Discretas y Transformada ZDocumento1 páginaPráctico - 6 - 2020 Señales Discretas y Transformada Zjael molina huancaAún no hay calificaciones
- TZ 111Documento5 páginasTZ 111Kevin SanchezAún no hay calificaciones
- Taller 1 Com 2Documento8 páginasTaller 1 Com 2Sebastian FajardoAún no hay calificaciones
- Taller 1 Com 2Documento8 páginasTaller 1 Com 2Sebastian FajardoAún no hay calificaciones
- Micro ElectronicaDocumento4 páginasMicro ElectronicaJoseAlbertoZafraAún no hay calificaciones
- Solucionario Examen Parcial Matematica 3 (2014-1)Documento17 páginasSolucionario Examen Parcial Matematica 3 (2014-1)DeNis Enrike Cabreraa CAún no hay calificaciones
- Parcial2.2021 2.Tema4.SoluciónDocumento3 páginasParcial2.2021 2.Tema4.SoluciónMAURICIO REYES ROSEROAún no hay calificaciones
- Control DigitalDocumento7 páginasControl Digitalfotoscel682Aún no hay calificaciones
- Taller 4 FinalDocumento25 páginasTaller 4 FinalYomi GuerrónAún no hay calificaciones
- Ecuaciones Diferenciales de Primer Orden y Primer GradoDocumento37 páginasEcuaciones Diferenciales de Primer Orden y Primer GradoCésar DeiviAún no hay calificaciones
- DiferencialesDocumento3 páginasDiferencialesMelín JazminAún no hay calificaciones
- Ejercicio - 3 - Wilson - GualetrosDocumento7 páginasEjercicio - 3 - Wilson - GualetrosWilmar OcampoAún no hay calificaciones
- Serie de TaylorDocumento4 páginasSerie de TaylorJhordan Paitan FabianAún no hay calificaciones
- Anexo 3 Formato Tarea 1Documento24 páginasAnexo 3 Formato Tarea 1felipe sanchezAún no hay calificaciones
- Tarea1 - G614 - Grupo 614Documento40 páginasTarea1 - G614 - Grupo 614felipe sanchezAún no hay calificaciones
- Laboratorio Virtual OscarDocumento15 páginasLaboratorio Virtual Oscarfelipe sanchezAún no hay calificaciones
- Tarea4 G64 Fredy MarquezDocumento26 páginasTarea4 G64 Fredy Marquezfelipe sanchezAún no hay calificaciones
- Tarea-4 Estudiante1Documento11 páginasTarea-4 Estudiante1felipe sanchezAún no hay calificaciones
- Calculo Multi Variado Fase 1 - Tipo DDocumento8 páginasCalculo Multi Variado Fase 1 - Tipo Dfelipe sanchezAún no hay calificaciones
- Pre-Tarea Sistemas Dinámicos UNADDocumento13 páginasPre-Tarea Sistemas Dinámicos UNADfelipe sanchezAún no hay calificaciones
- Pre-Tarea Microprocesadores UNADDocumento5 páginasPre-Tarea Microprocesadores UNADfelipe sanchezAún no hay calificaciones
- Pretarea - Calculo Multi-Variado UNADDocumento9 páginasPretarea - Calculo Multi-Variado UNADfelipe sanchezAún no hay calificaciones
- Trabajo Colaborativo Fisica Moderna UnadDocumento33 páginasTrabajo Colaborativo Fisica Moderna Unadfelipe sanchezAún no hay calificaciones
- Gestion de RiesgosDocumento10 páginasGestion de RiesgosAnahí SamaniegoAún no hay calificaciones
- ACT 2 Gerardo Orozco MarquezDocumento3 páginasACT 2 Gerardo Orozco MarquezBrandon OrozcoAún no hay calificaciones
- Bloque 3 GeoDocumento20 páginasBloque 3 GeoatzyLugoAún no hay calificaciones
- Cuaderno Auxiliar de Centro de ComputoDocumento64 páginasCuaderno Auxiliar de Centro de ComputoJorge Villarroel cardenasAún no hay calificaciones
- Aplicación de La Simulación Monte Carlo en El Cálculo Del Riesgo Usando ExcelDocumento2 páginasAplicación de La Simulación Monte Carlo en El Cálculo Del Riesgo Usando ExcelANGELA CHAVARROAún no hay calificaciones
- Protocolo Estructurado Cad 3C Com Fabio MendozaDocumento40 páginasProtocolo Estructurado Cad 3C Com Fabio MendozaCristopher MendozaAún no hay calificaciones
- Conceptos de Modelación de SistemasDocumento34 páginasConceptos de Modelación de SistemasRonalMamani100% (1)
- Introducción A La Investigación de OperacionesDocumento18 páginasIntroducción A La Investigación de OperacionesAntonio HernandezAún no hay calificaciones
- Simulacion de Circuito Hidraulico en FluidSimDocumento8 páginasSimulacion de Circuito Hidraulico en FluidSimChristian Aranda UlloaAún no hay calificaciones
- Presentación Del Curso Microprocesadores y MicrocontroladoresDocumento4 páginasPresentación Del Curso Microprocesadores y MicrocontroladoresWilson HeverlandAún no hay calificaciones
- Implementacion de Simuladores de NegociosDocumento29 páginasImplementacion de Simuladores de NegociosFrank OrdoñezAún no hay calificaciones
- Diapositivas GRAFCETDocumento50 páginasDiapositivas GRAFCETLeonard KevAún no hay calificaciones
- Preguntas Entrevista STSDocumento3 páginasPreguntas Entrevista STSFranco Velazco VentoAún no hay calificaciones
- Manual Fluid SimDocumento295 páginasManual Fluid SimGerman Bello PeraltaAún no hay calificaciones
- ITL-AC-PO-008-09 FORMATO Reporte de Evaluacion Final de R PDocumento2 páginasITL-AC-PO-008-09 FORMATO Reporte de Evaluacion Final de R PNiza VidalAún no hay calificaciones
- SIMULACIONDocumento9 páginasSIMULACIONgianfrancoAún no hay calificaciones
- Sesión de Planificación No.2 III BIMDocumento5 páginasSesión de Planificación No.2 III BIMCristofer CordovaAún no hay calificaciones
- 0 - LEEME PRIMERO - Presentación y Metodología DidácticaDocumento5 páginas0 - LEEME PRIMERO - Presentación y Metodología DidácticaAnibal CadenaAún no hay calificaciones
- Taller 3. Simulación MontecarloDocumento5 páginasTaller 3. Simulación MontecarlojuljotaAún no hay calificaciones
- Trabajo Final Simulacion - Samary Lorena Herrera - Maria Alejandra VillegasDocumento30 páginasTrabajo Final Simulacion - Samary Lorena Herrera - Maria Alejandra VillegasDaniel MuñozAún no hay calificaciones
- Calor Especifico Del CafeDocumento13 páginasCalor Especifico Del Cafe13177566Aún no hay calificaciones
- Taller 1 Diego FlorezDocumento19 páginasTaller 1 Diego FlorezMargarita Reyes VillamizarAún no hay calificaciones
- GeodupmdeeDocumento354 páginasGeodupmdeeDarwin Uriel Pacco MamaniAún no hay calificaciones
- Modelos de Procesos EjecutablesDocumento10 páginasModelos de Procesos EjecutablesBryan TevilloAún no hay calificaciones
- Chavez Aguilar Ariel Homero - Practica N4Documento7 páginasChavez Aguilar Ariel Homero - Practica N4Ariel ChavezAún no hay calificaciones
- Pen Sis 55Documento19 páginasPen Sis 55compraspto diazAún no hay calificaciones
- Aspen Kbase Ed VersionEspanolDocumento466 páginasAspen Kbase Ed VersionEspanolIngrid GuzmanAún no hay calificaciones
- Manual de Procedimiento SIMONU 2014Documento60 páginasManual de Procedimiento SIMONU 2014Pulido MarioAún no hay calificaciones
- Base para Guion de Talleres SCIDocumento2 páginasBase para Guion de Talleres SCIGermán Gabriel Martínez MaldonadoAún no hay calificaciones
- FT Manual Intro Pract ClinicaDocumento43 páginasFT Manual Intro Pract ClinicaElizabeth A DlpAún no hay calificaciones